版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/github_39611196/article/details/82852844
MRPT(Mobile Robot Programming Toolkit,移动机器人编程工具箱)的安装。
1、准备编译环境:
sudo apt-get install build-essential pkg-config cmake \
libwxgtk2.8-dev libftdi-dev freeglut3-dev \
zlib1g-dev libusb-1.0-0-dev libudev-dev libfreenect-dev \
libdc1394-22-dev libavformat-dev libswscale-dev \
libassimp-dev libjpeg-dev libopencv-dev libgtest-dev \
libeigen3-dev libsuitesparse-dev libpcap-dev
2、运行如下命令安装cmake-gui:
sudo apt-get install cmake3-qt-gui3、下载MRPT源码,解压后放到ubuntu中,进入MRPT源码文件夹下,创建build目录:
cd mrpt1.5.5
mkdir build
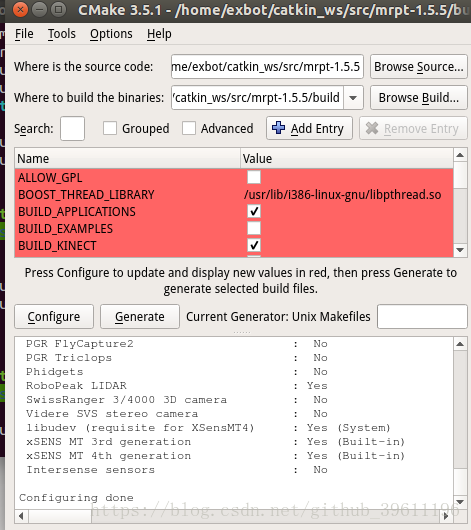
4、使用cmake-gui生成配置文件,其中设置"source dir" 为下载的MRPT 源码路径。设置"binary directory"为MRPT源码目录下的build目录,用于存放生成的工程文件。点"configure",完成后点击"Generate"。
sudo cmake-gui
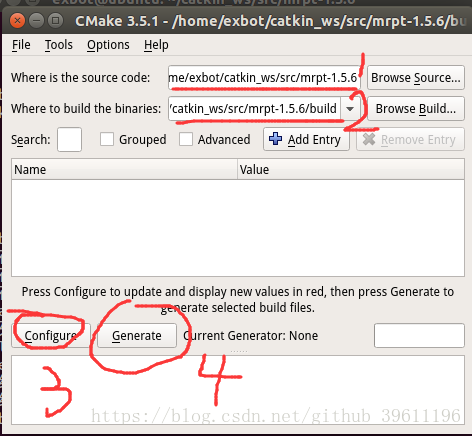
注:如出现如下这种红色的,则在点击configure之后,再点击一次configure,完成后点击generate。
5、进入build文件夹下并开始编译。
cd build
sudo make -j4
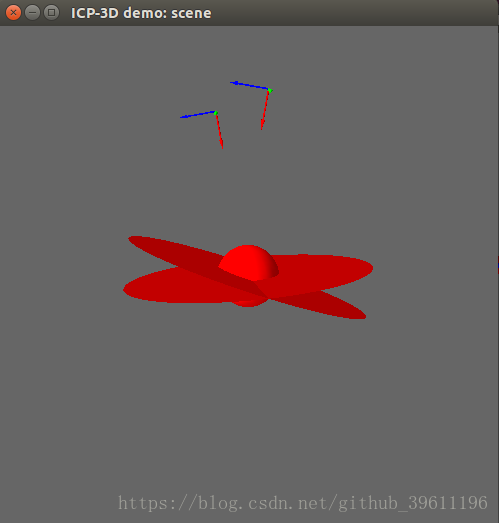
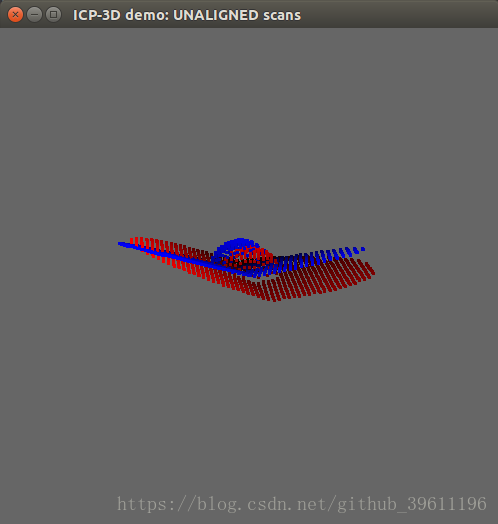
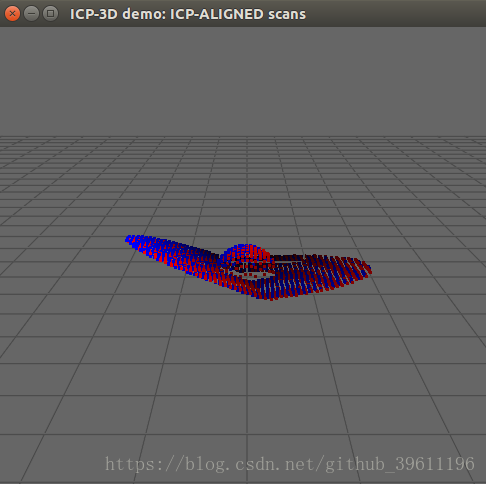
6、测试。
cd ..
cd samples
cd icp3D
cmake .
make
./icp3D即可看到下列运行结果: