1、 状态机设计
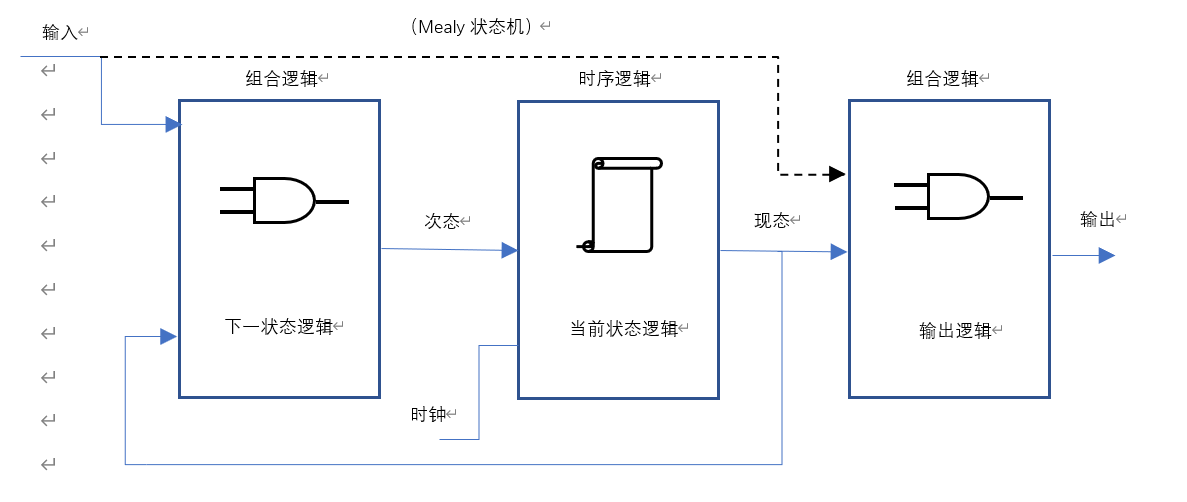
状态机是许多数字系统的核心部件,是一类重要的时序电路。通常包括三个部分:一是下一个状态的逻辑电路,二是存储状态机当前状态的时序逻辑电路,三是输出组合逻辑电路。通常,状态机的状态数量有限,称为有限状态机(FSM)。由于状态机所有触发器的时钟由同一脉冲边沿触发,故也称之为同步状态机。
根据状态机的输出信号是否与电路的输入有关分为Mealy型状态机和Moore型状态机。电路的输入信号不仅与电路的当前状态有关,还与电路的输入有关,成为Mealy型状态机,即次态=f(现状,输入),输出=(现状,输入);而电路的输出仅仅与各触发器的状态,不受电路输入信号影响或无输入,成为Moore型状态机,即次态=f(现状,输入),输出=f(现状)。其标准模型如下:
状态机的描述通常有三种方法,称为一段式状态机,二段式状态机和三段式状态机。状态机的描述通常包含以下四部分:
1) 利用参数定义语句parameter描述状态机各个状态名称,即状态编码。状态机通常有很多编码方法包含自然二进制编码,One-hot编码,格雷编码等;
2) 用时序的always块描述状态触发器实现状态存储;
3) 使用敏感表和case语句(也采用if-else等价语句)描述状态转换逻辑;
4) 描述状态机的输出逻辑。
2、 三种描述状态机方法的比较
一段式状态机
module detect_1(
input clk_i,
input rst_n_i,
output out_o
);
reg out_r;
//状态声明和状态编码
reg[1:0] state;
parameter [1:0] S0=2'b00;
parameter [1:0] S1=2'b01;
parameter [1:0] S2=2'b10;
parameter [1:0] S3=2'b11;
always@(posedge clk_i)
begin
if(!rst_n_i)begin
state<=0;
out_r<=1'b0;
end
else
case(state)
S0:
begin
out_r<=1'b0;
state<=S1;
end
S1:
begin
out_r<=1'b1;
state<=S2;
end
S2:
begin
out_r<=1'b0;
state<=S3;
end
S3:
begin
out_r<=1'b1;
end
endcase
end
assign out_o=out_r;
endmodule
一段式状态机是应该避免使用的,该写法仅仅适用于非常简单的状态机设计,不符合组合逻辑与时序逻辑分开的原则,整个结构代码不清晰,不利于维护和修改。
两段式状态机
module detect_2(
input clk_i,
input rst_n_i,
output out_o
);
reg out_r;
//状态声明和状态编码
reg [1:0] Current_state;
reg [1:0] Next_state;
parameter [1:0] S0=2'b00;
parameter [1:0] S1=2'b01;
parameter [1:0] S2=2'b10;
parameter [1:0] S3=2'b11;
//时序逻辑:描述状态转换
always@(posedge clk_i)
begin
if(!rst_n_i)
Current_state<=0;
else
Current_state<=Next_state;
end
//组合逻辑:描述下一状态和输出
always@(*)
begin
case(Current_state)
S0:
begin
out_r=1'b0;
Next_state=S1;
end
S1:
begin
out_r=1'b1;
Next_state=S2;
end
S2:
begin
out_r=1'b0;
Next_state=S3;
end
S3:
begin
out_r=1'b1;
Next_state=Next_state;
end
endcase
end
assign out_o=out_r;
enmodule
两段式状态机采用两个always模块实现状态机的功能,其中一个always采用同步时序逻辑描述状态转移,另一个always采用组合逻辑来判断状态条件转移。两段式状态机是推荐的状态机设计方法。
三段式状态机
module detect_3(
input clk_i,
input rst_n_i,
output out_o
);
reg out_r;
//状态声明和状态编码
reg [1:0] Current_state;
reg [1:0] Next_state;
parameter [1:0] S0=2'b00;
parameter [1:0] S1=2'b01;
parameter [1:0] S2=2'b10;
parameter [1:0] S3=2'b11;
//时序逻辑,描述状态转换
always@(posedge clk_i)
begin
if(!rst_n_i)
Current_state<=0;
else
Current_state<=Next_state;
end
//组合逻辑:描述下一状态
always@(*)
begin
case(Current_state)
S0:
Next_state=S1;
S1:
Next_state=S2;
S2:
Next_state=S3;
S3:
Next_state=Next_state;
default:
Next_state=S0;
endcase
end
//输出逻辑:让输出out,经过寄存器out_r锁存后输出,消除毛刺
always@(*)
begin
case(Current_state)
S0,S2:
out_r<=1'b0;
S1,S3:
out_r<=1'b1;
default:
out_r<=out_r;
endcase
end assign out_o=out_r;
三段式状态机在第一个always模块采用同步时序逻辑方式描述状态转换,第二个always模块采用组合逻辑方式描述状态转换规律,第三个always描述电路的输出。通常让输出信号经过寄存及缓存后再输出,消除电路毛刺。这种状态机也是比较推崇的,主要由于维护方便,组合逻辑与时序逻辑完全独立。
一段式状态机、二段式状态机、三段式状态机对应的时序图如下:
