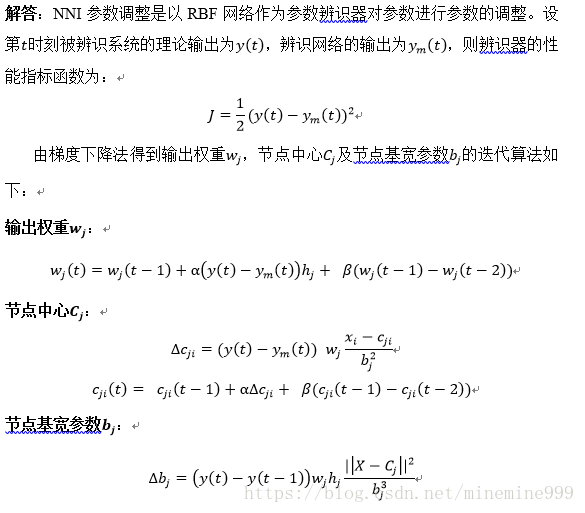
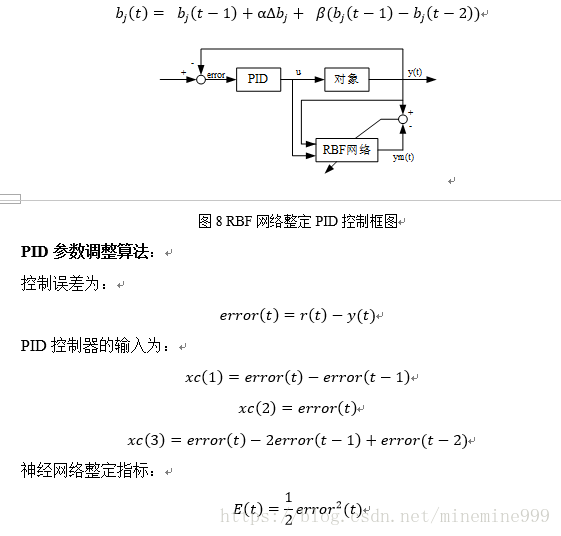
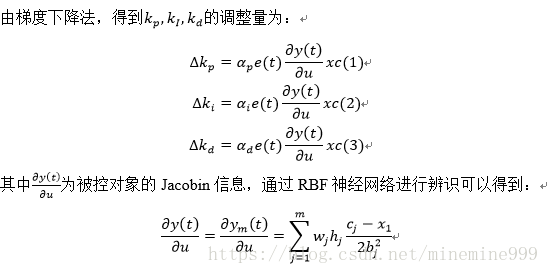
RBF网络实现PID参数自整定

代码如下
clear;
clc;
%% 参数初始化
lr=0.1;%学习速率
beta=0.05;%动量因子
x=[0,0,0]';%初始化输入
nn=6;%隐含层节点数
%RBF网络3-6-1结构初始化参数
ci=30*ones(3,nn);%节点基函数中心向量
bi=40*ones(nn,1);%节点基函数方差
w=10*ones(nn,1); %输出层权重
h=zeros(nn,1);%隐藏层输出向量
ci_1=ci;ci_3=ci_1;ci_2=ci_1;
bi_1=bi;bi_2=bi_1;bi_3=bi_2;
w_1=w;w_2=w_1;w_3=w_1;
u_1=0;y_1=0;
ec=[0,0,0]';%误差变化率ec,e,ecc
error_1=0;error_2=0;error=0;
% PID 初始参数设置
kp0 = 0.03;
ki0 = 0.28;
kd0 = 0.03;
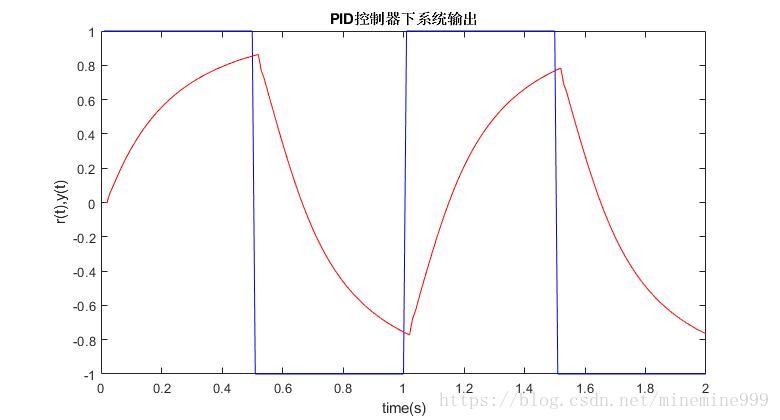
flag=1;%控制模式flag=0 PID&RBF;flag=1 PID
kp_1=kp0;
kd_1=kd0;
ki_1=ki0;
%pid参数学习率
kp_lr=0.20;
kd_lr=0.20;
ki_lr=0.20;
ts=0.01;
%%
for t = 1:1:200
time(t)=t*ts;
r(t)=1.0*sign(sin(2*pi*t*ts));%系统参考输入
y(t)=(-0.3*y_1+u_1)/(6+y_1^2);%系统输出
%% 前向传播
%1.计算每个节点RBF的输出
for j=1:1:nn
h(j)=exp(-norm(x-ci(:,j))^2/(2*bi(j)*bi(j)));
end
%2. RBF网络输出
ym(t)=w'*h;
%% 反向传播
%1. 输出权重更新计算
d_w=0*w;
for j=1:1:nn
d_w(j)=lr*(y(t)-ym(t))*h(j);
end
w=w_1+d_w+beta*(w_1-w_2);
%2. 节点基函数方差更新
d_bi=0*bi;
for j=1:1:nn
d_bi(j)=lr*(y(t)-ym(t))*w(j)*h(j)*(bi(j)^-3)*norm(x-ci(:,j))^2;
end
bi=bi_1+ d_bi+beta*(bi_1-bi_2);
%3. 节点中心更新
for j=1:1:nn
for i=1:1:3
d_ci(i,j)=lr*(y(t)-ym(t))*w(j)*h(j)*(x(i)-ci(i,j))*(bi(j)^-2);
end
end
ci=ci_1+d_ci+beta*(ci_1-ci_2);
%% 系统雅可比矩阵计算
yu=0;
for j=1:1:nn
yu=yu+w(j)*h(j)*(-x(1)+ci(1,j))/bi(j)^2;
end
dyout(t)=yu;
%% PID控制器参数修改
error(t)=r(t)-y(t);
kp(t)=kp_1+kp_lr*error(t)*dyout(t)*ec(1);
kd(t)=kd_1+kd_lr*error(t)*dyout(t)*ec(2);
ki(t)=ki_1+ki_lr*error(t)*dyout(t)*ec(3);
if kp(t)<0
kp(t)=0;
end
if kd(t)<0
kd(t)=0;
end
if ki(t)<0
ki(t)=0;
end
switch flag
case 0
case 1
kp(t)=kp0;
ki(t)=ki0;
kd(t)=kd0;
end
du(t)=kp(t)*ec(1)+kd(t)*ec(2)+ki(t)*ec(3); %增量PID控制
u(t)=u_1+du(t);
%Return of parameters
x(1)=du(t);
x(2)=y(t);
x(3)=y_1;
u_1=u(t);
y_1=y(t);
ci_3=ci_2;
ci_2=ci_1;
ci_1=ci;
bi_3=bi_2;
bi_2=bi_1;
bi_1=bi;
w_3=w_2;
w_2=w_1;
w_1=w;
ec(1)=error(t)-error_1;
ec(2)=error(t)-2*error_1+error_2;
ec(3)=error(t);
error_2=error_1;
error_1=error(t);
kp_1=kp(t);
kd_1=kd(t);
ki_1=ki(t);
end
%% 绘图
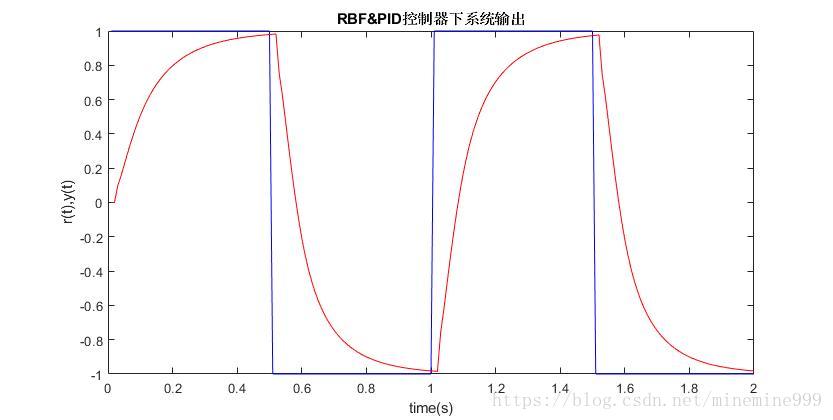
figure(1);
plot(time,r,'b',time,y,'r');
xlabel('time(s)');ylabel('r(t),y(t)');
title('RBF&PID控制器下系统输出')
figure(2);
plot(time,error);
xlabel('times(s)');ylabel('error(t)');
title('RBF&PID控制器下系统误差');
figure(3);
plot(time,kp,time,ki,time,kd);
xlabel('times(s)');
ylabel('kp,ki,kd');
title('kp,ki,kd整定');
legend('kp','ki','kd');
grid on;
系统输出: