1.经典PID控制算法框图

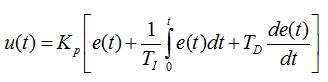
2.经典PID控制算法公式
3. 经典PID控制公式用C语言实现
float pidUpdate(PidObject* pid, const float error)
{
float output;
pid->error = error;
pid->integ += pid->error * pid->dt;
if (pid->integ > pid->iLimit)
{
pid->integ = pid->iLimit;
}
else if (pid->integ < pid->iLimitLow)
{
pid->integ = pid->iLimitLow;
}
pid->deriv = (pid->error - pid->prevError) / pid->dt;
pid->outP = pid->kp * pid->error;
pid->outI = pid->ki * pid->integ;
pid->outD = pid->kd * pid->deriv;
output = pid->outP + pid->outI + pid->outD;
pid->prevError = pid->error;
return output;
}
PidObject 为 PID 对象结构体数据类型:
typedef struct
{
float desired; //< set point
float error; //< error
float prevError; //< previous error
float integ; //< integral
float deriv; //< derivative
float kp; //< proportional gain
float ki; //< integral gain
float kd; //< derivative gain
float outP; //< proportional output (debugging)
float outI; //< integral output (debugging)
float outD; //< derivative output (debugging)
float iLimit; //< integral limit
float outputLimit; //< total PID output limit, absolute value. '0' means no limit.
float dt; //< delta-time dt
float out; //< out
} PidObject;第一个参数为将被更新的 PID 结构体对象,第二个参数则是偏差(期望值-测量值),积分项为偏差对时间的积分,微分项则是偏差对时间的微分,然后函数里面有三个参数 pid->kp,pid->ki,pid->kd 分别指的是该 pid 对象的比例项,积分项和微分项系数,每个 pid 对象都有属于自己的 PID 系数,PID 初始化 pid 对象的时候会设定一组默认的系数,同时这组系数是可以调整的,我们常说的 PID 参数整定,其实就是调整这组系数,让它满足你的系统。
(参考ATK公式四旋翼飞行器开源代码)