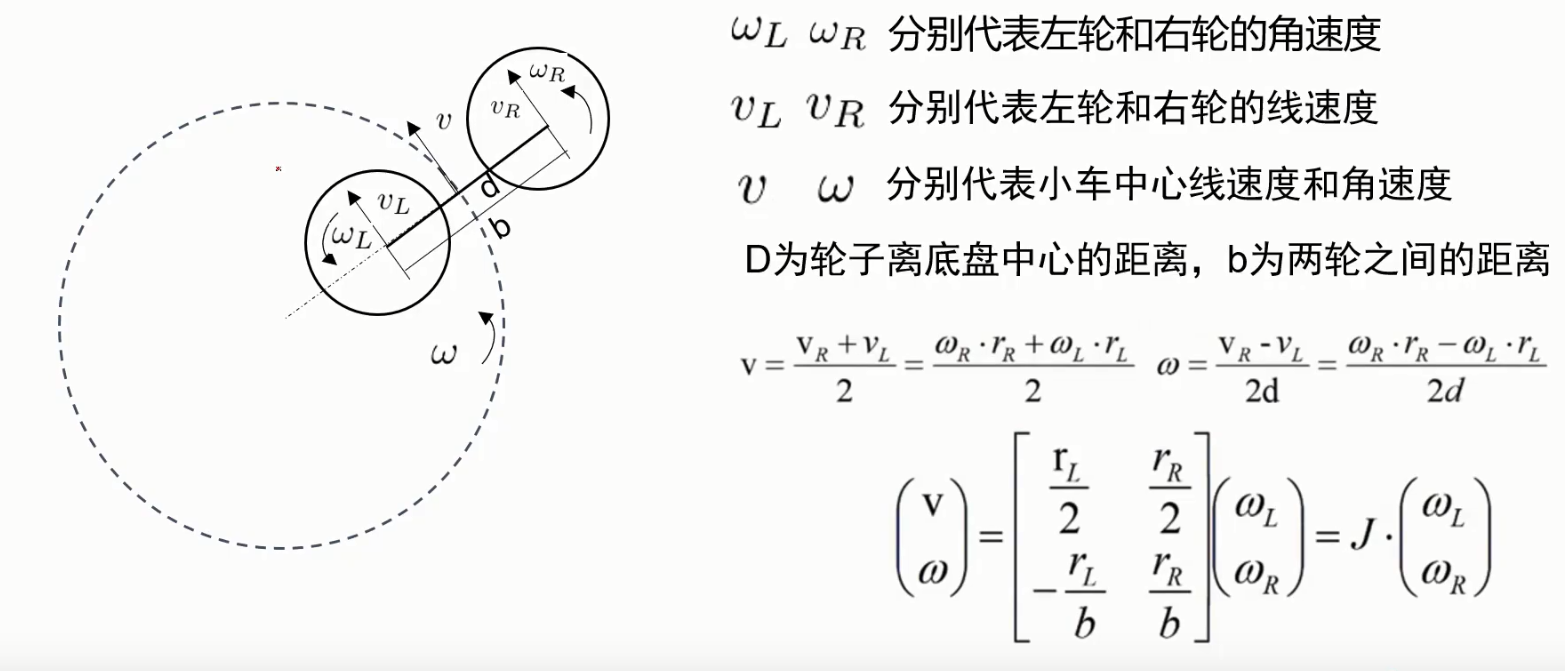
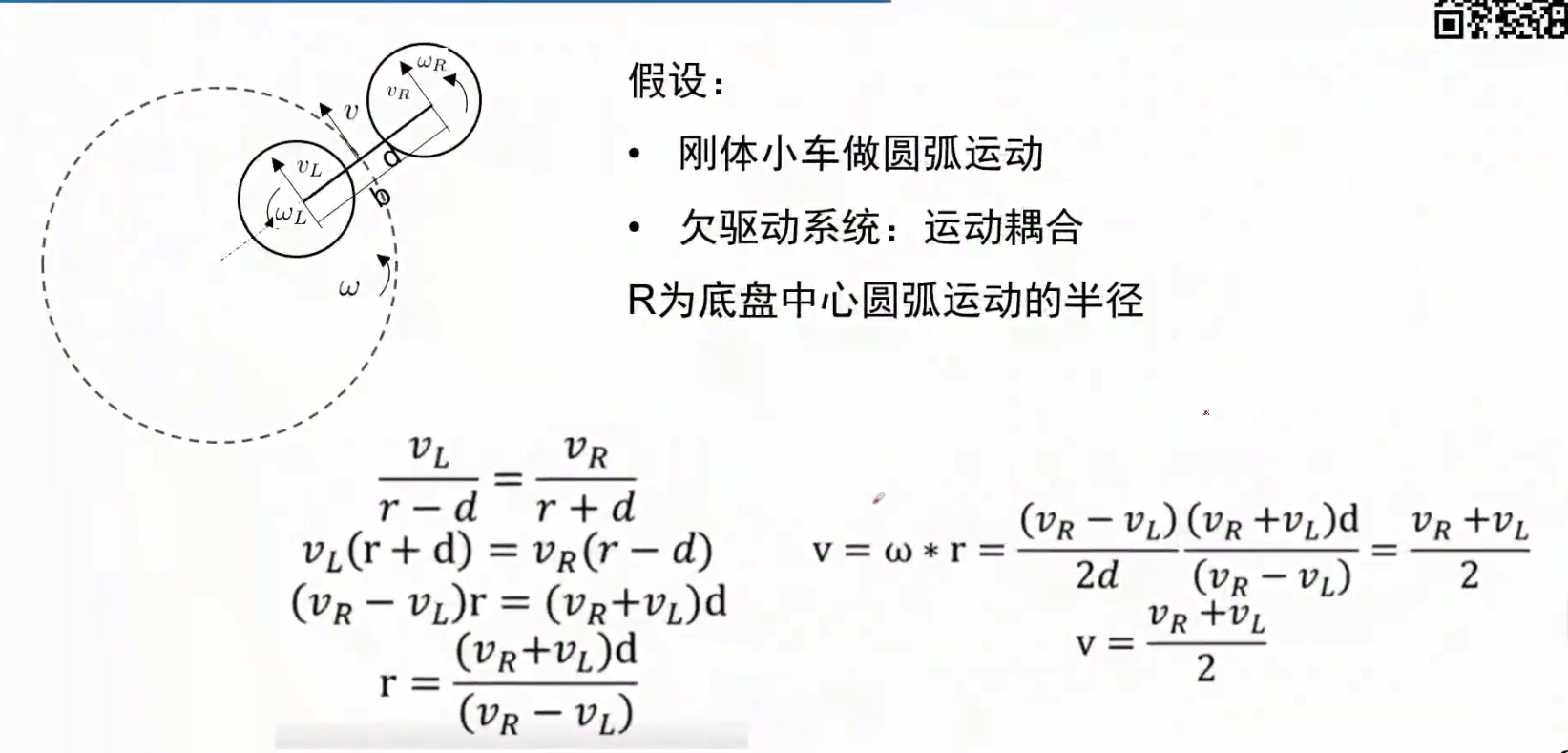
正运动学解
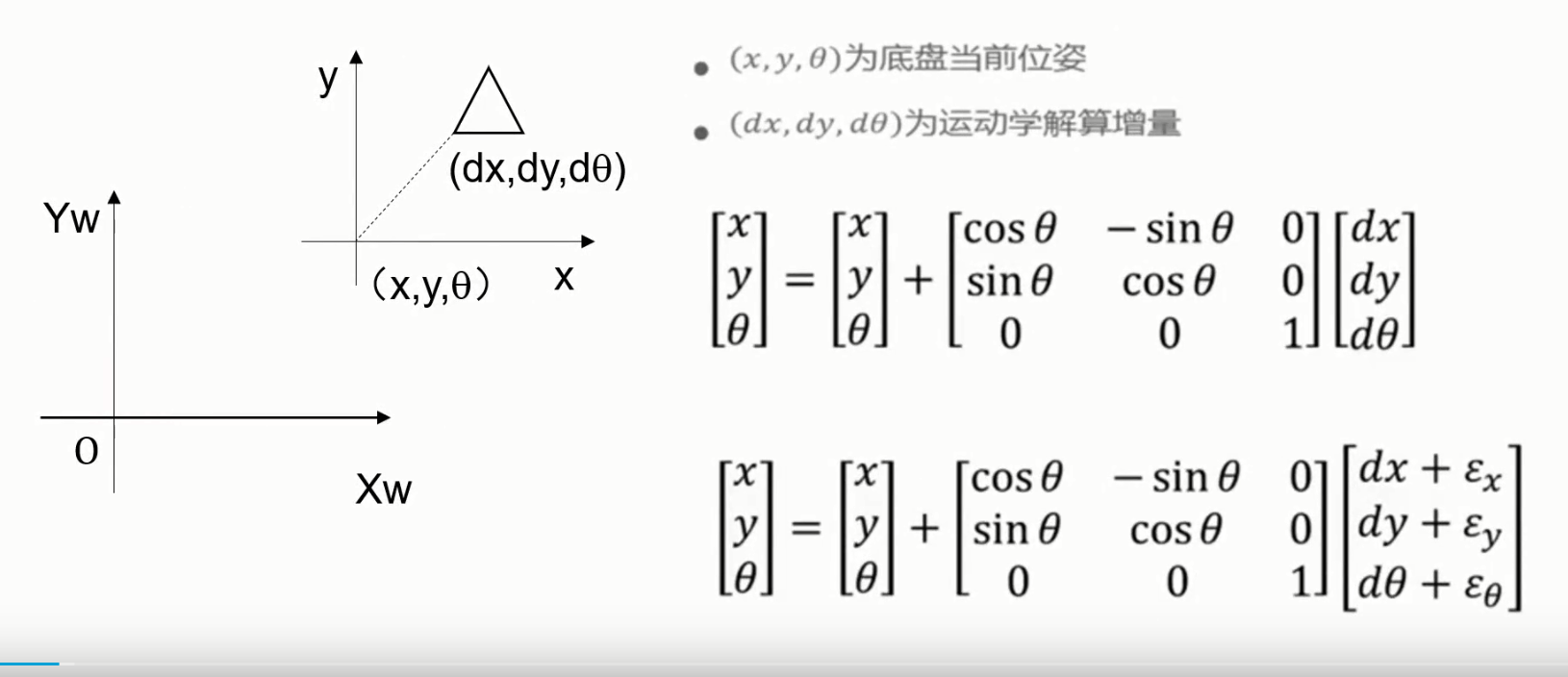
逆运动解编码
订阅cmd_val下的geometry_msgs::Twist消息 ,并且实际转化为左右轮的速度,以下是转换的源码。
geometry_msgs::Twist twist = twist_aux;
double vel_x = twist_aux.linear.x;
double vel_th = twist_aux.angular.z;
double right_vel = 0.0;
double left_vel = 0.0;
left_vel = vel_x - vel_th * width_robot / 2.0;
right_vel = vel_x + vel_th * width_robot / 2.0;