layout: post
tags: [STM32]
comments: true
什么是正交解码?
对于常用增量式编码器,光学编码器,采用带槽圆盘,一侧是发射光线的发射端,而光电晶体管在相对的一侧。当圆盘转动时,光程被阻断,得到的脉冲指示轴的转动和方向。通常的说法是1000线的编码器,即转一圈会产生1000个方波脉冲,马盘上刻了1000个栅格,中间被镂了1000个空,举个例子,未免显得有点啰嗦,下面直奔主题,至于什么是编码器还是搜索引擎说的明明白白。
增量编码器通常有A,B两相信号,相位相差90°,所以也叫正交,还有一个复位信号是机械复位,即转了一圈,复位信号会有一个跳变沿。具体如下图所示:
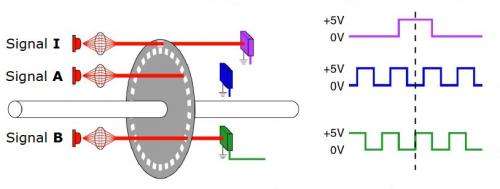
所以,正交解码,就是把解码A,B两相的方波信号,检测相位,以及脉冲数和转向,当然也可以计算出转速,加速度,以及转动到相应的位置。
编码器接口模式
参考《STM32 参考手册中文版》,可以看到,对于TIM定时器中通用的功能,普遍支持编码器接口模式,下面配合手册和标准库进行配置。
标准库接口
首先看到标准库的代码stm32f10x_tim.h中的接口,先简单分析以下源码,找到以下四个数据类型:
TIM_TimeBaseInitTypeDef:时基单位,配置定时器预分频参数,计数器模式(上溢/下溢),周期频率以及分频系数;TIM_OCInitTypeDef:振荡输出单元,可以用于产生PWM波形;TIM_ICInitTypeDef:输入捕获单元,可以用于检测编码器信号的输入;TIM_BDTRInitTypeDef:适用于TIM1和TIM8作为插入死区时间配置的结构体;
所以,综合以上,只需要关注时基单元和输入捕获单元即可,下面对于其成员的以及其注释做一下简单解释;
TIM_TimeBaseInitTypeDef
typedef struct
{
uint16_t TIM_Prescaler; /*!< Specifies the prescaler value used to divide the TIM clock.
This parameter can be a number between 0x0000 and 0xFFFF */
uint16_t TIM_CounterMode; /*!< Specifies the counter mode.
This parameter can be a value of @ref TIM_Counter_Mode */
uint16_t TIM_Period; /*!< Specifies the period value to be loaded into the active
Auto-Reload Register at the next update event.
This parameter must be a number between 0x0000 and 0xFFFF. */
uint16_t TIM_ClockDivision; /*!< Specifies the clock division.
This parameter can be a value of @ref TIM_Clock_Division_CKD */
uint8_t TIM_RepetitionCounter; /*!< Specifies the repetition counter value. Each time the RCR downcounter
reaches zero, an update event is generated and counting restarts
from the RCR value (N).
This means in PWM mode that (N+1) corresponds to:
- the number of PWM periods in edge-aligned mode
- the number of half PWM period in center-aligned mode
This parameter must be a number between 0x00 and 0xFF.
@note This parameter is valid only for TIM1 and TIM8. */
} TIM_TimeBaseInitTypeDef;
TIM_ICInitTypeDef
typedef struct
{
uint16_t TIM_Channel; /*!< Specifies the TIM channel.
This parameter can be a value of @ref TIM_Channel */
uint16_t TIM_ICPolarity; /*!< Specifies the active edge of the input signal.
This parameter can be a value of @ref TIM_Input_Capture_Polarity */
uint16_t TIM_ICSelection; /*!< Specifies the input.
This parameter can be a value of @ref TIM_Input_Capture_Selection */
uint16_t TIM_ICPrescaler; /*!< Specifies the Input Capture Prescaler.
This parameter can be a value of @ref TIM_Input_Capture_Prescaler */
uint16_t TIM_ICFilter; /*!< Specifies the input capture filter.
This parameter can be a number between 0x0 and 0xF */
} TIM_ICInitTypeDef;
寄存器接口
配置寄存器,可以直接参考《STM32 参考手册中文版》的十三章的编码器接口模式,详细内容可以参考一下手册,这里结合前面标准库的结构体,将重点的内容做一下提炼,编码器接口大概需要进行以下几项的配置:
- 编码器接口模式的配置:
- 上升沿触发
- 下降沿触发
- 跳变沿触发
- 极性配置
- 滤波器配置
以下是官方给出的配置方案:
● CC1S=’01’ (TIMx_CCMR1寄存器, IC1FP1映射到TI1)
● CC2S=’01’ (TIMx_CCMR2寄存器, IC2FP2映射到TI2)
● CC1P=’0’ (TIMx_CCER寄存器, IC1FP1不反相, IC1FP1=TI1)
● CC2P=’0’ (TIMx_CCER寄存器, IC2FP2不反相, IC2FP2=TI2)
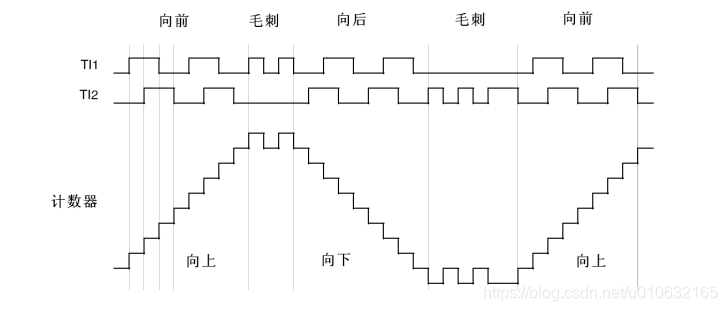
● SMS=’011’ (TIMx_SMCR寄存器,所有的输入均在上升沿和下降沿有效).
● CEN=’1’ (TIMx_CR1寄存器,计数器使能)
这意味着计数器TIMx_CNT寄存器只在0到TIMx_ARR寄存器的自动装载值之间连续计数(根据方向,或是0到ARR计数,或是ARR到0计
数)。具体如下图所示;
检测方法
综上所述,如果想得到转速,和方向:
- 在间隔固定时间
Ts,读取TIMx_CNT寄存器的值,假设是1000线的编码器,转速:n = 1/Ts*TIMx_CNT*1000; - 根据
TIMx_CNT的计数方向判断转向,不同极性,TIMx_CNT增长方向也不同,这里要加以区分;
标准库配置
下面是基于标准库V3.5的代码,基于STM32F103系列的单片机,硬件接口:
TIM3通道1,Pin6和Pin7;- 机械复位信号;
可以通过encoder_get_signal_cnt接口读取当前编码的脉冲数,采用M法测速;
关于计数器溢出的情况
TIM3_IRQHandler中断通过判断SR寄存器中的上溢和下溢标志位,检测定时器可能溢出的方向,通过N做一个补偿,encoder_get_signal_cnt中未考虑到定时器溢出的情况;
#ifndef ENCODER_H
#define ENCODER_H
#include <stdint.h>
/*
QPEA--->PA6/TIM3C1
QPEB--->PA7/TIM3C1
---------------------------
TIM3_UPDATE_IRQ
EXTI_PA5
---------------------------
*/
typedef enum{
FORWARD = 0,
BACK
}MOTO_DIR;
/**
* @brief init encoder pin for pha phb and zero
* and interrpts
*/
void encoder_init(void);
/**
* @brief get encoder capture signal counts
*/
int32_t encoder_get_signal_cnt(void);
/**
* @brief get encoder running direction
*/
MOTO_DIR encoder_get_motor_dir(void);
#endif
#include "encoder.h"
#include "stm32f10x.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_tim.h"
#include "stm32f10x_exti.h"
#include "misc.h"
#define SAMPLE_FRQ 10000L
#define SYS_FRQ 72000000L
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
volatile int32_t N = 0;
volatile uint32_t EncCnt = 0;
/* Private function prototypes -----------------------------------------------*/
/* Private functions ---------------------------------------------------------*/
static void encoder_pin_init(void){
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
static void encoder_rcc_init(void){
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
}
static void encoder_tim_init(void){
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
TIM_TimeBaseStructure.TIM_Period = ENCODER_MAX_CNT;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseStructure.TIM_Prescaler = 0;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(TIM3,TIM_EncoderMode_TI12,
TIM_ICPolarity_Rising,
TIM_ICPolarity_Rising);
//must clear it flag before enabe interrupt
TIM_ClearFlag(TIM3,TIM_FLAG_Update);
TIM_ITConfig(TIM3,TIM_IT_Update, ENABLE);
//TIM_ITConfig(TIM3, TIM_IT_CC2, ENABLE);
TIM_SetCounter(TIM3,ENCODER_ZERO_VAL);
TIM_ICInit(TIM3, &TIM_ICInitStructure);
TIM_Cmd(TIM3, ENABLE);
// TIM3->CCMR1 |= 0x0001;
// TIM3->CCMR2 |= 0x0001;
// TIM3->CCER &= ~(0x0001<<1);
// TIM3->CCER &= ~(0x0001<<5);
// TIM3->SMCR |= 0x0003;
// TIM3->CR1 |= 0x0001;
}
/**
* @brief Configure the nested vectored interrupt controller.
* @param None
* @retval None
*/
static void encoder_irq_init(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;
/* Enable the TIM3 global Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource5);
EXTI_InitStructure.EXTI_Line = EXTI_Line5;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising;
EXTI_Init(&EXTI_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI9_5_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void encoder_init(void){
encoder_rcc_init();
encoder_pin_init();
encoder_irq_init();
encoder_tim_init();
}
// 机械复位信号
void EXTI9_5_IRQHandler(void){
if(EXTI_GetITStatus(EXTI_Line5) == SET){
}
EXTI_ClearITPendingBit(EXTI_Line5);
}
MOTO_DIR encoder_get_motor_dir(void)
{
if((TIM3->CR1 & 0x0010) == 0x0010){
return FORWARD;
}else{
return BACK;
}
}
int32_t encoder_get_signal_cnt(void){
int32_t cnt = 0;
if(TIM3->CNT > ENCODER_ZERO_VAL){
EncCnt = cnt = TIM3->CNT - ENCODER_ZERO_VAL;
}else{
EncCnt = cnt = ENCODER_ZERO_VAL - TIM3->CNT;
}
TIM_SetCounter(TIM3,ENCODER_ZERO_VAL);
return cnt;
}
/******************************************************************************/
/* STM32F10x Peripherals Interrupt Handlers */
/******************************************************************************/
/**
* @brief This function handles TIM3 global interrupt request.
* @param None
* @retval None
*/
void TIM3_IRQHandler(void)
{
uint16_t flag = 0x0001 << 4;
if(TIM3->SR&(TIM_FLAG_Update)){
//down mode
if((TIM3->CR1 & flag) == flag){
N--;
}else{
//up mode
N++;
}
}
TIM3->SR&=~(TIM_FLAG_Update);
}
TIM3 global interrupt request.
* @param None
* @retval None
*/
void TIM3_IRQHandler(void)
{
uint16_t flag = 0x0001 << 4;
if(TIM3->SR&(TIM_FLAG_Update)){
//down mode
if((TIM3->CR1 & flag) == flag){
N--;
}else{
//up mode
N++;
}
}
TIM3->SR&=~(TIM_FLAG_Update);
}
总结
本文实现了STM32编码器接口模式的配置以及编码器的M法测速,如果配合机械复位信号,可以通过编码器的脉冲数得到位置信息,转过多少度,但当前并未实现。
