本系统主要由两个部件构成:嵌入式硬件平台和USB设备,通过USB总线建立起它们之间通讯,如图2.16所示,USB设备Kinect中包含一个USB集线器,在Kinect内部通过Hub将红外摄像头、彩色摄像头、电机等设备连接到Kinect内部USB总线上面,最后将Kinect设备连接到ARM9嵌入式硬件平台的Roothub上面。
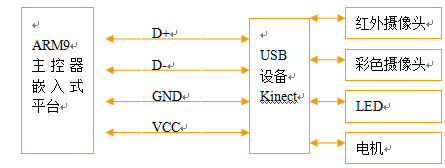
图2.16 系统硬件连接图
本系统的软件系统设计主要核心部分是Libusb,它为USB设备驱动程序开发提供一系列API,它封装了许多USB协议和底层内核交互代码,将驱动开发从内核空间搬移到用户空间。为了实现Libusb运行在嵌入式linux平台上面,需要USB文件系统和linux底层USB驱动代码作为底层接口支持,而这些接口最终依赖于一个嵌入式linux操作系统。总的来说,本系统软件层次如下图2.17所示:

图2.17 系统软件设计图
详细步骤:
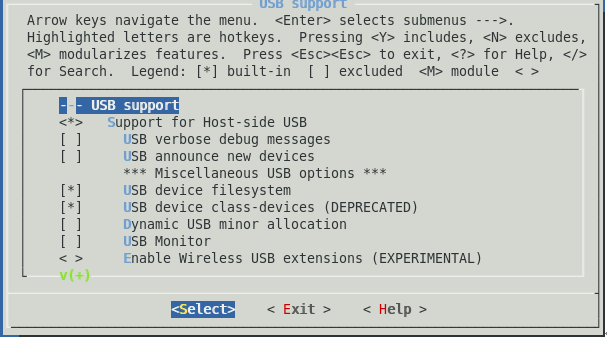
step1: 搭建一个嵌入式linux平台
本人用的是TQ2440 , 这个就直接用了出厂的源程序, 不过需要注意的是, libusb是基于usb文件系统的,所以移植的时候一定要包含进来
step2: 编译libusb
具体的安装编译步骤如下:
1. 解压libusb-1.0.9.tar到当前文件中:
#tar –vxf libusb-1.0.9.tar –C ./
2. 使用cd命令进入到解压后的文件夹中,运行配置文件:
#./configure CC=arm-linux-gccCXX=arm-linux-g++ /
--build=i686-linux --host=arm-linux
其中--build=i686-linux表示软件是在X86平台下编译的,--host=arm-linux表示使用的是交叉编译器arm-linux-进行编译,系统默认是将软安装到/usr/local/lib目录下,需要更改使用--prefix=/path/to/install。
3. 编译安装:
#make
#make install
4. 进入/usr/local/lib/目录查看是否生成目标文件。
#cd /usr/local/lib/
可以看到在该目录下,多出一个libusb的文件夹,里面有一个include和lib目录。
5. 挂载NFS,通过nfs将include目录和lib目下的文件拷贝到开发板上
#mount –t nfs 192.168.0.7:/opt/nfs /mnt/nfs
这里192.168.0.7为开发板的地址。
step3: 使用libusb编写一个usb设备遍历程序
代码如下:附录A 使用libusb遍历usb设备程序源码
/****************************************************************************
*****desc: 使用libusb库函数编程遍历当前所有的usb设备
*****author: lxz
*****create data: 2013,3,20
*****modify data: 2013,4,25
******************************************************************************/
#include <stdio.h>
#include <stdlib.h>
#include "libusb.h"
#include <pthread.h>
int main()
{
libusb_device **devs ; // used to retrieve a list of device
libusb_context *ctx = NULL ; //a libusb session
struct libusb_device_descriptor desc ;
int r = 1 ; //for return value
ssize_t cnt ; //holding number of devices in list
r = libusb_init(&ctx); //initialize the library for the session we just declared
if( r<0)
{
fprintf(stderr, "failed to initalise libusb\n"); //there was a error
exit(1) ;
}
else
{
printf("init successful !\n");
}
libusb_set_debug(ctx,3); //set verbosity level to 3, as suggested in the documention
cnt = libusb_get_device_list(ctx, &devs) ; //get the list of devices
if(cnt <0)
{
fprintf(stderr, "Get Device Error\n");
exit(1);
}
printf("%d Device in list .\n", cnt) ;
ssize_t i ; //for iterating through the list
for(i=0; i<cnt; i++)
{
r = libusb_get_device_descriptor(devs[i], &desc) ;
if(r<0)
{
printf("failed to get device descriptor\n") ;
exit(1);
}
printf("Number of possible configurations:%d\n", desc.bNumConfigurations);
printf("Device Class:%d\n", desc.bDeviceClass);
printf("Vendor ID:%d\n", desc.idVendor) ;
printf("Product ID :%d\n", desc.idProduct );
}
return 0;
}
编译:

将生成的代码,通过nfs下载到TQ2440开发板中, 在开发板上, 运行刚刚编译的程序,

libusb成功运行在ARM平台上面, 接下来就是对kinect进行操作了。
详细介绍, 有空再更新