参考
https://segmentfault.com/a/1190000016981700
进阶的Redis之哈希分片原理与集群实战
https://blog.csdn.net/valada/article/details/81639673?utm_source=blogxgwz8
美团redis集群技术分享
1. Redis KV存储的实现
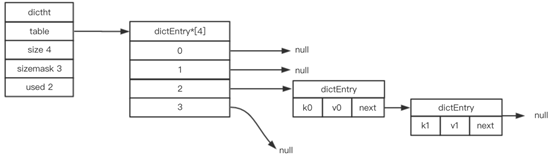
Redis作为K-V键值对存储数据库,其键值对存储方式是通过字典Dict保存的,而字典底层是通过哈希表(dictht)来实现的,通过哈希表中的节点保存字典中的键值对。类似于Java中的HashMap,将key通过哈希函数映射到哈希表节点位置。
(1)Redis 哈希表dictht结构体
typedef struct dictht {
dictEntry **table; // 哈希表数组
unsigned long size; // 哈希表的大小
unsigned long sizemask; // 哈希表大小掩码
unsigned long used; // 哈希表现有节点的数量
} dictht;
例如下图所示一个大小为4的空哈希表(redis默认初始化值为4)

(2) redis 哈希桶dictEntry
Redis哈希表dictht中的table数组存储的是哈希桶结构(dictEntry),里面就是redis的键值对。类似于java的HashMap,Redis的dictEntry也是通过链表(next指针)方式来解决hash冲突。
/* 哈希桶 */
typedef struct dictEntry {
void *key; // 键定义
// 值定义
union {
void *val; // 自定义类型
uint64_t u64; // 无符号整形
int64_t s64; // 有符号整形
double d; // 浮点型
} v;
struct dictEntry *next; //指向下一个哈希表节点
} dictEntry;
如下所示,dictEntry就类似于HashMap中的链表节点;而dictht则类似于HashMap。dictEntry作为一个节点,它持有key和value,以及next节点。
(3)redis字典
前面我们提到键值对是通过redis字典Dict来存储的。Dict的存储结构如下
/* 字典结构定义 */
typedef struct dict {
dictType *type; // 字典类型
void *privdata; // 私有数据
dictht ht[2]; // 哈希表[两个]
long rehashidx; // 记录rehash 进度的标志,值为-1表示rehash未进行
int iterators; // 当前正在迭代的迭代器数
} dict;
注意redis的字典里面有两个dictht,也就是哈希表。其中一个表是用来存储键值对信息,如前面部分所述;而第二个表则是为了字典的扩展rehash而用的。另外,还有一个标志位是用来记录rehash的进度。

总结一下,
在集群模式下,一个redis实例对应一个RedisDB(db0);而一个redisDB则对应一个Dict字典;一个Dict则对应2个哈希表Dictht,其中正常情况下只用到ht[0],在rehash时还会使用到ht[1]。
注意,redis实例是整体上作为一个字典来使用的(db0);一个实例对应多个dbx一般不推荐使用。故一个redis实例的信息就存储到一个完整的hash表中。
2. redis添加一个新键值对的过程

源码:
/* 添加新键值对 */
int dictAdd(dict *d, void *key, void *val){
dictEntry *entry = dictAddRaw(d,key); // 添加新键
if (!entry) return DICT_ERR; // 如果键存在,则返回失败
dictSetVal(d, entry, val); // 键不存在,则设置节点值
return DICT_OK;
}
/* 将Key插入哈希表 */
dictEntry *dictAddRaw(dict *d, void *key){
int index;
dictEntry *entry;
dictht *ht;
if (dictIsRehashing(d)) _dictRehashStep(d); // 如果哈希表在rehashing,则执行单步rehash
/* 调用_dictKeyIndex() 检查键是否存在,如果存在则返回NULL */
if ((index = _dictKeyIndex(d, key)) == -1)
return NULL;
//如果当前是在rehash中,就直接插入到新的rehash的表中的了
ht = dictIsRehashing(d) ? &d->ht[1] : &d->ht[0];
entry = zmalloc(sizeof(*entry)); // 为新增的节点分配内存
entry->next = ht->table[index]; // 将节点插入链表表头
ht->table[index] = entry; // 更新节点和桶信息
ht->used++; // 更新ht的used
/* 设置新节点的键 */
dictSetKey(d, entry, key);
return entry;
}
/* 计算存储Key的bucket的位置 */
static int _dictKeyIndex(dict *d, const void *key) {
unsigned int h, idx, table;
dictEntry *he;
/* 检查是否需要扩展哈希表,不足则扩展 */
if (_dictExpandIfNeeded(d) == DICT_ERR)
return -1;
/* 计算Key的哈希值 */(先从ht[0]找,找不到的话分两种情况:1)此时不在rehash中就直接返回,2}在rehash中再去ht[1]上找)
h = dictHashKey(d, key);
for (table = 0; table <= 1; table++) {
idx = h & d->ht[table].sizemask; //计算Key的bucket位置
/* 检查节点上是否存在新增的Key */
he = d->ht[table].table[idx];
/* 在节点链表检查 */
while(he) {
if (key==he->key || dictCompareKeys(d, key, he->key))
return -1;
he = he->next;
}
if (!dictIsRehashing(d)) break; // 扫完ht[0]后,如果哈希表不在rehashing,则无需再扫ht[1]
}
return idx;
}
备注: Redis 通过 dictCreate() 创建词典,在初始化中,table 指针为 Null,所以两个哈希表 ht[0].table 和 ht[1].table 都未真正分配内存空间。只有在 dictExpand() 字典扩展时才给 table 分配指向 dictEntry 的内存。
当 Redis 触发 Resize 后,就会动态分配一块内存,最终由 ht[1].table 指向,动态分配的内存大小为:realsize*sizeof(dictEntry*),table 指向 dictEntry* 的一个指针,大小为 8bytes(64 位OS),即 ht[1].table 需分配的内存大小为:8*2*2^n (n 大于等于 2)。
3. redis rehash过程
在hashmap中,由于hash冲突导致负载因子超出某个阈值时,处于链表性能的考虑,会进行resize过程。Redis也一样,它是通过dictExpand()实现。
/* 根据相关触发条件扩展字典 */
static int _dictExpandIfNeeded(dict d){
if (dictIsRehashing(d)) return DICT_OK; // 如果正在进行Rehash,则直接返回
if (d->ht[0].size == 0) return dictExpand(d, DICT_HT_INITIAL_SIZE); // 如果ht[0]字典为空,则创建并初始化ht[0]
/ (ht[0].used/ht[0].size)>=1前提下,当满足dict_can_resize=1或ht[0].used/t[0].size>5时,便对字典进行扩展 /
if (d->ht[0].used >= d->ht[0].size &&
(dict_can_resize ||
d->ht[0].used/d->ht[0].size > dict_force_resize_ratio))
{
return dictExpand(d, d->ht[0].used2); // 扩展字典为原来的2倍
}
return DICT_OK;
}
大概流程如下:
如果dict正在hash(rehashidx作为状态位来标记的),就直接返回;
如果当前dict是空的,那么久初始化ht[0],这和hashMap一致都是创建的时候没有初始化,第一次放入设备时再初始化;
扩容条件:在ht[0]这个哈希表used数目>= size的前提下,下面两个条件都可以导致扩容:dict表可以扩容; used数目是size的5倍以上
此时,会按照ht[0]的used数量扩展为2倍
具体的扩容函数dictExpand如下,其中d为原哈希表,size是期待的扩容值,实际上会取第一个大于等于size的2的n次方作为真正的扩容值
int dictExpand(dict *d, unsigned long size){
dictht n; // 新哈希表
unsigned long realsize = _dictNextPower(size); // 计算扩展或缩放新哈希表的大小,这里也是类似于hashmap的取第一个大于等于size的2的n次方
/* 如果正在rehash或者新哈希表的大小小于现已使用(比如某个表刚刚扩容后了),则返回error */
if (dictIsRehashing(d) || d->ht[0].used > size)
return DICT_ERR;
/* 如果计算出哈希表size与现哈希表大小一样,也返回error */
if (realsize == d->ht[0].size) return DICT_ERR;
/* 初始化新哈希表 */
n.size = realsize;
n.sizemask = realsize-1;
n.table = zcalloc(realsize*sizeof(dictEntry*)); // 为table指向dictEntry 分配内存
n.used = 0;
/* 如果ht[0] 为空,则初始化ht[0]为当前键值对的哈希表。这个应该是第一次初始化吧 */
if (d->ht[0].table == NULL) {
d->ht[0] = n;
return DICT_OK;
}
/* 如果ht[0]不为空,则初始化ht[1]为当前键值对的哈希表,并开启渐进式rehash模式 */
d->ht[1] = n;
d->rehashidx = 0;
return DICT_OK;
}
d->rehashidx = 0; rehashidx是是否在rehash的标志位,为-1代表未rehash;为1代表正在hash中。
注意,在每次将key插入到哈希表中时,会调用_dictKeyIndex方法计算存储key的bucket桶的位置,在该方法中,还会调用_dictExpandIfNeeded方法检查是否需要扩展哈希表。然后再插入新的节点。(hashmap是先插入,再扩容)
注意,在rehash过程中,新的hash表是存到ht[1]中的
4)rehash中的渐进式rehash
/* Performs N steps of incremental rehashing. Returns 1 if there are still
-
keys to move from the old to the new hash table, otherwise 0 is returned.
-
Note that a rehashing step consists in moving a bucket (that may have more
-
than one key as we use chaining) from the old to the new hash table, however
-
since part of the hash table may be composed of empty spaces, it is not
-
guaranteed that this function will rehash even a single bucket, since it
-
will visit at max N*10 empty buckets in total, otherwise the amount of
-
work it does would be unbound and the function may block for a long time. /
int dictRehash(dict d, int n) {
int empty_visits = n10; / Max number of empty buckets to visit. */
if (!dictIsRehashing(d)) return 0;while(n-- && d->ht[0].used != 0) {
dictEntry *de, *nextde;/* Note that rehashidx can't overflow as we are sure there are more * elements because ht[0].used != 0 */ assert(d->ht[0].size > (unsigned long)d->rehashidx); while(d->ht[0].table[d->rehashidx] == NULL) { d->rehashidx++; if (--empty_visits == 0) return 1; } de = d->ht[0].table[d->rehashidx]; /* Move all the keys in this bucket from the old to the new hash HT */ while(de) { uint64_t h; nextde = de->next; /* Get the index in the new hash table */ h = dictHashKey(d, de->key) & d->ht[1].sizemask; de->next = d->ht[1].table[h]; d->ht[1].table[h] = de; d->ht[0].used--; d->ht[1].used++; de = nextde; } d->ht[0].table[d->rehashidx] = NULL; d->rehashidx++;}
/* Check if we already rehashed the whole table… */
if (d->ht[0].used == 0) {
zfree(d->ht[0].table);
d->ht[0] = d->ht[1];
_dictReset(&d->ht[1]);
d->rehashidx = -1;
return 0;
}/* More to rehash… */
return 1;
}
Rehash是以bucket为单位进行渐进式数据迁移的,每一次只完成一个桶的迁移(retrun 1),然后继续下一个桶,一直到迁移掉每一个桶(return 0)。一个桶就是哈希表数组的一个entry链。
深扒一下这个函数的具体实现。
判断dict是否正在rehashing,只有是,才能继续往下进行,否则已经结束哈希过程,直接返回。
接着是分n步进行的渐进式哈希主体部分(n由函数参数传入),在while的条件里面加入对.used旧表中剩余元素数目的观察,增加安全性。
一个runtime的断言保证一下渐进式哈希的索引没有越界。
接下来一个小while是为了跳过空桶,同时更新剩余可以访问的空桶数,empty_visits这个变量的作用之前已经说过了。
**现在我们来到了当前的bucket,在下一个while(de)中把其中的所有元素都迁移到ht[1]中,**索引值是辅助了哈希表的大小掩码计算出来的,可以保证不会越界。同时更新了两张表的当前元素数目。
每一步rehash结束,都要增加索引值,并且把旧表中已经迁移完毕的bucket置为空指针。
最后判断一下旧表是否全部迁移完毕,若是,则回收空间,重置旧表,重置渐进式哈希的索引,否则用返回值告诉调用方,dict内仍然有数据未迁移。
**渐进式哈希的精髓在于:数据的迁移不是一次性完成的,而是可以通过dictRehash()这个函数分步规划的,并且调用方可以及时知道是否需要继续进行渐进式哈希操作。**如果dict数据结构中存储了海量的数据,那么一次性迁移势必带来redis性能的下降,别忘了redis是单线程模型,在实时性要求高的场景下这可能是致命的。而渐进式哈希则将这种代价可控地分摊了,调用方可以在dict做插入,删除,更新的时候执行dictRehash(),最小化数据迁移的代价。
在迁移的过程中,数据在新表还是旧表中并不是一个很急迫的需求,因为迁移的过程中并不会丢数据(程序中是先去ht[0]中找,如果此时处于迁移中还要继续去ht[1]中找)。
所以我们有时候在程序中可以看到一个所谓的单步rehash,就是执行一次操作,而不是全部迁移。
https://blog.csdn.net/cqk0100/article/details/80400811
最后是从《Redis设计与实现》中copy来的图解,可以帮助大家更形象地理解整个incremental rehash的过程:





