0. 代数解法和几何解法
0.0 代数解法
我们用三连杆的平面操作臂为例:
就像这样的:

我们可以得出他的D-H参数表:

根据我们之前说过的知识。我们可以得到基座标系到腕部坐标系的变换矩阵,即正运动学方程:
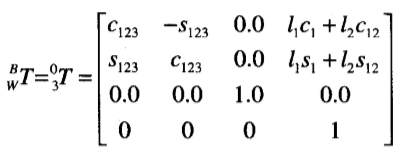
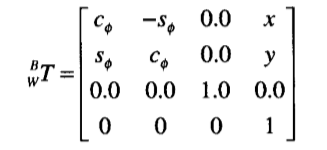
由于我们是在讨论平面内的逆运动学,所以我们只需要确定三个量就可以确定目标点的位姿。这三个量分别是x,y,Φ,Φ是连杆3在平面内的方位角。
由此,我们可以写出另一个运动学方程:
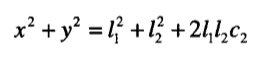
联立两个运动学方程可得:

将(4-10)和(4-11)同时平方,两式相加化简可得:
由于这时,式中只有c2一个未知量,所以我们可以很容易地解出c2
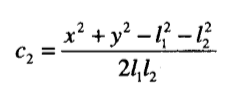
得到的c2的值如果在-1到1之间的话,说明有解。否则说明无解,目标点超出了操作臂的工作空间。
如果有解的话,那么我们就可以接下去做了:
根据二幅角反正切公式得:
这样子做是为了求得所有的解,且所求的角度是在适当的象限里的。
现在我们已经得到θ2的值了,那么意味着s2 c2都是已知量。那么(4-10)和(4-11)中只有θ1一个未知量。那么我们就可以通过(4-10)和(4-11)求出θ1。
我们可以将(4-10)和(4-11)变成下面的形式:
其中:
接下来就是重要的一步:
假设:
那么就有:
那么将上式代入(4-17)和(4-18)我们就可以得到这样的式子:
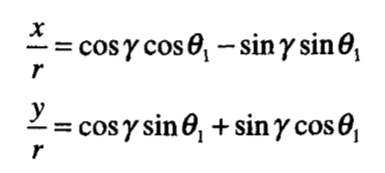
我们可以惊奇地发现,右式是一种可以化简的形式,那么我们可以化简得到:
利用二幅角反正切公式得:

从而:

我们到此已经得到θ1和θ2的值了,那么再回过头看(4-8)和(4-9),我们可以由此得出关于θ3的方程:

由此解出θ3
0.1 几何解法
在几何解法中,我们为了得出操作臂的解,需要将操作表的空间几何参数转换到平面几何参数上去,用几何解法可以解许多操作表的运动学,而且相当容易直观。
还是拿刚刚的操作臂举例:

观察几何关系的部分我就不多说了,有高中数学基础的小伙伴们都可以自行寻找出来:
我们可以直接根据找到的几何关系,运用余弦定理求解θ2:

由于:
解得:
为求出θ1,我们需要建立两个中间的辅助角,β和Ψ,最后θ1 = β ± Ψ,因为可能会有两个解。

最后:
这样就可以通过几何关系求解该操作臂的逆运动学了。