一、模型
时刻不忘我们的模型在引入
β参数之后变成这个样子,信号输出[x,y]是圆上的点P的位置(这点很重要):
dtdx=dtdy=r2=ω=ωst=α(μ−r2)x−ωyα(μ−r2)y+ωxx2+y2e−ay+1ωst+eay+1ωswβ1−βωsw
各种参数的特性这里就不在重复解释了,如果忘了的小伙伴可以查看我之前的文章,文章放在四足机器人的专栏里面。
二、
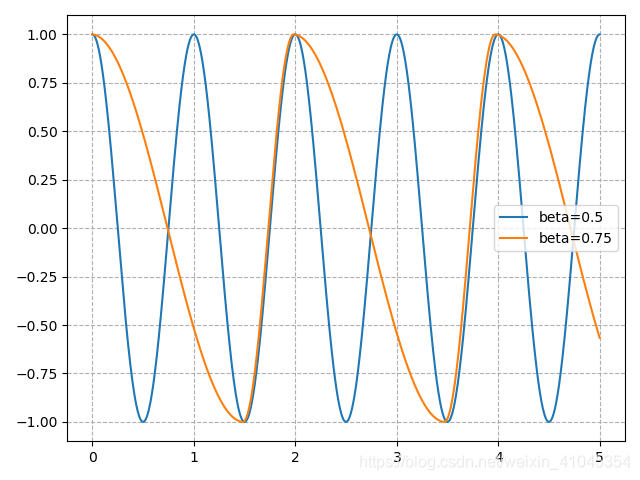
β连续变换
我们取不同的
β值能够得到不同形状的信号输出,如下图。
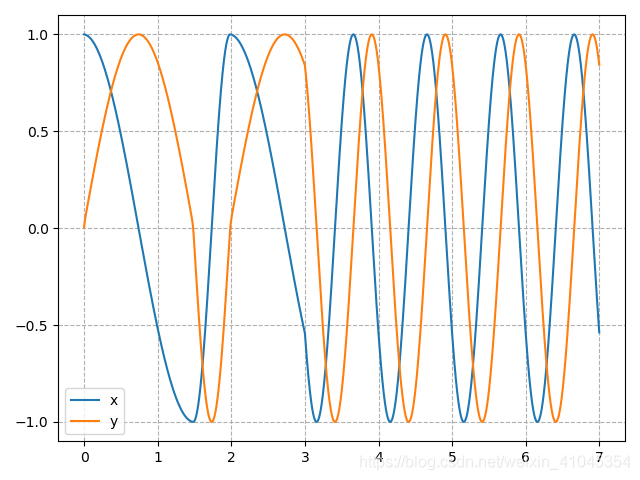
但是这是两条曲线,即在不同振荡器上实现。我们能否实现同个hopf振荡器上,信号输出的连续变化呢?答案是肯定的,而且,不需要修改我们的模型。如下图,振荡器在4s后,
β从0.75连续变化成0.5。
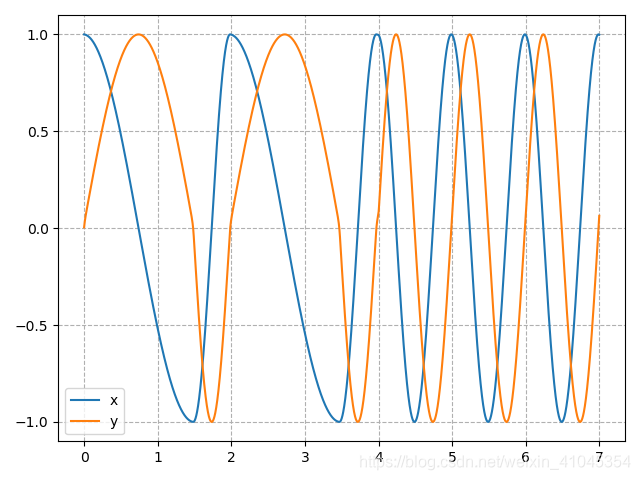
如果
β不是连续变化的呢?(3s后突变),看下图可知,就会产生的信号就会不平滑。