原文:https://blog.csdn.net/soulmeetliang/article/details/89398412
背景
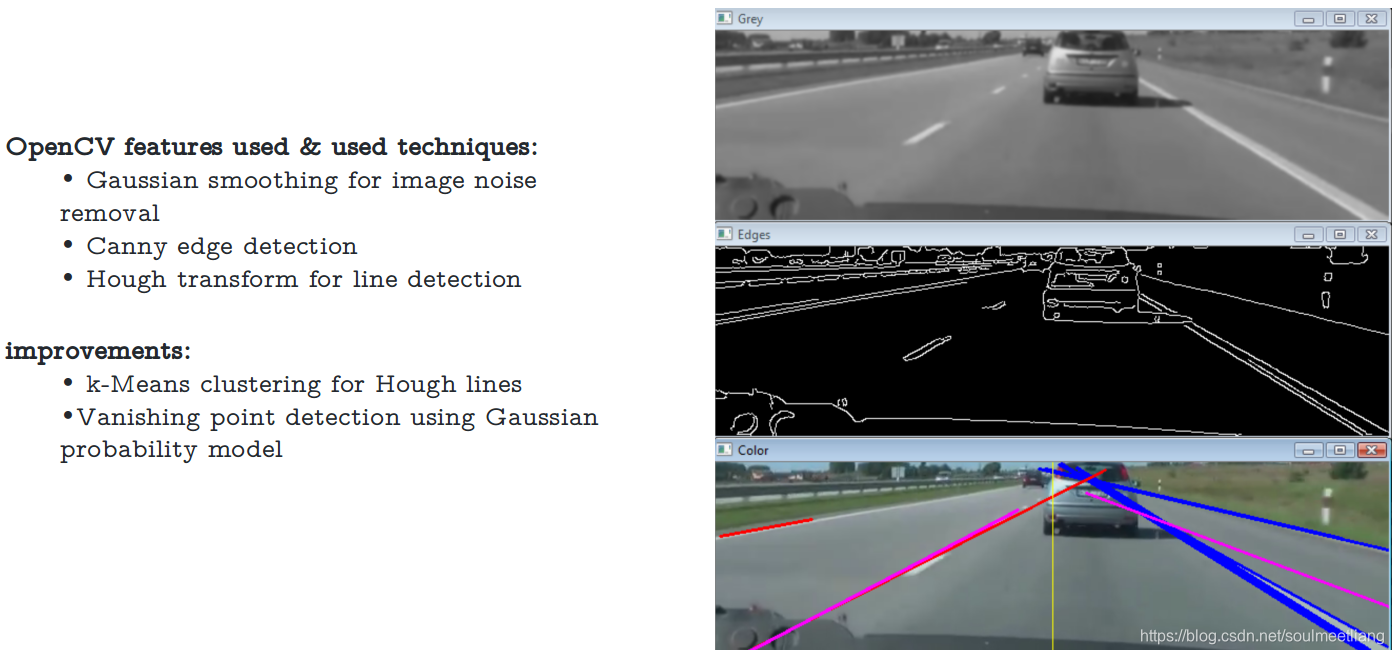
车道线检测作为自动驾驶领域的常规工作,在深度学习的浪潮中又有了很大的进步,在此分享我所做的调研工作,部分为ppt截图,为了方便请谅解。
车道线检测工作的局限性
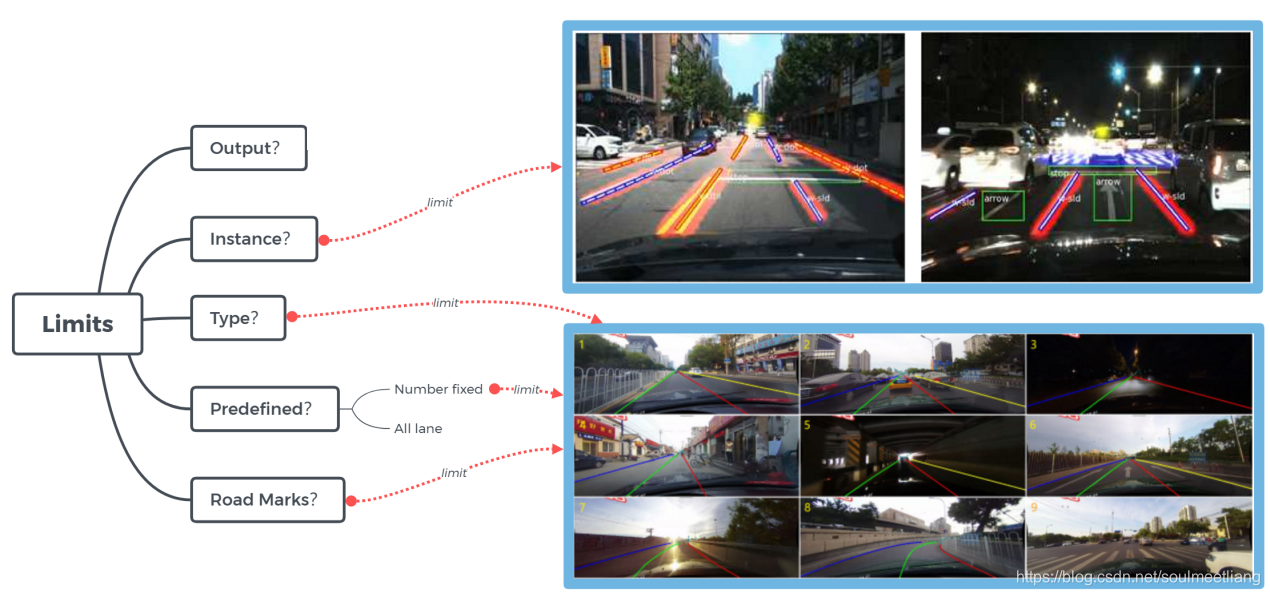 如上图所示,车道线检测工作的baseline并不明确,不同的方法与不同的场景应用都有各自的局限性。例如:
如上图所示,车道线检测工作的baseline并不明确,不同的方法与不同的场景应用都有各自的局限性。例如:
- 输出类型:mask掩码/点集/矢量线条
- 实例化:每个车道线是否形成实例
- 分类:是否对车道线进行了分类(单白、双黄等)
- 提前定义的参数:是否只能检测固定数量的车道线
- 车道标记:是否对车道上的行车标记也做了检测
性能指标
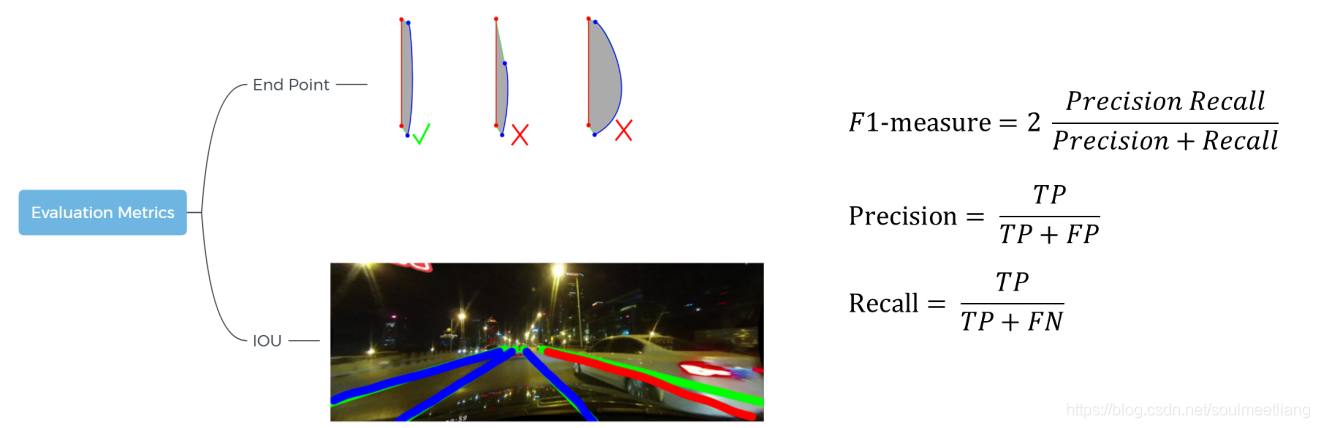 如上图所示,在评判ture or false时,主要有两种方式:
如上图所示,在评判ture or false时,主要有两种方式:
- end point,通过判断线的端点间的距离及其包围面积是否超过阈值
- IOU,直接计算IOU的重叠面积
工作pipeline
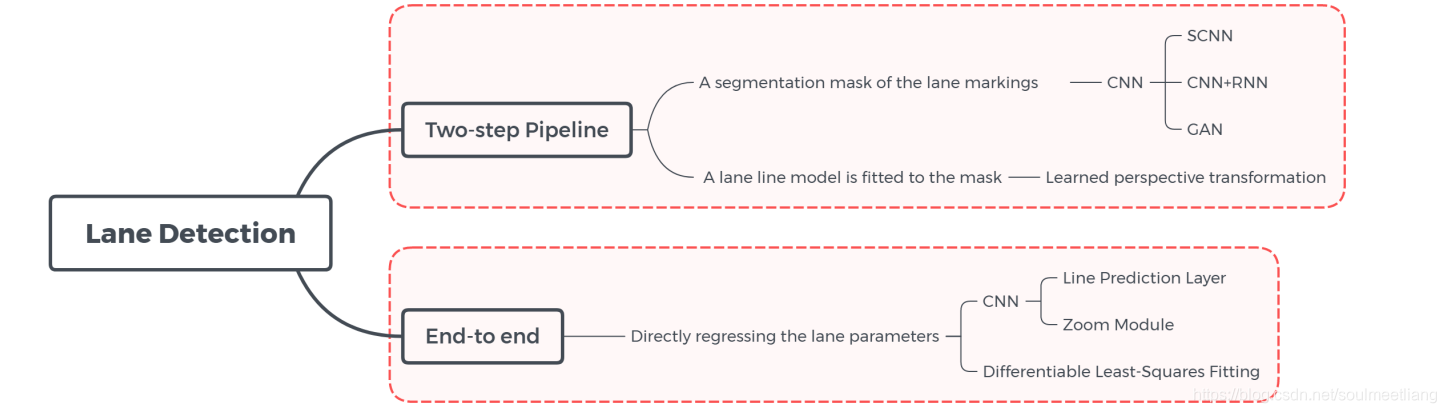
如上图所示,目前的主流方法pipeline分为多阶段与单阶段。
- 多阶段可以分为两个部分,二值语义分割产生掩码图和对掩码图进行线的拟合。其中,二值语义分割主要采用CNN方法,并通过SCNN(Spatial As Deep: Spatial CNN for Traffic Scene Understanding)、CNN+RNN(Robust Lane Detection from Continuous Driving Scenes Using Deep Neural Networks
)、GAN(EL-GAN:Embedding Loss Driven Generateive Adversarial Networks for Lane Detection)等方法来提高语义分割精度。
而对掩码图的线的拟合,有采用学习到的转换矩阵先将分割结果转换为鸟瞰图视角,然后,采用均匀取点+最小二乘法拟合,拟合方程可选三次方程。 - 对于单阶段方法,即是直接回归出线的参数,即在CNN上修改分支,使用特殊层将参数输出。
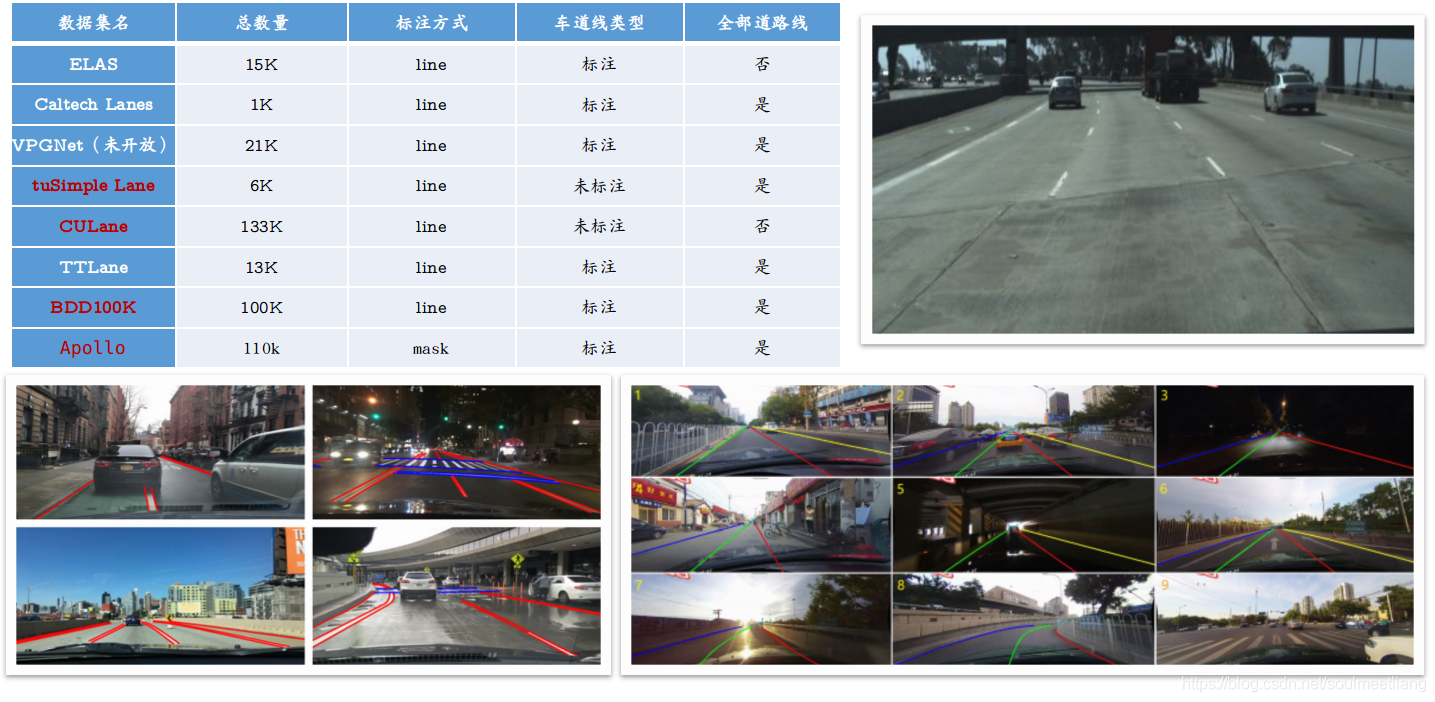
数据集
传统方法
近三年的部分工作(基于深度学习)
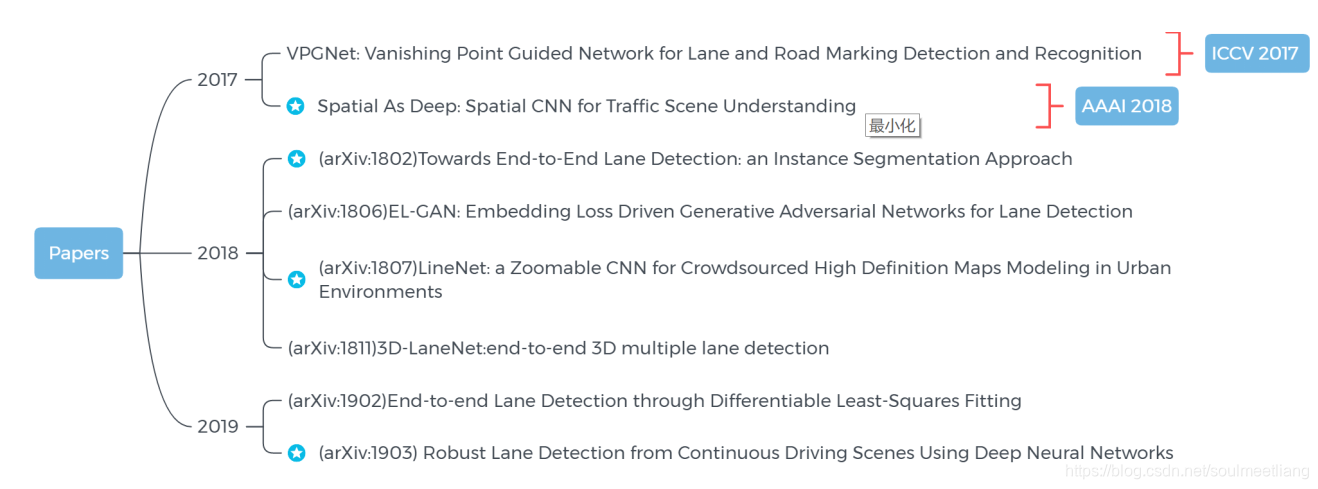
引用github项目 awesome-lane-detection
Paper
2019
《Robust Lane Detection from Continuous Driving Scenes Using Deep Neural Networks》
《End-to-end Lane Detection through Differentiable Least-Squares Fitting》 github
2018
《End to End Video Segmentation for Driving : Lane Detection For Autonomous Car》
《3D-LaneNet: end-to-end 3D multiple lane detection》
《Efficient Road Lane Marking Detection with Deep Learning》 DSP 2018
《Multiple Lane Detection Algorithm Based on Optimised Dense Disparity Map Estimation》 IST 2018
《LineNet: a Zoomable CNN for Crowdsourced High Definition Maps Modeling in Urban Environments》
《Real-time stereo vision-based lane detection system》
《LaneNet: Real-Time Lane Detection Networks for Autonomous Driving》
《EL-GAN: Embedding Loss Driven Generative Adversarial Networks for Lane Detection》
《Real-time Lane Marker Detection Using Template Matching with RGB-D Camera》
《Towards End-to-End Lane Detection: an Instance Segmentation Approach》 论文解读 github
《Lane Detection and Classification for Forward Collision Warning System Based on Stereo Vision》
《(SCNN)Spatial As Deep: Spatial CNN for Traffic Scene Understanding》 AAAI 2018 CSDN Translator
《Lane Detection Based on Inverse Perspective Transformation and Kalman Filter》
2017
《A review of recent advances in lane detection and departure warning system》
《Deep Learning Lane Marker Segmentation From Automatically Generated Labels》 Youtube
VPGNet: Vanishing Point Guided Network for Lane and Road Marking Detection and Recognition ICCV 2017 github
Code
https://github.com/wvangansbeke/LaneDetection_End2End
https://github.com/georgesung/advanced_lane_detection
https://github.com/MaybeShewill-CV/lanenet-lane-detection
https://github.com/XingangPan/SCNN
https://github.com/davidawad/Lane-Detection
https://github.com/yang1688899/CarND-Advanced-Lane-Lines
https://github.com/SeokjuLee/VPGNet
https://github.com/mvirgo/MLND-Capstone:Lane Detection with Deep Learning
https://github.com/galenballew/SDC-Lane-and-Vehicle-Detection-Tracking
https://github.com/shawshany/Advance_LaneFinding
Blog
Lane Detection with Deep Learning (Part 1)
Simple Lane Detection with OpenCV
Building a lane detection system using Python 3 and OpenCV
Datasets
A Dataset for Lane Instance Segmentation in Urban Environments
论文介绍
后面会各开一篇详细介绍
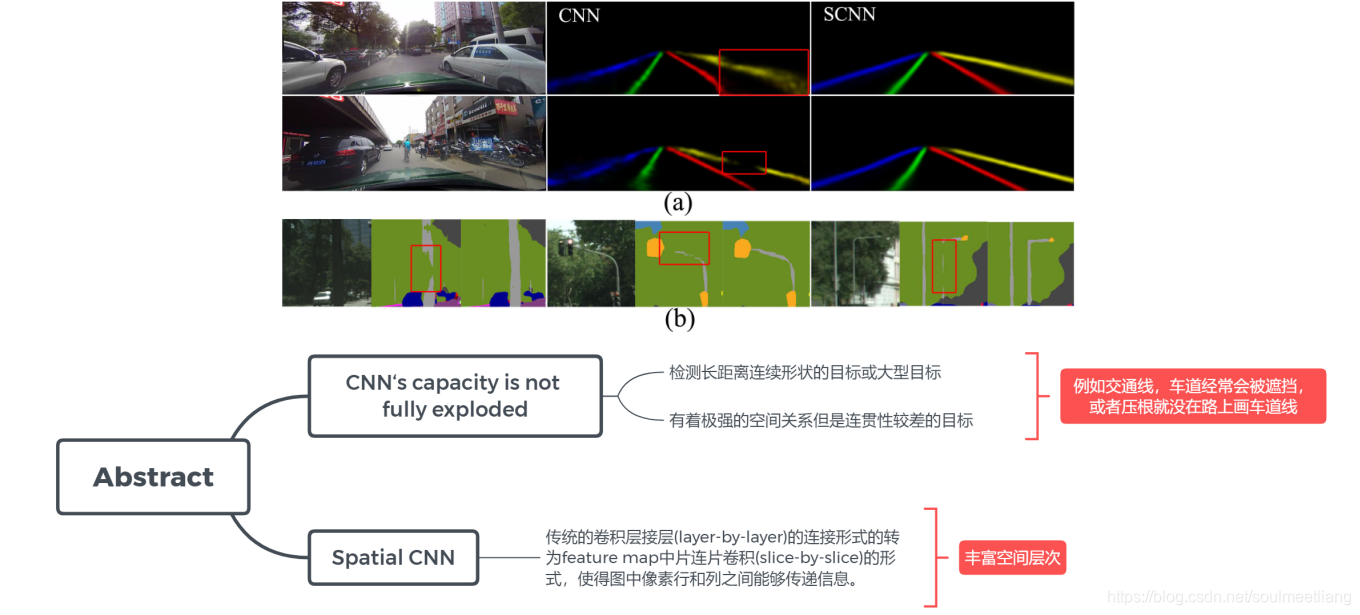
Spatial As Deep: Spatial CNN for Traffic Scene Understanding
Abstract
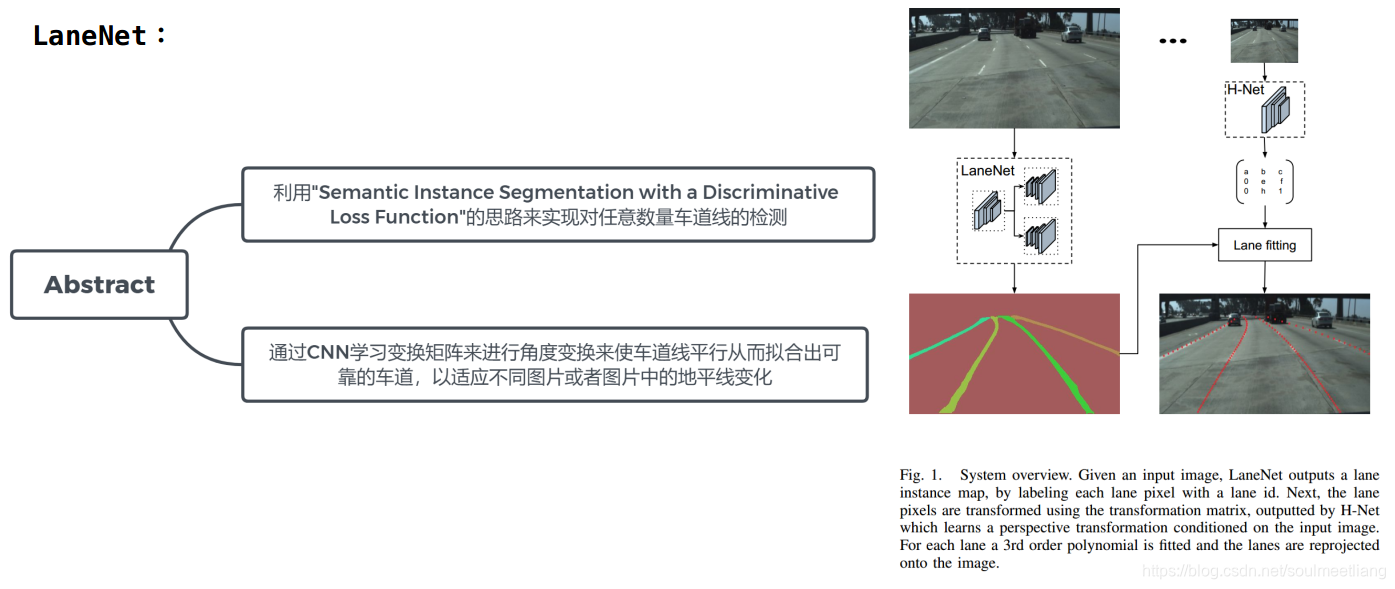
Towards End-to-End Lane Detection: an Instance Segmentation Approach
Abstract
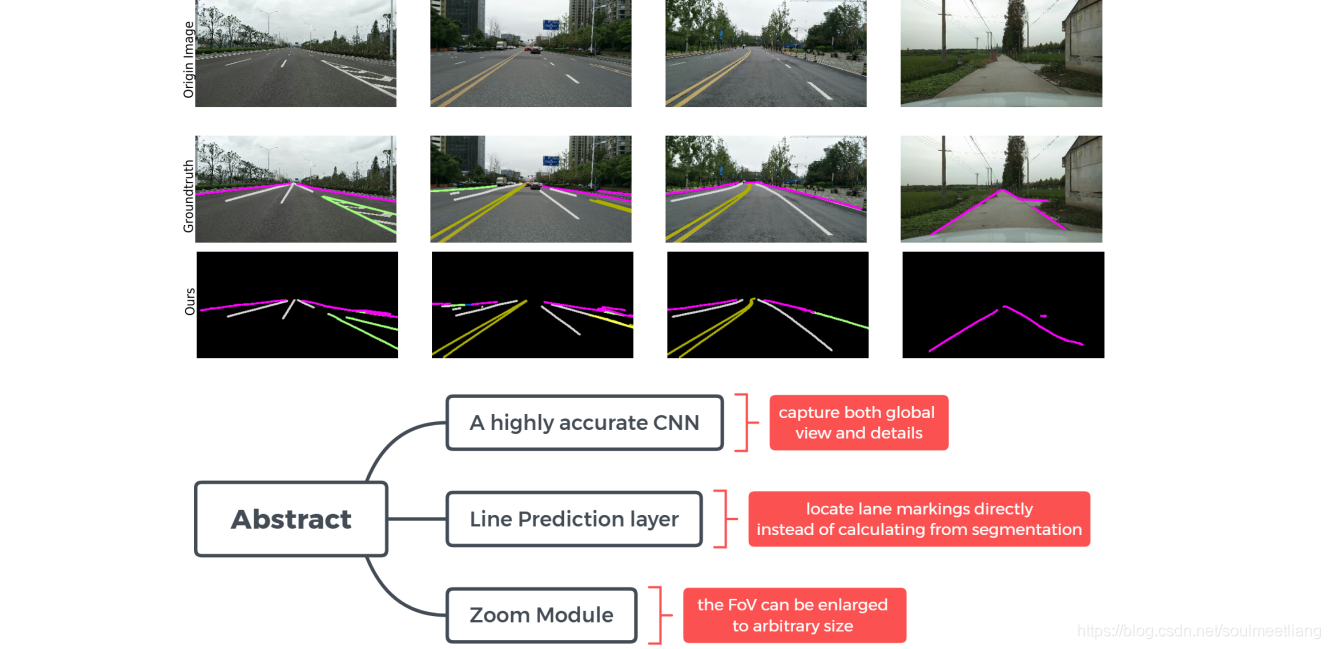
LineNet: a Zoomable CNN for Crowdsourced High Definition Maps Modeling in Urban Environments
Abstract
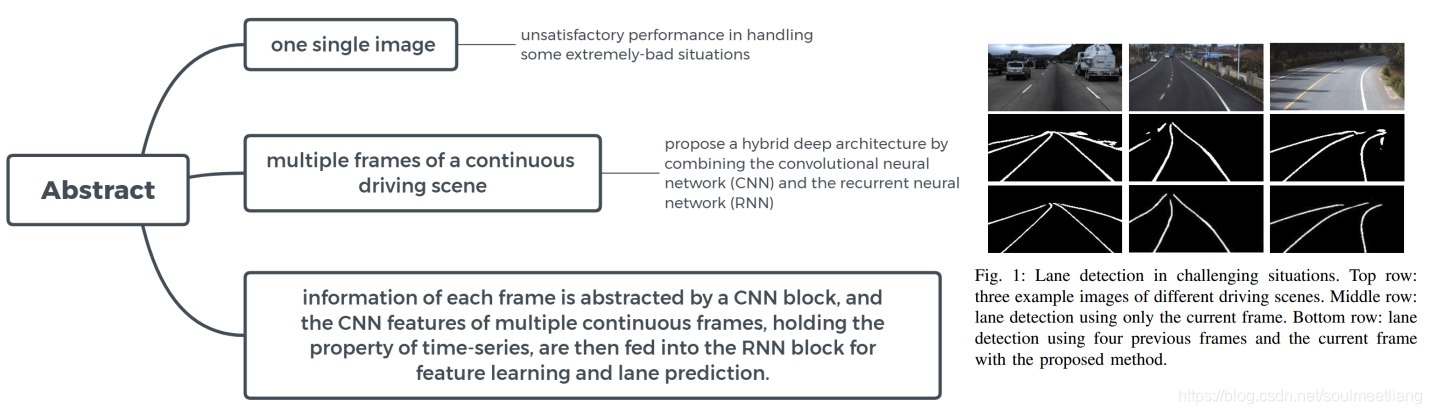
Robust Lane Detection from Continuous Driving Scenes Using Deep Neural Networks
Abstract
</div>
