版权声明:本文为博主 一銤阳光 学习整理的文章,如需转载,请注明出处、附上CSDN博文链接。 https://blog.csdn.net/CSDNhuaong/article/details/81155865
调试命令
rostopic info /mavros/home_position/home
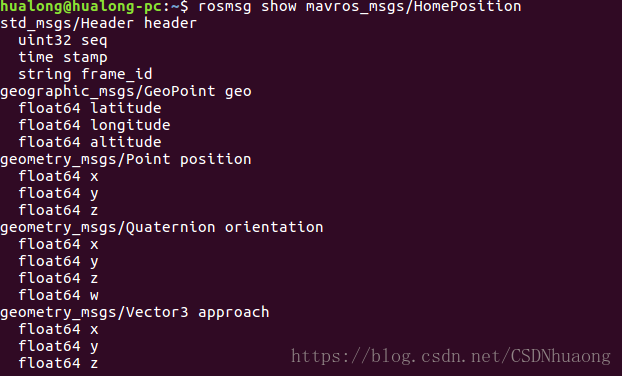
查看这个话题的消息类型rosmsg show mavros_msgs/HomePosition
查看话题中消息的具体数据类型
头文件
//相应的包含
#include "mavros_msgs/HomePosition.h" //topic message话题的回调函数
//订阅home位置信息
mavros_msgs::HomePosition home_position;
void get_home_Callback(const mavros_msgs::HomePosition::ConstPtr& msg){
home_position.geo.latitude = msg->geo.latitude;
home_position.geo.longitude = msg->geo.longitude;
home_position.geo.altitude = msg->geo.altitude;
}发布话题/订阅话题
ros::Subscriber target_sub = nh.subscribe<mavros_msgs::HomePosition>("mavros/home_position/home",5,get_home_Callback);