1、添加ROS软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2、添加密钥
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
3、安装ROS
sudo apt-get update
sudo apt-get install ros-melodic-desktop-full
在这个过程中,根据ubuntu的版本选择合适的ROS版本,我使用的是Ubuntu18.04.3,所以使用melodic不会报错。
除此之外还有Melodic、Lunar、Kinetic版本,根据linux系统不同选择合适的版本,报错的原因也就是版本选择不合适。
4、初始化rosdep
sudo rosdep init
rosdep update
5、设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
6、安装rosinstall
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
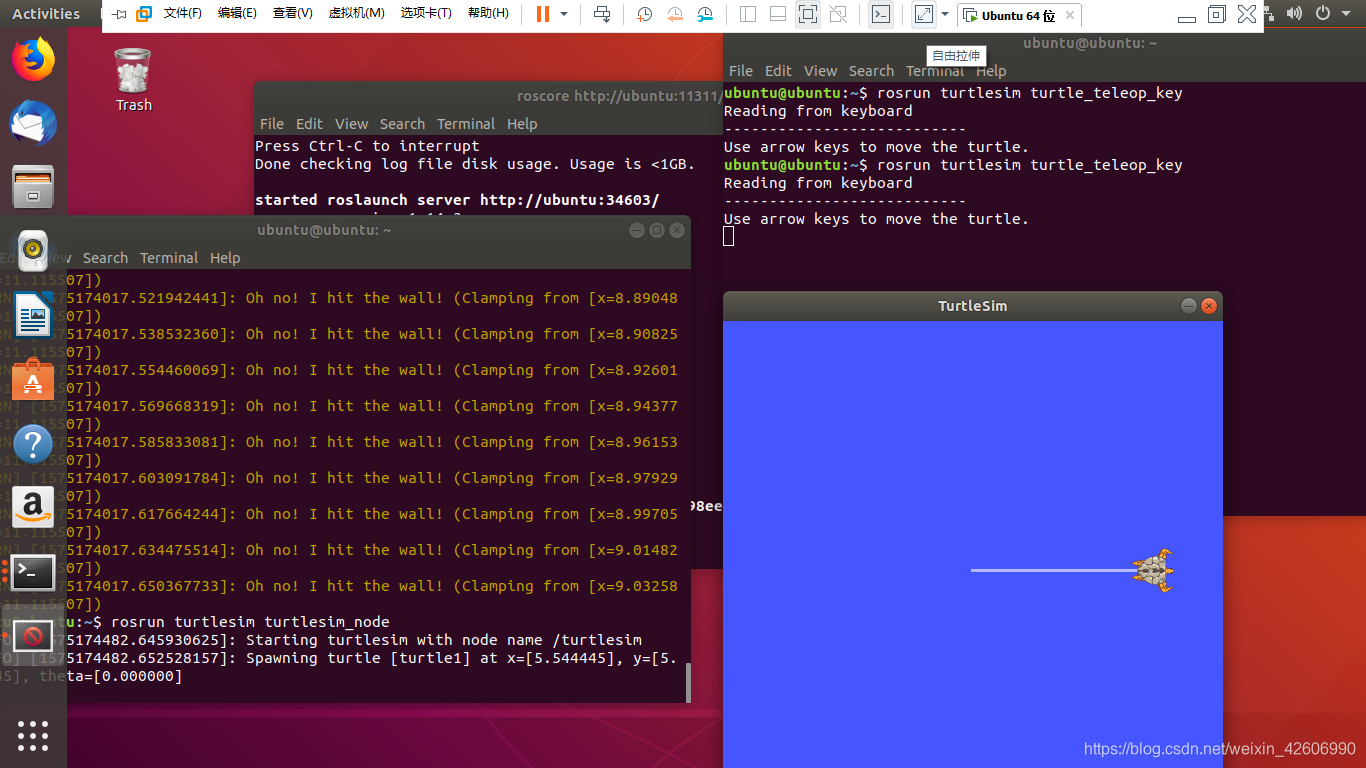
7、启动ROS master
roscore
8、启动小海龟仿真器
rosrun turtlesim turtlesim_node
9、启动海归控制节点
rosrun turtlesim turtle_teleop_key