本篇文章主要介绍毫米波雷达的基础知识中的中频信号的相位
傅里叶变换的快速回顾
傅里叶变换是将一个信号从时域中转换到频域中,在时域中的一个正弦信号将在频域中产生一个峰值,在大多数情况下,在频域中的一个信号是一个复数(每个值是一个振幅和相位的向量),表示为 A e j θ Ae^{j\theta} Aejθ

在频域中峰值的相位等于正弦函数的初始相位

中频信号的相位
上一篇文章中提到,雷达前方的一个物体会产生一个中频信号,频率为 S 2 d c \frac{S2d}{c} cS2d,上一篇文章主要是分析中频信号在频率时间图(f-t)中的显示。
本篇文章只要是分析中频信号在幅度时间图(A-t)中的显示

上图中第一个信号是TX chirp,第二个信号是RX chirp,第三个信号是IF signal,混频器的作用就是将TX信号和RX信号的频率和相位分别相减,得到中频信号的频率和相位
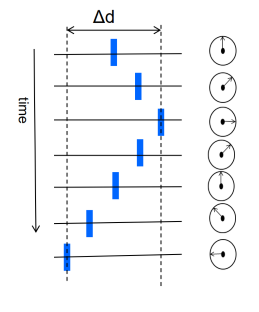
当RX chirp的时间延迟 Δ τ \Delta\tau Δτ的时候,会出现下图的情况

上图显示A和D之间的相位差为 Δ Φ = 2 π f c Δ τ = 4 π Δ d λ \Delta\Phi=2\pi f_c \Delta\tau=\frac{4\pi\Delta d}{\lambda} ΔΦ=2πfcΔτ=λ4πΔd,这个相位也是C和F之间的相位差
推导公式: Δ Φ = 2 π f c Δ τ = 4 π Δ d λ \Delta\Phi=2\pi f_c \Delta\tau=\frac{4\pi\Delta d}{\lambda} ΔΦ=2πfcΔτ=λ4πΔd
已知: Δ τ = 2 Δ d c , λ = c f \Delta\tau = \frac{2\Delta d}{c},\lambda = \frac{c}{f} Δτ=c2Δd,λ=fc
进行替换得到: Δ Φ = 2 π f c Δ τ = 4 π Δ d λ \Delta\Phi=2\pi f_c \Delta\tau=\frac{4\pi\Delta d}{\lambda} ΔΦ=2πfcΔτ=λ4πΔd
中频信号为 A s i n ( 2 π f t + ϕ o ) , f = S 2 d c , Δ = 4 π Δ d λ Asin(2\pi ft + \phi_o),f=\frac{S2d}{c},\Delta = \frac{4\pi \Delta d}{\lambda} Asin(2πft+ϕo),f=cS2d,Δ=λ4πΔd,这个式子说明,在雷达前面的单个物体,中频信号的频率与物体的距离成正比,物体的起始相位随距离的微小变换 Δ d \Delta d Δd以线性方式进行改变
中频信号对物体微小位移的灵敏度
中频信号为 A s i n ( 2 π f t + ϕ o ) , f = S 2 d c , Δ = 4 π Δ d λ Asin(2\pi ft + \phi_o),f=\frac{S2d}{c},\Delta = \frac{4\pi \Delta d}{\lambda} Asin(2πft+ϕo),f=cS2d,Δ=λ4πΔd
假设chirp如下图所示,雷达前面有一个物体,并且移动1mm会发生什么情况?

对于77GHz的雷达,1mm相当于 λ 4 \frac{\lambda}{4} 4λ
λ = c f = 3 ∗ 1 0 8 77 ∗ 1 0 9 = 3.89 m m \lambda = \frac{c}{f} = \frac{3*10^8}{77*10^9} = 3.89mm λ=fc=77∗1093∗108=3.89mm
因此,1mm相当于 λ 4 \frac{\lambda}{4} 4λ
雷达前方的物体移动1mm,相位的变化为 Δ ϕ = 4 π Δ d λ = π = 180 ° \Delta \phi= \frac{4\pi \Delta d}{\lambda} = \pi = 180\degree Δϕ=λ4πΔd=π=180°,频率变化为 Δ f = S 2 Δ d c = 50 ∗ 1 0 12 ∗ 2 ∗ 1 ∗ 1 0 − 3 3 ∗ 1 0 8 = 333 H z \Delta f = \frac{S2\Delta d}{c} = \frac{50 * 10^{12} * 2 * 1 * 10^{-3}}{3 * 10^8} = 333Hz Δf=cS2Δd=3∗10850∗1012∗2∗1∗10−3=333Hz。333Hz看起来是一个很大的数字,但在观测窗口内仅仅对应的是 Δ f T c = 333 ∗ 40 ∗ 1 0 − 6 = 0.013 c y c l e s \Delta f T_c = 333*40*10^{-6} = 0.013cycles ΔfTc=333∗40∗10−6=0.013cycles,这个改变在频率谱中是不可分辨的
如何2个chirps来对一个物体的速度进行测量
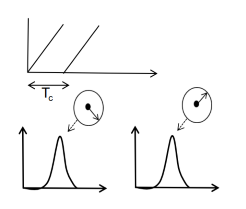
- 发送两个时间间隔为 T c T_c Tc的chirp
- 对接收回来的信号做range-FFTs会在相位的位置产生峰值,但是有不同的相位
- 相位差( ω \omega ω)对应于物体移动的距离 v T c vT_c vTc,v是物体的速度, T c T_c Tc是时间
因此有下列公式:
ω = 4 π v T c λ \omega = \frac{4 \pi v T_c}{\lambda} ω=λ4πvTc
推出 v = λ ω 4 π T c v = \frac{\lambda \omega}{4 \pi T_c} v=4πTcλω
因此两个连续的chirp可以用来估计一个目标的速度
测量一个振动的物体

相位随时间的变换可以用来估计振动物体的振幅和周期性
参考文献:
- 《mmwaveSensing-FMCW-offlineviewing》