Jacobi Method
The Jacobi Method is a form of fixed-point iteration. Let D denote the main diagonal
of A, L denote the lower triangle of A (entries below the main diagonal), and U denote the
upper triangle (entries above the main diagonal). Then A = L + D + U, and the equation
to be solved is Lx + Dx + Ux = b. Note that this use of L and U differs from the use
in the LU factorization, since all diagonal entries of this L and U are zero. The system of
equations Ax = b can be rearranged in a fixed-point iteration of form:

function [x]=jacobi(A,x0,b)
D=diag(diag(A));
L=tril(A,-1);
U=triu(A,1);
B=-inv(D)*(L+U);
g=inv(D)*b;
for i=1:15
x=B*x0+g;
x0=x;
end
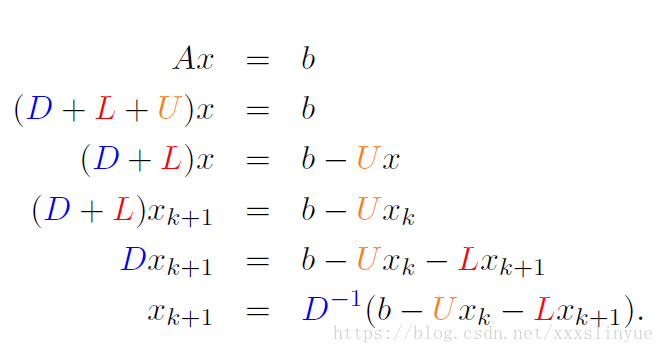
Gauss–Seidel Method:
Closely related to the Jacobi Method is an iteration called the Gauss–Seidel Method. The
only difference between Gauss–Seidel and Jacobi is that in the former, the most recently
updated values of the unknowns are used at each step, even if the updating occurs in the

current step.
function [x]=gauss(A,x0,b)
D=diag(diag(A));
L=tril(A,-1);
U=triu(A,1);
B = -inv(D+L)*U;
g = inv(D+L)*b;
for k=1:15
x=B*x0+g;
x0=x;
end
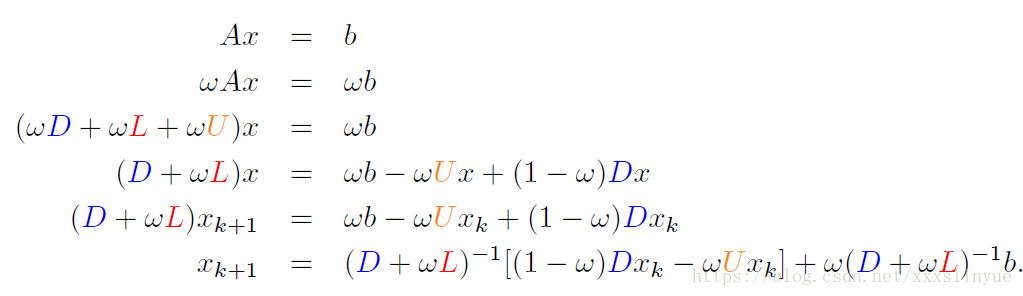
Successive Over-Relaxation Method:
The method called Successive Over-Relaxation (SOR) takes the Gauss–Seidel direc-
tion toward the solution and “overshoots’’ to try to speed convergence. Let ω be a real number, and define each component of the new guess x k+1 as a weighted average of ω
times the Gauss–Seidel formula and 1 − ω times the current guess x k . The number ω is
called the relaxation parameter, and ω > 1 is referred to as over-relaxation.
(L+D+U)x=b
function [x]=sor(A,x0,b,w)
D=diag(diag(A));
L=tril(A,-1);
U=triu(A,1);
B = inv(D+w*L)*((1-w)*D-w*U);
g = w*inv(D+w*L)*b;
for k=1:15
x=B*x0+g;
x0=x;
end
Conjugate Gradient Method;
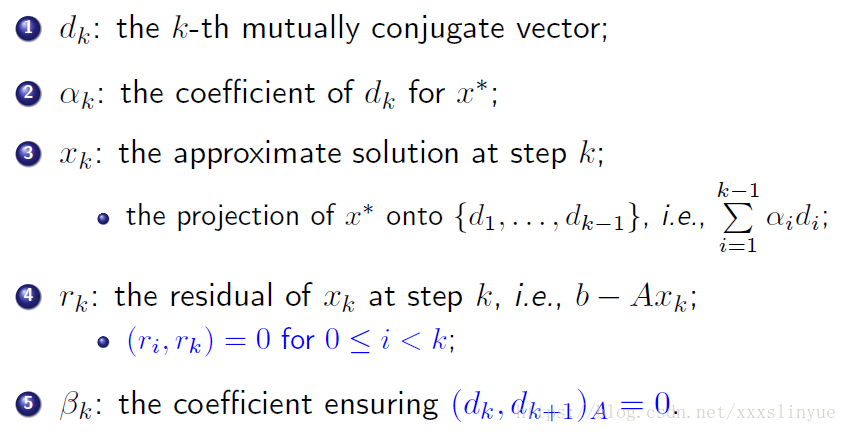
So,

function [x0]=conjugate(A,x0,b)
d0 = b-(A*x0);
r0 = d0;
for k=1:15
a = (norm(r0))^2/(d0'*A*d0);
x0 = x0+a*d0;
r1 = r0-a*A*d0;
beta = (norm(r1)^2)/(norm(r0)^2);
d0 = r1+beta*d0;
r0 = r1;
end
Conjugate Gradient Method with Jacobi preconditioner.

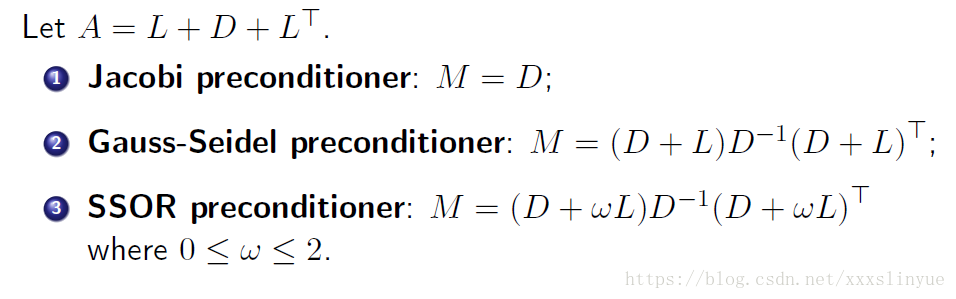

Then:

function [x0]=preconditionConjugate(A,x0,b)
D = diag(diag(A));
M = D;
r0 = b-(A*x0);
z0 = inv(M)*r0;
d0 = z0;
for k=1:15
a = (r0'*z0)/(d0'*A*d0);
x0 = x0+a*d0;
r1 = r0-a*A*d0;
z1 = inv(M)*r1;
beta = (r1'*z1)/(r0'*z0);
d0 = r1+beta*d0;
r0 = r1; z0 = z1;
end