roslaunch turtlebot_gazebo turtlebot_world.launch roslaunch turtlebot_teleop keyboard_teleop.launch roslaunch turtlebot_gazebo gmapping_demo.launch roslaunch turtlebot_rviz_launchers view_navigation.launch
补充:首先先试试看能否运行以上命令,不能的话就安装相应的包吧。
参考文章:
http://blog.csdn.net/qq_36355662/article/details/61413860
http://blog.csdn.net/qq_36355662/article/details/61616513
http://blog.csdn.net/changer_sun/article/details/79264388
上一篇博客建图时打开rviz会造成gazeon进程中断,因此干脆另外使用激光传感器hokuyo与kinect共存
为方便日后使用,将所有/opt/ros/kinetic/share下有修改的代码都另建一份,放在工作空间的pkg下。
文末尾上传了代码,实现gazeon下的建图仿真
有修改的软件包如下:
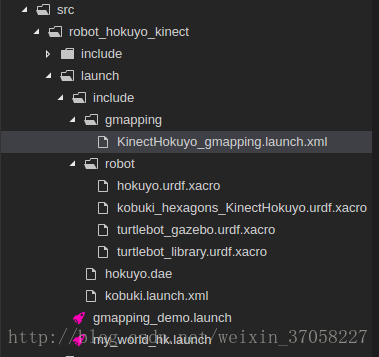
即上图显示的程序都需要修改;下面贴出代码:
file: my_world_hk.launch
<launch>
<arg name="world_file" default="$(env TURTLEBOT_GAZEBO_WORLD_FILE)"/>
<arg name="base" value="$(optenv TURTLEBOT_BASE kobuki)"/> <!-- create, roomba -->
<arg name="battery" value="$(optenv TURTLEBOT_BATTERY /proc/acpi/battery/BAT0)"/> <!-- /proc/acpi/battery/BAT0 -->
<arg name="gui" default="true"/>
<arg name="stacks" value="$(optenv TURTLEBOT_STACKS hexagons)"/> <!-- circles, hexagons -->
<!--arg name="3d_sensor" value="$(optenv TURTLEBOT_3D_SENSOR kinect)"/--> <!-- kinect, asus_xtion_pro -->
<arg name="3d_sensor" value="$(optenv TURTLEBOT_3D_SENSOR KinectHokuyo)"/> <!-- kinect, asus_xtion_pro -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="use_sim_time" value="true"/>
<arg name="debug" value="false"/>
<arg name="gui" value="$(arg gui)" />
<arg name="world_name" value="$(arg world_file)"/>
</include>
<!--include file="$(find turtlebot_gazebo)/launch/includes/$(arg base).launch.xml"-->
<include file="/home/jk/ros_sim/src/robot_hokuyo_kinect/launch/include/$(arg base).launch.xml">
<arg name="base" value="$(arg base)"/>
<arg name="stacks" value="$(arg stacks)"/>
<arg name="3d_sensor" value="$(arg 3d_sensor)"/>
</include>
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher">
<param name="publish_frequency" type="double" value="30.0" />
</node>
<!-- Fake laser -->
<node pkg="nodelet" type="nodelet" name="laserscan_nodelet_manager" args="manager"/>
<node pkg="nodelet" type="nodelet" name="depthimage_to_laserscan"
args="load depthimage_to_laserscan/DepthImageToLaserScanNodelet laserscan_nodelet_manager">
<param name="scan_height" value="10"/>
<param name="output_frame_id" value="/camera_depth_frame"/>
<param name="range_min" value="0.45"/>
<remap from="image" to="/camera/depth/image_raw"/>
<remap from="scan" to="/scan"/>
</node>
</launch>
file:kobuki.launch.xml
<launch>
<arg name="base"/>
<arg name="stacks"/>
<arg name="3d_sensor"/>
<arg name="urdf_file" default="$(find xacro)/xacro.py '/home/jk/ros_sim/src/robot_hokuyo_kinect/launch/include/robot/$(arg base)_$(arg stacks)_$(arg 3d_sensor).urdf.xacro'" />
<param name="robot_description" command="$(arg urdf_file)" />
<!--<arg name="urdf_file" default="$(find xacro)/xacro.py '$(find turtlebot_description)/robots/$(arg base)_$(arg stacks)_$(arg 3d_sensor).urdf.xacro'"/>-->
<!-- Gazebo model spawner -->
<node name="spawn_turtlebot_model" pkg="gazebo_ros" type="spawn_model"
args="$(optenv ROBOT_INITIAL_POSE) -unpause -urdf -param robot_description -model mobile_base"/>
<!-- Velocity muxer -->
<node pkg="nodelet" type="nodelet" name="mobile_base_nodelet_manager" args="manager"/>
<node pkg="nodelet" type="nodelet" name="cmd_vel_mux"
args="load yocs_cmd_vel_mux/CmdVelMuxNodelet mobile_base_nodelet_manager">
<param name="yaml_cfg_file" value="$(find turtlebot_bringup)/param/mux.yaml" />
<remap from="cmd_vel_mux/output" to="mobile_base/commands/velocity"/>
</node>
<!-- Bumper/cliff to pointcloud (not working, as it needs sensors/core messages) -->
<include file="$(find turtlebot_bringup)/launch/includes/kobuki/bumper2pc.launch.xml"/>
</launch>
file:hokuyo.dae (此文件实际需要下载model,下载方式如下)
以下是要放到robot文件夹下的代码
cd ~/.gazebo/models wget -q -R *index.html*,*.tar.gz --no-parent -r -x -nH http://models.gazebosim.org/hokuyo/
file:turtlebot_library.urdf.xacro
<?xml version="1.0"?>
<!--
The complete turtlebot library of xacros for easy reference
-->
<robot xmlns:xacro="http://ros.org/wiki/xacro">
<!-- General -->
<xacro:include filename="$(find turtlebot_description)/urdf/common_properties.urdf.xacro"/>
<xacro:include filename="$(find turtlebot_description)/urdf/turtlebot_properties.urdf.xacro"/>
<!-- Bases -->
<xacro:include filename="$(find create_description)/urdf/create.urdf.xacro"/>
<xacro:include filename="$(find kobuki_description)/urdf/kobuki.urdf.xacro" />
<!-- Stacks -->
<xacro:include filename="$(find turtlebot_description)/urdf/stacks/circles.urdf.xacro"/>
<xacro:include filename="$(find turtlebot_description)/urdf/stacks/hexagons.urdf.xacro"/>
<!-- 3D Sensors -->
<xacro:include filename="$(find turtlebot_description)/urdf/sensors/kinect.urdf.xacro"/>
<xacro:include filename="$(find turtlebot_description)/urdf/sensors/asus_xtion_pro.urdf.xacro"/>
<xacro:include filename="$(find turtlebot_description)/urdf/sensors/asus_xtion_pro_offset.urdf.xacro"/>
<xacro:include filename="$(find turtlebot_description)/urdf/sensors/astra.urdf.xacro"/>
<xacro:include filename="$(find turtlebot_description)/urdf/sensors/r200.urdf.xacro"/>
<!--修改-->
<xacro:include filename="/home/jk/ros_sim/src/robot_hokuyo_kinect/launch/include/robot/hokuyo.urdf.xacro"/>
</robot>
file:turtlebot_gazebo.urdf.xacro
<?xml version="1.0"?>
<robot name="turtlebot_gazebo" xmlns:xacro="http://ros.org/wiki/xacro">
<!-- Microsoft Kinect / ASUS Xtion PRO Live for simulation -->
<xacro:macro name="turtlebot_sim_3dsensor">
<gazebo reference="camera_link">
<sensor type="depth" name="camera">
<always_on>true</always_on>
<update_rate>20.0</update_rate>
<camera>
<horizontal_fov>${60.0*M_PI/180.0}</horizontal_fov>
<image>
<format>B8G8R8</format>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.05</near>
<far>8.0</far>
</clip>
</camera>
<plugin name="kinect_camera_controller" filename="libgazebo_ros_openni_kinect.so">
<cameraName>camera</cameraName>
<alwaysOn>true</alwaysOn>
<updateRate>10</updateRate>
<imageTopicName>rgb/image_raw</imageTopicName>
<depthImageTopicName>depth/image_raw</depthImageTopicName>
<pointCloudTopicName>depth/points</pointCloudTopicName>
<cameraInfoTopicName>rgb/camera_info</cameraInfoTopicName>
<depthImageCameraInfoTopicName>depth/camera_info</depthImageCameraInfoTopicName>
<frameName>camera_depth_optical_frame</frameName>
<baseline>0.1</baseline>
<distortion_k1>0.0</distortion_k1>
<distortion_k2>0.0</distortion_k2>
<distortion_k3>0.0</distortion_k3>
<distortion_t1>0.0</distortion_t1>
<distortion_t2>0.0</distortion_t2>
<pointCloudCutoff>0.4</pointCloudCutoff>
</plugin>
</sensor>
</gazebo>
</xacro:macro>
<span style="color:#FF0000;">
<span style="color:#000000;">
<xacro:macro name="turtlebot_sim_2dsensor">
<gazebo reference="hokuyo_link">
<sensor type="ray" name="head_hokuyo_sensor">
<pose>0 0 0 0 0 0</pose>
<visualize>false</visualize>
<update_rate>40</update_rate>
<ray>
<scan>
<horizontal>
<samples>720</samples>
<resolution>1</resolution>
<min_angle>-1.570796</min_angle>
<max_angle>1.570796</max_angle>
</horizontal>
</scan>
<range>
<min>0.10</min>
<max>30.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>gaussian</type>
<!-- Noise parameters based on published spec for Hokuyo laser
achieving "+-30mm" accuracy at range < 10m. A mean of 0.0m and
stddev of 0.01m will put 99.7% of samples within 0.03m of the true
reading. -->
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="gazebo_ros_head_hokuyo_controller" filename="libgazebo_ros_laser.so">
<topicName>/turtlebot/laser/scan</topicName>
<frameName>hokuyo_link</frameName>
</plugin>
</sensor>
</gazebo>
</xacro:macro></span></span>
</robot>
file:kobuki_hexagons_KinectHokuyo.urdf.xacro
<?xml version="1.0"?>
<!--
- Base : kobuki
- Stacks : hexagons
- 3d Sensor : kinect+hokuyo
-->
<robot name="turtlebot" xmlns:xacro="http://ros.org/wiki/xacro">
<!--修改-->
<xacro:include filename="/home/jk/ros_sim/src/robot_hokuyo_kinect/launch/include/robot/turtlebot_library.urdf.xacro" />
<xacro:include filename="$(find kobuki_description)/urdf/kobuki.urdf.xacro" />
<xacro:include filename="$(find turtlebot_description)/urdf/stacks/hexagons.urdf.xacro"/>
<xacro:include filename="$(find turtlebot_description)/urdf/sensors/kinect.urdf.xacro"/>
<!--修改-->
<xacro:include filename="/home/jk/ros_sim/src/robot_hokuyo_kinect/launch/include/robot/hokuyo.urdf.xacro"/>
<kobuki/>
<stack_hexagons parent="base_link"/>
<sensor_kinect parent="base_link"/>
<sensor_hokuyo parent="base_link"/>
</robot>
file:hokuyo.urdf.xacro
下面这条代码需要根据实际路径做具体修改!!!!!!!
<mesh filename="package://turtlebot_description/meshes/sensors/hokuyo.dae"/>
<?xml version="1.0"?>
<!-- script_version=1.1 -->
<robot name="sensor_hokuyo" xmlns:xacro="http://ros.org/wiki/xacro">
<xacro:include filename="/home/jk/ros_sim/src/robot_hokuyo_kinect/launch/include/robot/turtlebot_gazebo.urdf.xacro"/>
<xacro:include filename="$(find turtlebot_description)/urdf/turtlebot_properties.urdf.xacro"/>
<!-- RPLidar 2D LIDAR -->
<xacro:macro name="sensor_hokuyo" params="parent">
<joint name="laser" type="fixed">
<origin xyz="0.10 0 0.435" rpy="0 0.0 0.0" />
<parent link="base_link" />
<child link="hokuyo_link" />
</joint>
<!-- Hokuyo Laser -->
<link name="hokuyo_link">
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.1"/>
</geometry>
</collision>
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<mesh filename="package://turtlebot_description/meshes/sensors/hokuyo.dae"/>
</geometry>
</visual>
<inertial>
<mass value="1e-5" />
<origin xyz="0 0 0" rpy="0 0 0"/>
<inertia ixx="1e-6" ixy="0" ixz="0" iyy="1e-6" iyz="0" izz="1e-6" />
</inertial>
</link>
<!-- Set up laser gazebo details -->
<turtlebot_sim_2dsensor/>
</xacro:macro>
</robot>
以下文件和gmapping有关
file:gmapping_demo.launch (用于建立地图 )
<launch> <arg name="3d_sensor" default="$(env TURTLEBOT_3D_SENSOR)"/> <!-- r200, kinect, asus_xtion_pro --> <arg name="custom_gmapping_launch_file" default="/home/jk/ros_sim/src/robot_hokuyo_kinect/launch/include/gmapping/$(arg 3d_sensor)_gmapping.launch.xml"/> <include file="$(arg custom_gmapping_launch_file)"/> </launch>
gmapping文件夹下file: KinectHokuyo_gmapping.launch.xml
<launch>
<!--<arg name="scan_topic" default="scan" />-->
<arg name="scan_topic" default="/turtlebot/laser/scan" />
<arg name="base_frame" default="base_footprint"/>
<arg name="odom_frame" default="odom"/>
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<param name="base_frame" value="$(arg base_frame)"/>
<param name="odom_frame" value="$(arg odom_frame)"/>
<param name="map_update_interval" value="5.0"/>
<param name="maxUrange" value="6.0"/>
<param name="maxRange" value="8.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="minimumScore" value="200"/>
<param name="srr" value="0.01"/>
<param name="srt" value="0.02"/>
<param name="str" value="0.01"/>
<param name="stt" value="0.02"/>
<param name="linearUpdate" value="0.5"/>
<param name="angularUpdate" value="0.436"/>
<param name="temporalUpdate" value="-1.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="80"/>
<!--
<param name="xmin" value="-50.0"/>
<param name="ymin" value="-50.0"/>
<param name="xmax" value="50.0"/>
<param name="ymax" value="50.0"/>
make the starting size small for the benefit of the Android client's memory...
-->
<param name="xmin" value="-1.0"/>
<param name="ymin" value="-1.0"/>
<param name="xmax" value="1.0"/>
<param name="ymax" value="1.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
<remap from="scan" to="$(arg scan_topic)"/>
</node>
</launch>
注意在~/.bashrc中添加以下内容:
source /home/jk/ros_sim/devel/setup.bash export TURTLEBOT_BASE=kobuki export TURTLEBOT_STACKS=hexagons export TURTLEBOT_3D_SENSOR=KinectHokuyo
分别在终端运行:
roslaunch robot_hokuyo_kinect my_world_hk.launch roslaunch robot_hokuyo_kinect gmapping_demo.launch roslaunch turtlebot_rviz_launchers view_navigation.launch roslaunch turtlebot_teleop keyboard_teleop.launch
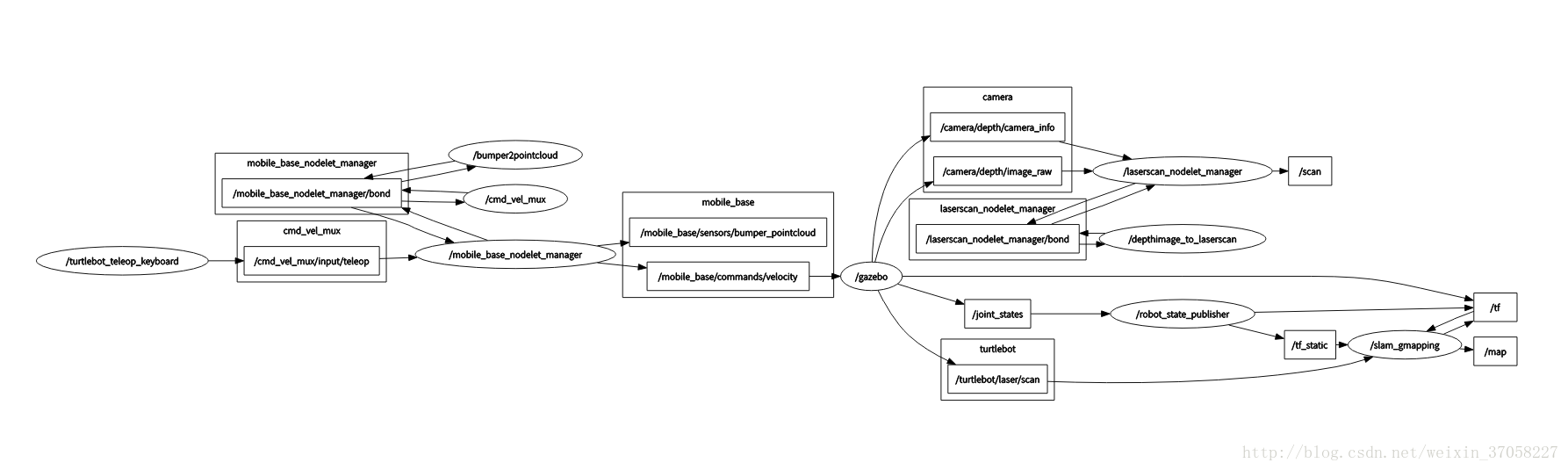
运行 rqt_graph看到
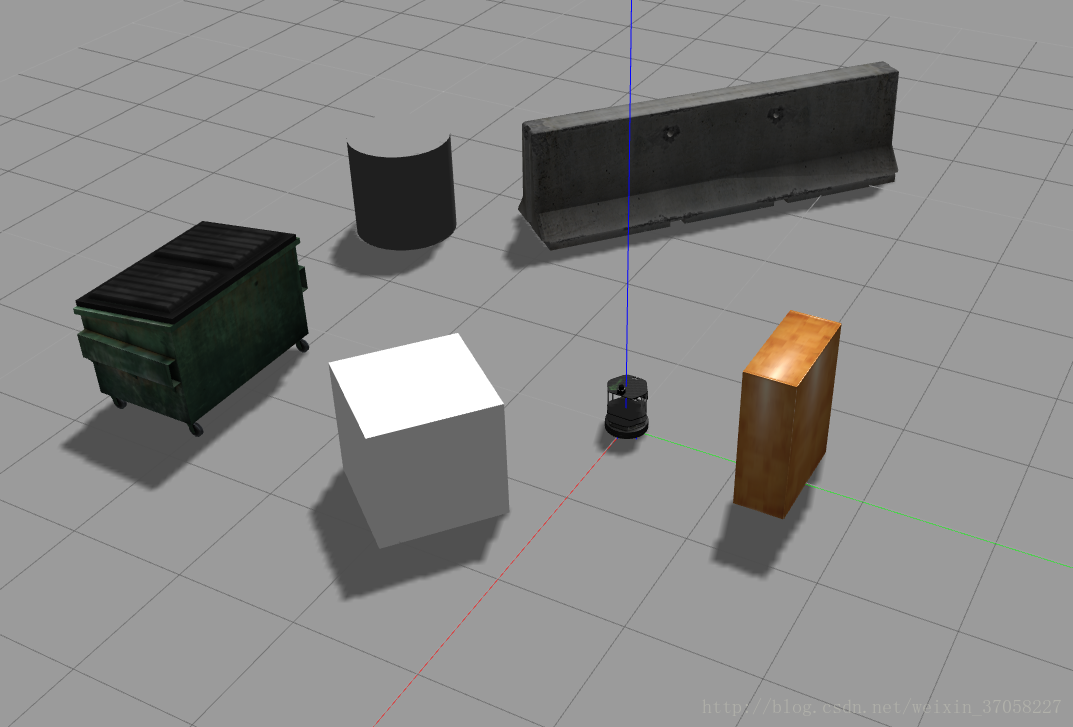
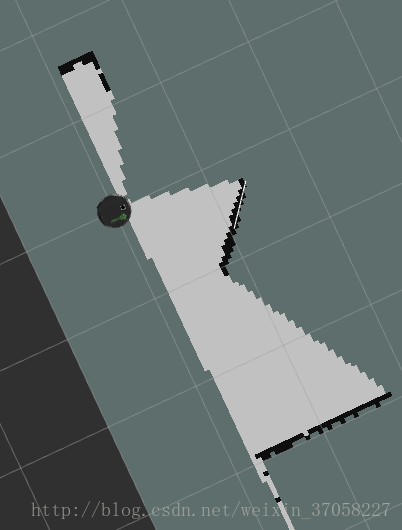
gazon和rviz效果图:
代码压缩包上传至博客 : ros_sim