控制器
电机控制器为级联式,采用位置,速度和电流控制回路,如下图所示。 当控制模式设置为位置控制时,整个循环都会运行。 在速度控制模式下运行时,位置控制部分将不被使用,并将速度命令直接输入到第二级输入中。 同理,在电流控制模式下,仅使用电流控制回路。
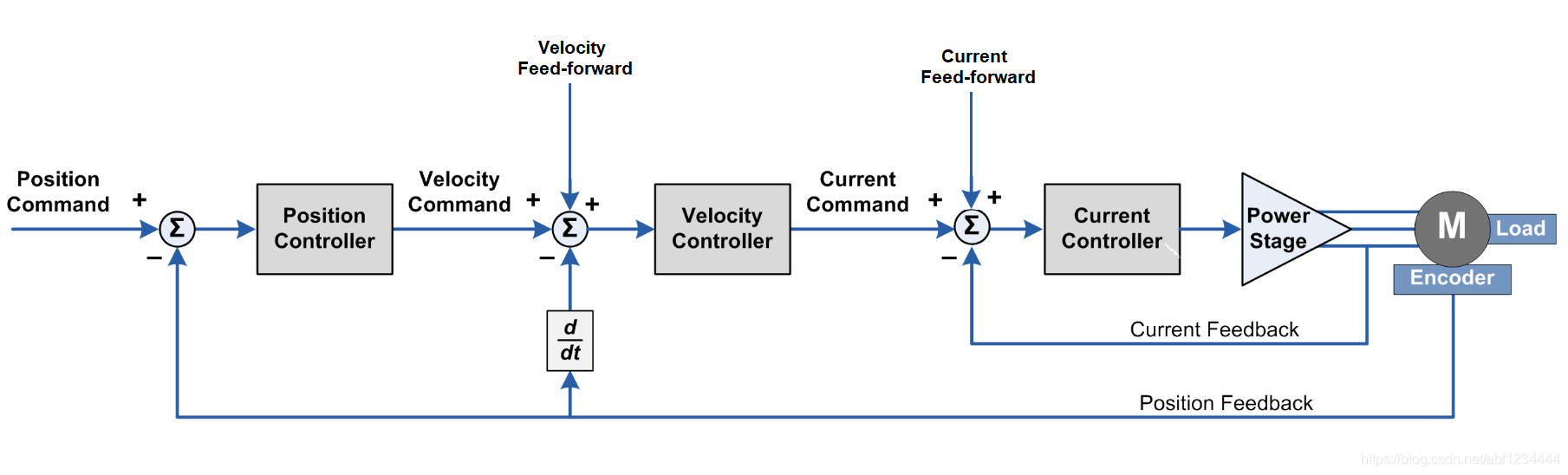
每个控制回路都是基于PID控制器。PID控制器是一种被广泛应用的控制方式,可以适用于控制大部分系统。 这种灵活性使得ODrive可以用于控制各种机械系统。
位置环:
位置环控制器是一个具有单个比例增益的P环路。
pos_error = pos_setpoint - pos_feedback
vel_cmd = pos_error * pos_gain + vel_feedforward
速度环:
速度环控制器是一个PI环路。
vel_error = vel_cmd - vel_feedback
current_integral += vel_error * vel_integrator_gain
current_cmd = vel_error * vel_gain + current_integral + current_feedforward
电流环:
电流环控制器是一个PI环路。
current_error = current_cmd - current_fb
voltage_integral += current_error * current_integrator_gain
voltage_cmd = current_error * current_gain + voltage_integral (+ voltage_feedforward when we have motor model)
可以通过阅读ODrive源码中的 "controller.cpp"文件来获取更多信息。
参数整定
调整电机控制器是释放ODrive潜力的必不可少的步骤。通过调整,控制器可以快速响应系统中的干扰或变化(例如施加的外力或设定值的变化)而不会变得不稳定。 正确设置三个调整参数(称为增益)可确保ODrive能够以最有效的方式控制电动机。 这三个参数是:
<axis>.controller.config.pos_gain = 20.0[(counts/s) / counts]<axis>.controller.config.vel_gain = 5.0 / 10000.0[A/(counts/s)]<axis>.controller.config.vel_integrator_gain = 10.0 / 10000.0[A/((counts/s) * s)]
我们即将推出带有自动调整功能的版本。 但在此之前还是需要手动调节,以下是一个粗略的调整过程:
- 设置
vel_integrator_gain为 0 - 逐渐减小另外两个值使系统达到稳定状态
- 逐渐增加
vel_gain,每次增加 30% 左右,直到电机出现轻微的震荡 - 设置
vel_gain为出现轻微震动时值的 50% - 逐渐增加
pos_gain,每次增加 30% 左右,直到您看到有些过冲 - 逐渐减小
pos_gain,直到过冲消失 - 可以将积分器
vel_integrator_gain设置为0.5 * 带宽 * vel_gain,其中“带宽”是您的系统的控制带宽。 例如,您发送一条运动控制指令,假设您的调整使它以100ms的建立时间(从设定值更改到系统到达新设定值的时间)跟踪命令; 这意味着带宽为1/(100ms)=1/(0.1s)=10hz。 在这种情况下,您应该设置vel_integrator_gain = 0.5 * 10 * vel_gain。
实时绘图功能对于调整控制器参数帮助很大,例如,可以通过在odrivetool中运行以下命令来以曲线的形式实时显示设置位置和实际位置:
start_liveplotter(lambda:[odrv0.axis0.encoder.pos_estimate, odrv0.axis0.controller.pos_setpoint])
如果您有任何问题或疑问,欢迎您加入ODrive社区或QQ群 851421965 进行交流。
