对于网图来说,最短路径,是指俩顶点之间经过的边上权值之和最少的路径,并且我们称路径上的第一个顶点是源点,最后一个顶点是终点。而非网图完全可以理解为所有的边的权值都为1的网。
从某个源点到其余各顶点的最短路径问题——迪杰斯特拉(Dijkstra)算法
这是一个按路径长度递增的次序产生最短路径的算法。它并不是一下子就求出源点到终点的最短路径,而是一步步求出它们之间顶点的最短路径,过程中都是基于已经求出的最短路径的基础上,求得更远顶点的最短路径,最终得到你要的结果。
代码如下:
#include "stdio.h"
#include "stdlib.h"
#include "io.h"
#include "math.h"
#include "time.h"
#define OK 1
#define ERROR 0
#define TRUE 1
#define FALSE 0
#define MAXEDGE 20
#define MAXVEX 20
#define INFINITY 65535
typedef int Status; /* Status是函数的类型,其值是函数结果状态代码,如OK等 */
typedef struct
{
int vexs[MAXVEX];
int arc[MAXVEX][MAXVEX];
int numVertexes, numEdges;
}MGraph;
typedef int Patharc[MAXVEX]; /* 用于存储最短路径下标的数组 */
typedef int ShortPathTable[MAXVEX];/* 用于存储到各点最短路径的权值和 */
/* 构件图 */
void CreateMGraph(MGraph *G)
{
int i, j;
/* printf("请输入边数和顶点数:"); */
G->numEdges=16;
G->numVertexes=9;
for (i = 0; i < G->numVertexes; i++)/* 初始化图 */
{
G->vexs[i]=i;
}
for (i = 0; i < G->numVertexes; i++)/* 初始化图 */
{
for ( j = 0; j < G->numVertexes; j++)
{
if (i==j)
G->arc[i][j]=0;
else
G->arc[i][j] = G->arc[j][i] = INFINITY;
}
}
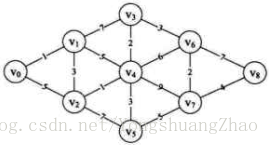
G->arc[0][1]=1;
G->arc[0][2]=5;
G->arc[1][2]=3;
G->arc[1][3]=7;
G->arc[1][4]=5;
G->arc[2][4]=1;
G->arc[2][5]=7;
G->arc[3][4]=2;
G->arc[3][6]=3;
G->arc[4][5]=3;
G->arc[4][6]=6;
G->arc[4][7]=9;
G->arc[5][7]=5;
G->arc[6][7]=2;
G->arc[6][8]=7;
G->arc[7][8]=4;
for(i = 0; i < G->numVertexes; i++)
{
for(j = i; j < G->numVertexes; j++)
{
G->arc[j][i] =G->arc[i][j];
}
}
}
/* Dijkstra算法,求有向网G的v0顶点到其余顶点v的最短路径P[v]及带权长度D[v] */
/* P[v]的值为前驱顶点下标,D[v]表示v0到v的最短路径长度和 */
void ShortestPath_Dijkstra(MGraph G, int v0, Patharc *P, ShortPathTable *D)
{
int v,w,k,min;
int final[MAXVEX];/* final[w]=1表示求得顶点v0至vw的最短路径 */
for(v=0; v<G.numVertexes; v++) /* 初始化数据 */
{
final[v] = 0; /* 全部顶点初始化为未知最短路径状态 */
(*D)[v] = G.arc[v0][v];/* 将与v0点有连线的顶点加上权值 */
(*P)[v] = -1; /* 初始化路径数组P为-1 */
}
(*D)[v0] = 0; /* v0至v0路径为0 */
final[v0] = 1; /* v0至v0不需要求路径 */
/* 开始主循环,每次求得v0到某个v顶点的最短路径 */
for(v=1; v<G.numVertexes; v++)
{
min=INFINITY; /* 当前所知离v0顶点的最近距离 */
for(w=0; w<G.numVertexes; w++) /* 寻找离v0最近的顶点 */
{
if(!final[w] && (*D)[w]<min)
{
k=w;
min = (*D)[w]; /* w顶点离v0顶点更近 */
}
}
final[k] = 1; /* 将目前找到的最近的顶点置为1 */
for(w=0; w<G.numVertexes; w++) /* 修正当前最短路径及距离 */
{
/* 如果经过v顶点的路径比现在这条路径的长度短的话 */
if(!final[w] && (min+G.arc[k][w]<(*D)[w]))
{ /* 说明找到了更短的路径,修改D[w]和P[w] */
(*D)[w] = min + G.arc[k][w]; /* 修改当前路径长度 */
(*P)[w]=k;
}
}
}
}
int main(void)
{
int i,j,v0;
MGraph G;
Patharc P;
ShortPathTable D; /* 求某点到其余各点的最短路径 */
v0=0;
CreateMGraph(&G);
ShortestPath_Dijkstra(G, v0, &P, &D);
printf("最短路径倒序如下:\n");
for(i=1;i<G.numVertexes;++i)
{
printf("v%d - v%d : ",v0,i);
j=i;
while(P[j]!=-1)
{
printf("%d ",P[j]);
j=P[j];
}
printf("\n");
}
printf("\n源点到各顶点的最短路径长度为:\n");
for(i=1;i<G.numVertexes;++i)
printf("v%d - v%d : %d \n",G.vexs[0],G.vexs[i],D[i]);
return 0;
}
迪杰斯特拉算法的时间复杂度为O(n^2)。
若想求任一顶点到其余所有顶点的最短路径,此时简单的方法是对每个顶点当作源点运行一次迪杰斯特拉算法。此时整个算法时间复杂度就是O(n^3)。
所有顶点至所有顶点的最短路径——弗洛伊德(Floyd)算法

#include "stdio.h"
#include "stdlib.h"
#include "io.h"
#include "math.h"
#include "time.h"
#define OK 1
#define ERROR 0
#define TRUE 1
#define FALSE 0
#define MAXEDGE 20
#define MAXVEX 20
#define INFINITY 65535
typedef int Status; /* Status是函数的类型,其值是函数结果状态代码,如OK等 */
typedef struct
{
int vexs[MAXVEX];
int arc[MAXVEX][MAXVEX];
int numVertexes, numEdges;
}MGraph;
typedef int Patharc[MAXVEX][MAXVEX];
typedef int ShortPathTable[MAXVEX][MAXVEX];
/* 构件图 */
void CreateMGraph(MGraph *G)
{
int i, j;
/* printf("请输入边数和顶点数:"); */
G->numEdges=16;
G->numVertexes=9;
for (i = 0; i < G->numVertexes; i++)/* 初始化图 */
{
G->vexs[i]=i;
}
for (i = 0; i < G->numVertexes; i++)/* 初始化图 */
{
for ( j = 0; j < G->numVertexes; j++)
{
if (i==j)
G->arc[i][j]=0;
else
G->arc[i][j] = G->arc[j][i] = INFINITY;
}
}
G->arc[0][1]=1;
G->arc[0][2]=5;
G->arc[1][2]=3;
G->arc[1][3]=7;
G->arc[1][4]=5;
G->arc[2][4]=1;
G->arc[2][5]=7;
G->arc[3][4]=2;
G->arc[3][6]=3;
G->arc[4][5]=3;
G->arc[4][6]=6;
G->arc[4][7]=9;
G->arc[5][7]=5;
G->arc[6][7]=2;
G->arc[6][8]=7;
G->arc[7][8]=4;
for(i = 0; i < G->numVertexes; i++)
{
for(j = i; j < G->numVertexes; j++)
{
G->arc[j][i] =G->arc[i][j];
}
}
}
/* Floyd算法,求网图G中各顶点v到其余顶点w的最短路径P[v][w]及带权长度D[v][w]。 */
void ShortestPath_Floyd(MGraph G, Patharc *P, ShortPathTable *D)
{
int v,w,k;
for(v=0; v<G.numVertexes; ++v) /* 初始化D与P */
{
for(w=0; w<G.numVertexes; ++w)
{
(*D)[v][w]=G.arc[v][w]; /* D[v][w]值即为对应点间的权值 */
(*P)[v][w]=w; /* 初始化P */
}
}
for(k=0; k<G.numVertexes; ++k)
{
for(v=0; v<G.numVertexes; ++v)
{
for(w=0; w<G.numVertexes; ++w)
{
if ((*D)[v][w]>(*D)[v][k]+(*D)[k][w])
{/* 如果经过下标为k顶点路径比原两点间路径更短 */
(*D)[v][w]=(*D)[v][k]+(*D)[k][w];/* 将当前两点间权值设为更小的一个 */
(*P)[v][w]=(*P)[v][k];/* 路径设置为经过下标为k的顶点 */
}
}
}
}
}
int main(void)
{
int v,w,k;
MGraph G;
Patharc P;
ShortPathTable D; /* 求某点到其余各点的最短路径 */
CreateMGraph(&G);
ShortestPath_Floyd(G,&P,&D);
printf("各顶点间最短路径如下:\n");
for(v=0; v<G.numVertexes; ++v)
{
for(w=v+1; w<G.numVertexes; w++)
{
printf("v%d-v%d weight: %d ",v,w,D[v][w]);
k=P[v][w]; /* 获得第一个路径顶点下标 */
printf(" path: %d",v); /* 打印源点 */
while(k!=w) /* 如果路径顶点下标不是终点 */
{
printf(" -> %d",k); /* 打印路径顶点 */
k=P[k][w]; /* 获得下一个路径顶点下标 */
}
printf(" -> %d\n",w); /* 打印终点 */
}
printf("\n");
}
printf("最短路径D\n");
for(v=0; v<G.numVertexes; ++v)
{
for(w=0; w<G.numVertexes; ++w)
{
printf("%d\t",D[v][w]);
}
printf("\n");
}
printf("最短路径P\n");
for(v=0; v<G.numVertexes; ++v)
{
for(w=0; w<G.numVertexes; ++w)
{
printf("%d ",P[v][w]);
}
printf("\n");
}
return 0;
}
弗洛伊德时间复杂度为O(n^3)。