1.概述
ROS执行命令管理ROS节点的运行。最重要的是,roscore被用作节点之间的名称服务器。执行命令是rosrun和roslaunch。rosrun运行一个节点,当运行多个节点或设置各种选项时使用roslaunch。rosclean是删除节点执行时记录的日志的命令。
| 命令 | 重要度 | 命令释义 | 详细说明 |
| roscore | ★★★ | ros+core | master(ROS名称服务) + rosout(日志记录) + parameter |
| rosrun | ★★★ | ros+run | 运行节点 |
| roslaunch | ★★★ | ros+launch | 运行多个节点或设置运行选项 |
| rosclean | ★★☆ | ros+clean | 检查或删除ROS日志文件 |
2.roscore:运行roscore
roscore [选项]
roscore命令会运行主节点,主节点管理节点之间的消息通信中的连接信息。主节点是使用ROS时必须首先被运行的必要元素。ROS 主节点由roscore运行命令来驱动,并作为XMLRPC服务器运行。主节点接收多种信息的注册,如节点的名称、话题和服务名称、消息类型、URI地址和端口号,并在收到节点的请求时将此信息通知给其他节点。此外,会运行rosout,这个命令用于记录ROS中使用的ROS标准输出日志,例如DEBUG、INFO、WARN、ERROR和FATAL。它还运行一个管理参数的参数服务器。
当执行roscore时,将用户设置的ROS_MASTER_URI作为主URI,并且驱动主节点。用户可以在~/.bashrc设置ROS_MASTER_URI。
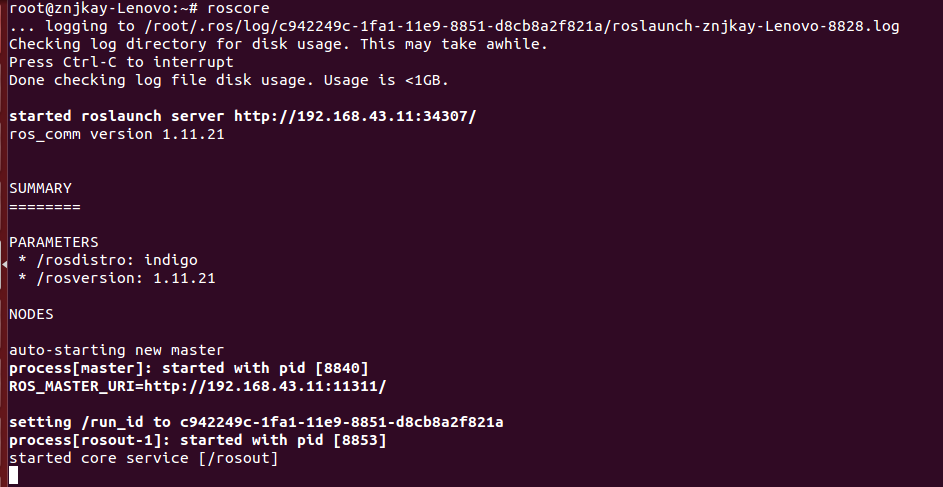
从结果可以看出如下信息:日志保存在/root/.ros/log/目录中;可以使用[Ctrl+c]退出roscore;roslaunch server、ROS_MASTER_URI等信息;/rosdistro和/rosversion的参数服务器;/rosout节点正在运行。