张量
数组与张量
PyTorch 作为当前首屈一指的深度学习库,其将 NumPy 数组的语法尽数吸收,作为自己处理张量的基本语法,且运算速度从使用 CPU 的数组进步到使用 GPU 的张量。
NumPy 和 PyTorch 的基础语法几乎一致,具体表现为:
- np 对应 torch;
- 数组 array 对应张量 tensor;
- NumPy 的 n 维数组对应着 PyTorch 的 n 阶张量。
数组与张量之间可以互相转换
- 数组 arr 转为张量 ts:ts = torch.tensor(arr);
- 张量 ts 转为数组 arr:arr = np.array(ts)。
从数组到张量
PyTorch 只是少量修改了 NumPy 的函数或方法,现对其中不同的地方进行罗列。
| NumPy 的函数 | PyTorch 的函数 | 用法区别 | |
|---|---|---|---|
| 数据类型 | .astype( ) | .type( ) | 无 |
| 随机数组 | np.random.random( ) | torch.rand( ) | 无 |
| 随机数组 | np.random.randint( ) | torch.randint( ) | 不接纳一维张量 |
| 随机数组 | np.random.normal( ) | torch.normal( ) | 不接纳一维张量 |
| 随机数组 | np.random.randn( ) | torch.randn( ) | 无 |
| 数组切片 | .copy( ) | .clone( ) | 无 |
| 数组拼接 | np.concatenate( ) | torch.cat( ) | 无 |
| 数组分裂 | np.split( ) | torch.split( ) | 参数含义优化 |
| 矩阵乘积 | np.dot( ) | torch.matmul( ) | 无 |
| 矩阵乘积 | np.dot(v,v) | torch.dot( ) | 无 |
| 矩阵乘积 | np.dot(m,v) | torch.mv( ) | 无 |
| 矩阵乘积 | np.dot(m,m) | torch.mm( ) | 无 |
| 数学函数 | np.exp( ) | torch.exp( ) | 必须传入张量 |
| 数学函数 | np.log( ) | torch.log( ) | 必须传入张量 |
| 聚合函数 | np.mean( ) | torch.mean( ) | 必须传入浮点型张量 |
| 聚合函数 | np.std( ) | torch.std( ) | 必须传入浮点型张量 |
用GPU存储张量
默认的张量使用 CPU 存储,可将其搬至 GPU 上,如示例所示。
import torch
# 默认的张量存储在 CPU 上
ts1 = torch.randn(3,4)
ts1 #OUT:tensor([[ 2.2716, 1.2107, -0.0582, 0.5885 ],
# [-0.5868, -0.6480, -0.2591, 0.1605],
# [-1.3968, 0.7999, 0.5180, 1.2214 ]])
# 移动到 GPU 上
ts2 = ts1.to('cuda:0') # 第一块 GPU 是 cuda:0
ts2 #OUT: tensor([[ 2.2716, 1.2107, -0.0582, 0.5885 ],
# [-0.5868, -0.6480, -0.2591, 0.1605],
# [-1.3968, 0.7999, 0.5180, 1.2214 ]], device='cuda:0')
以上操作可以把数据集搬到 GPU 上,但是神经网络模型也要搬到 GPU 上才可正常运行,使用下面的代码即可。
# 搭建神经网络的类,此处略,详见第三章
class DNN(torch.nn.Module):
#略
# 根据神经网络的类创建一个网络
model = DNN().to('cuda:0') # 把该网络搬到 GPU 上
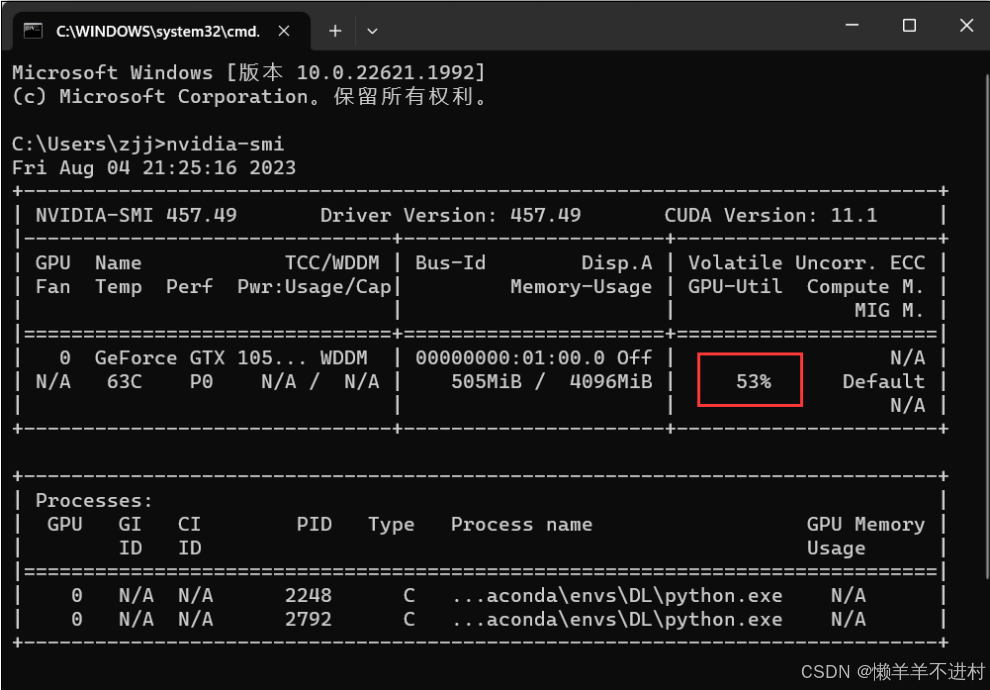
想要查看显卡是否在运作时,在 cmd 中输入:nvidia-smi,如下图所示。
DNN原理
神经网络通过学习大量样本的输入与输出特征之间的关系,以拟合出输入与输出之间的方程,学习完成后,只给它输入特征,它便会可以给出输出特征。神经网络可以分为这么几步:划分数据集、训练网络、测试网络、使用网络。
划分数据集
数据集里每个样本必须包含输入与输出,将数据集按一定的比例划分为训练集与测试集,分别用于训练网络与测试网络,如下表所示。
| 样本 | 输入特征 | 输出特征 | |
|---|---|---|---|
| 训练集 | 1 | In1 ln2 ln3 | Out1 Out2 Out3 |
| 训练集 | 2 | * * * | * * * |
| 训练集 | 3 | * * * | * * * |
| 训练集 | 4 | * * * | * * * |
| 训练集 | 5 | * * * | * * * |
| 训练集 | … | * * * | * * * |
| 训练集 | 800 | * * * | * * * |
| 测试集 | 801 | * * * | * * * |
| 测试集 | 802 | * * * | * * * |
| 测试集 | … | * * * | * * * |
| 测试集 | 1000 | * * * | * * * |
考虑到数据集的输入特征与输出特征都是 3 列,因此神经网络的输入层与输出层也必须都是 3 个神经元,隐藏层可以自行设计,如下图所示。
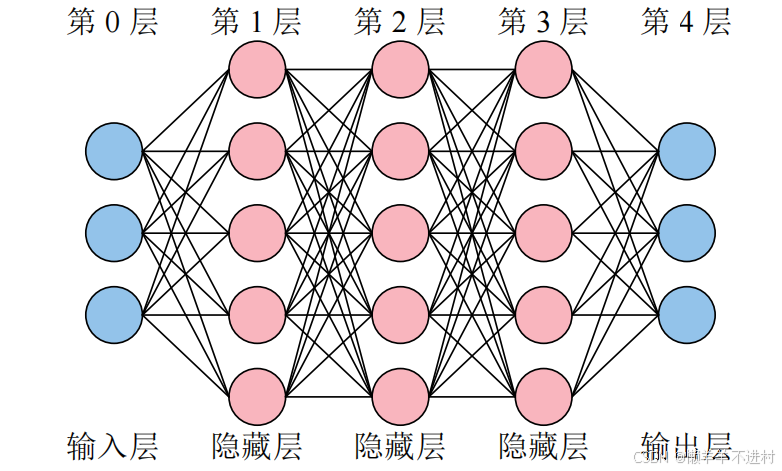
考虑到 Python 列表、NumPy 数组以及 PyTorch 张量都是从索引[0]开始,再加之输入层没有内部参数(权重 ω 与偏置 b),所以习惯将输入层称之为第 0 层。
训练网络
- 神经网络的训练过程,就是经过很多次前向传播与反向传播的轮回,最终不断调整其内部参数(权重 ω 与偏置 b),以拟合任意复杂函数的过程。内部参数一开始是随机的(如 Xavier 初始值、He 初始值),最终会不断优化到最佳。
- 还有一些训练网络前就要设好的外部参数:网络的层数、每个隐藏层的节点数、每个节点的激活函数类型、学习率、轮回次数、每次轮回的样本数等等。
- 业界习惯把内部参数称为参数,外部参数称为超参数
-
前向传播
将单个样本的 3 个输入特征送入神经网络的输入层后,神经网络会逐层计算到输出层,最终得到神经网络预测的 3 个输出特征。计算过程中所使用的参数就是内部参数,所有的隐藏层与输出层的神经元都有内部参数,以第 1 层的第 1 个神经元,如下图所示。

该神经元节点的计算过程为y = ω1x1 + ω2x2 + ω3x3 + b你可以理解为,每一根线就是一个权重 ω,每一个神经元节点也都有它自己的偏置 b。当然,每个神经元节点在计算完后,由于这个方程是线性的,因此必须在外面套一个非线性的函数:y = σ(ω1x1 + ω2x2 + ω3x3 + b),σ被称为激活函数。如果你不套非线性函数,那么即使 10 层的网络,也可以用 1 层就拟合出同样的方程。 -
反向传播
- 经过前向传播,网络会根据当前的内部参数计算出输出特征的预测值。但是这个预测值与真实值直接肯定有差距,因此需要一个损失函数来计算这个差距。例如,求预测值与真实值之间差的绝对值,就是一个典型的损失函数。
- 损失函数计算好后,逐层退回求梯度,这个过程很复杂,原理不必掌握,大致意思就是,看每一个内部参数是变大还是变小,才会使得损失函数变小。这样就达到了优化内部参数的目的
- 在这个过程中,有一个外部参数叫学习率。学习率越大,内部参数的优化越快,但过大的学习率可能会使损失函数越过最低点,并在谷底反复横跳。因此,在网络的训练开始之前,选择一个合适的学习率很重要。
- batch_size
前向传播与反向传播一次时,有三种情况:
- 批量梯度下降(Batch Gradient Descent,BGD),把所有样本一次性输入进网络,这种方式计算量开销很大,速度也很慢。
- 随机梯度下降(Stochastic Gradient Descent,SGD),每次只把一个样本输入进网络,每计算一个样本就更新参数。这种方式虽然速度比较快,但是收敛性能差,可能会在最优点附近震荡,两次参数的更新也有可能抵消。
- 小批量梯度下降(Mini-Batch Gradient Decent,MBGD)是为了中和上面二者而生,这种办法把样本划分为若干个批,按批来更新参数。
所以,batch_size 即一批中的样本数,也是一次喂进网络的样本数。此外,由于 Batch Normalization 层(用于将每次产生的小批量样本进行标准化)的存在,batch_size 一般设置为 2 的幂次方,并且不能为 1。
PS:PyTorch 实现时只支持批量与小批量,不支持单个样本的输入方式。PyTorch 里的 torch.optim.SGD 只表示梯度下降,批量与小批量见第四、五章
- epochs
1 个 epoch 就是指全部样本进行 1 次前向传播与反向传播。
假设有 10240 个训练样本,batch_size 是 1024,epochs 是 5。那么:
- 全部样本将进行 5 次前向传播与反向传播;
- 1 个 epoch,将发生 10 次(10240/1024)前向传播与反向传播;
- 一共发生 50 次(10*5)前向传播和反向传播。
测试网络
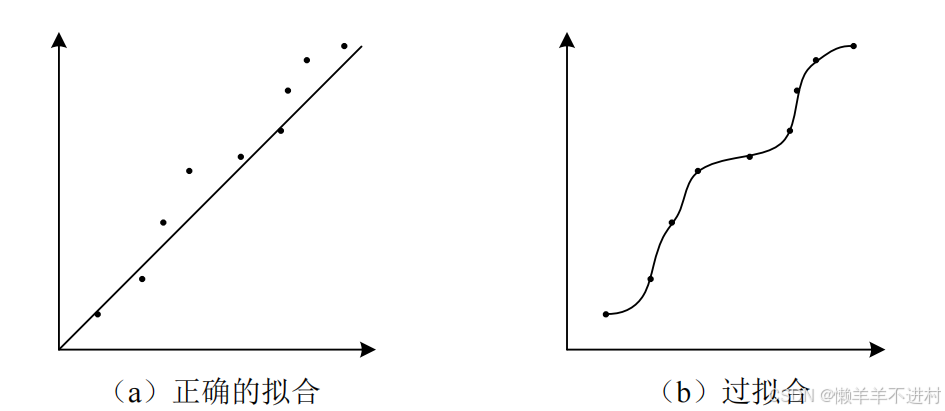
为了防止训练的网络过拟合,因此需要拿出少量的样本进行测试。过拟合的意思是:网络优化好的内部参数只能对训练样本有效,换成其它就寄。以线性回归为例,过拟合下图b所示
当网络训练好后,拿出测试集的输入,进行 1 次前向传播后,将预测的输出与测试集的真实输出进行对比,查看准确率。(测试集就不需要反向传播了,反向传播只是为了优化参数)
使用网络
真正使用网络进行预测时,样本只知输入,不知输出。直接将样本的输入进行 1 次前向传播,即可得到预测的输出。
DNN实现
torch.nn 提供了搭建网络所需的所有组件,nn 即 Neural Network 神经网络。因此,可以单独给 torch.nn 一个别名,即 import torch.nn as nn。
import torch
import torch.nn as nn
import matplotlib.pyplot as plt
%matplotlib inline
# 展示高清图
from matplotlib_inline import backend_inline
backend_inline.set_matplotlib_formats('svg')
制作数据集
在训练之前,要准备好训练集的样本。这里生成 10000 个样本,设定 3 个输入特征与 3 个输出特征,其中:
- 每个输入特征相互独立,均服从均匀分布;
- 当(X1+X2+X3)< 1 时,Y1 为 1,否则 Y1 为 0;
- 当 1<(X1+X2+X3)<2 时,Y2 为 1,否则 Y2 为 0;
- 当(X1+X2+X3)>2 时,Y3 为 1,否则 Y3 为 0;
- .float()将布尔型张量转化为浮点型张量。
# 生成数据集
X1 = torch.rand(10000,1) # 输入特征 1
X2 = torch.rand(10000,1) # 输入特征 2
X3 = torch.rand(10000,1) # 输入特征 3
Y1 = ( (X1+X2+X3)<1 ).float() # 输出特征 1
Y2 = ( (1<(X1+X2+X3)) & ((X1+X2+X3)<2) ).float() # 输出特征 2
Y3 = ( (X1+X2+X3)>2 ).float() # 输出特征 3
Data = torch.cat([X1,X2,X3,Y1,Y2,Y3],axis=1) # 整合数据集
Data = Data.to('cuda:0') # 把数据集搬到 GPU 上
Data.shape #OUT:torch.Size([10000, 6])
事实上,数据的 3 个输出特征组合起来是一个 One-Hot 编码(独热编码)。
# 划分训练集与测试集
train_size = int(len(Data) * 0.7) # 训练集的样本数量
test_size = len(Data) - train_size # 测试集的样本数量
Data = Data[torch.randperm( Data.size(0)) , : ] # 打乱样本的顺序 防止有些数据具有先后顺序
train_Data = Data[ : train_size , : ] # 训练集样本
test_Data = Data[ train_size : , : ] # 测试集样本
train_Data.shape, test_Data.shape #OUT:(torch.Size([7000, 6]), torch.Size([3000, 6]))
以上的代码属于通用型代码,便于我们手动分割训练集与测试集。
搭建神经网络
- 搭建神经网络时,以 nn.Module 作为父类,我们自己的神经网络可直接继承父类的方法与属性,nn.Module 中包含网络各个层的定义。
- 在定义的神经网络子类中,通常包含__init__特殊方法与 forward 方法。__init__特殊方法用于构造自己的神经网络结构,forward 方法用于将输入数据进行前向传播。由于张量可以自动计算梯度,所以不需要出现反向传播方法。
class DNN(nn.Module):
def __init__(self):
''' 搭建神经网络各层 '''
super(DNN,self).__init__()
self.net = nn.Sequential( # 按顺序搭建各层
nn.Linear(3, 5), nn.ReLU(), # 第 1 层:全连接层
nn.Linear(5, 5), nn.ReLU(), # 第 2 层:全连接层
nn.Linear(5, 5), nn.ReLU(), # 第 3 层:全连接层
nn.Linear(5, 3) # 第 4 层:全连接层
)
def forward(self, x):
''' 前向传播 '''
y = self.net(x) # x 即输入数据
return y # y 即输出数据
model = DNN().to('cuda:0') # 创建子类的实例,并搬到 GPU 上
model # 查看该实例的各层 #OUT:DNN(
# (net): Sequential(
# (0): Linear(in_features=3, out_features=5, bias=True)
# (1): ReLU()
# (2): Linear(in_features=5, out_features=5, bias=True)
# (3): ReLU()
# (4): Linear(in_features=5, out_features=5, bias=True)
# (5): ReLU()
# (6): Linear(in_features=5, out_features=3, bias=True)
# )
# )
在上面的 nn.Sequential()函数中,每一个隐藏层后都使用了 RuLU 激活函数,各层的神经元节点个数分别是:3、5、5、5、3。
PS:输入层有 3 个神经元、输出层有 3 个神经元,这不是巧合,是有意而为之。输入层的神经元数量必须与每个样本的输入特征数量一致,输出层的神经元数量必须与每个样本的输出特征数量一致。
网络的内部参数
神经网络的内部参数是权重与偏置,内部参数在神经网络训练之前会被赋予随机数,随着训练的进行,内部参数会逐渐迭代至最佳值,现对参数进行查看。
# 查看内部参数(非必要)
for name, param in model.named_parameters():
print(f"参数:{
name}\n 形状:{
param.shape}\n 数值:{
param}\n")
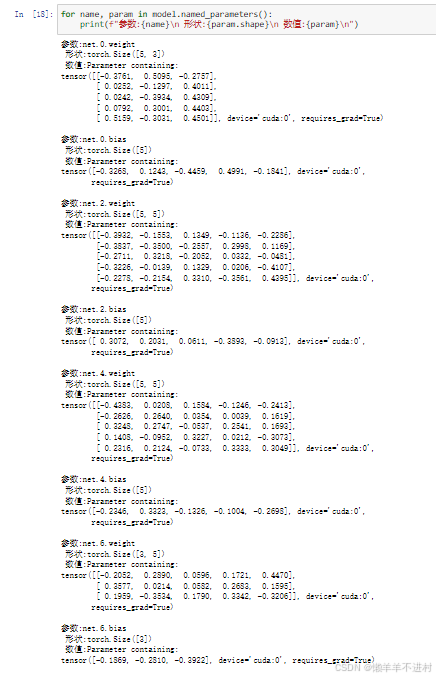
代码一共给了我们 8 个参数,其中参数与形状的结果如下表所示,考虑到其数值初始状态时是随机的(如 Xavier 初始值、He 初始值),此处不讨论。
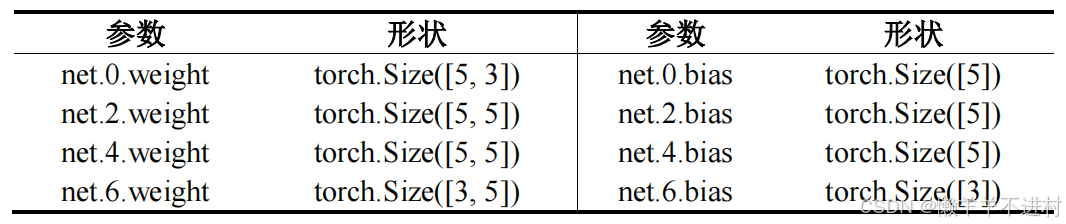
可见,具有权重与偏置的地方只有 net.0、net.2、net.4、net.6,易知这几个地方其实就是所有的隐藏层与输出层,这符合理论。
- 首先,net.0.weight 的权重形状为[5, 3],5 表示它自己的节点数是 5,3 表示与之连接的前一层的节点数为 3
- 其次,由于前面里进行了 model =DNN().to(‘cuda:0’)操作,因此所有的内部参数都自带device=‘cuda:0’。
- 最后,注意到 requires_grad=True,说明所有需要进行反向传播的内部参数(即权重与偏置)都打开了张量自带的梯度计算功能。
网络的外部参数
外部参数即超参数,这是调参师们关注的重点。搭建网络时的超参数有:网络的层数、各隐藏层节点数、各节点激活函数、内部参数的初始值等。训练网络的超参数有:如损失函数、学习率、优化算法、batch_size、epochs 等。
- 激活函数
PyTorch 1.12.0 版本进入 https://pytorch.org/docs/1.12/nn.html 搜索 Non-linear Activations,即可查看 torch 内置的所有非线性激活函数(以及各种类型的层)。(网站打开默认为1.12版本,如果你的torch不是1.12,请在网页左上角自行更改) - 损失函数
进入 https://pytorch.org/docs/1.12/nn.html 搜索 Loss Functions,即可查看 torch
内置的所有损失函数。
# 损失函数的选择
loss_fn = nn.MSELoss()
- 学习率与优化算法
进入 https://pytorch.org/docs/1.12/optim.html,可查看 torch 的所有优化算法(网站打开默认为1.12版本,如果你的torch不是1.12,请在网页左上角自行更改)
# 优化算法的选择
learning_rate = 0.01 # 设置学习率
optimizer = torch.optim.SGD(model.parameters(), lr=learning_rate)
注:PyTorch 实现时只支持 BGD 或 MBGD,不支持单个样本的输入方式。这里的 torch.optim.SGD 只表示梯度下降,具体的批量与小批量见第四、五章。
训练网络
# 训练网络
epochs = 1000 # 所有样本轮回1000次
losses = [] # 记录损失函数变化的列表
# 给训练集划分输入与输出
X = train_Data[ : , :3 ] # 前 3 列为输入特征
Y = train_Data[ : , -3: ] # 后 3 列为输出特征
for epoch in range(epochs):
Pred = model(X) # 一次前向传播(批量)
loss = loss_fn(Pred, Y) # 计算损失函数
losses.append(loss.item()) # 记录损失函数的变化
optimizer.zero_grad() # 清理上一轮滞留的梯度
loss.backward() # 一次反向传播
optimizer.step() # 优化内部参数
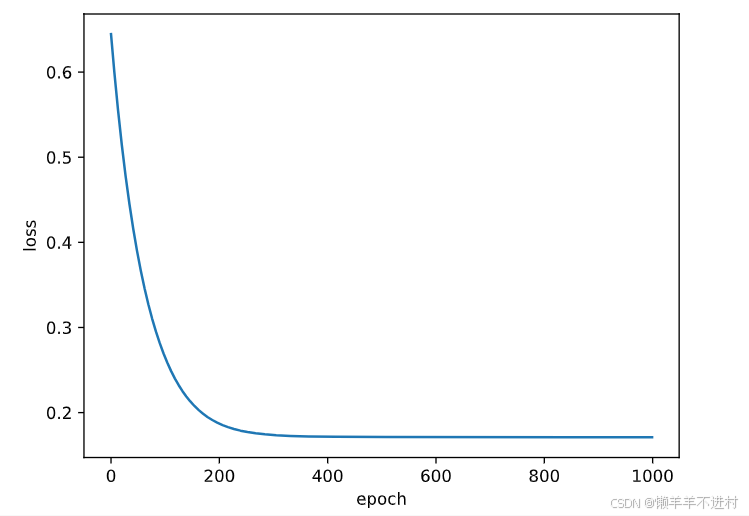
Fig = plt.figure()
plt.plot(range(epochs), losses)
plt.ylabel('loss'), plt.xlabel('epoch')
plt.show()
PS:losses.append(loss.item())中,.append()是指在列表 losses 后再附加 1 个元素,而.item()方法可将 PyTorch 张量退化为普通元素。
测试网络
测试时,只需让测试集进行 1 次前向传播即可,这个过程不需要计算梯度,因此可以在该局部关闭梯度,该操作使用 with torch.no_grad():命令。
考虑到输出特征是独热编码,而预测的数据一般都是接近 0 或 1 的小数,为了能让预测数据与真实数据之间进行比较,因此要对预测数据进行规整。例如,使用 Pred[:,torch.argmax(Pred, axis=1)] = 1 命令将每行最大的数置 1,接着再使用Pred[Pred!=1] = 0 将不是 1 的数字置 0,这就使预测数据与真实数据的格式相同。
# 测试网络
# 给测试集划分输入与输出
X = test_Data[:, :3] # 前 3 列为输入特征
Y = test_Data[:, -3:] # 后 3 列为输出特征
with torch.no_grad(): # 该局部关闭梯度计算功能
Pred = model(X) # 一次前向传播(批量)
Pred[:,torch.argmax(Pred, axis=1)] = 1
Pred[Pred!=1] = 0
correct = torch.sum( (Pred == Y).all(1) ) # 预测正确的样本
total = Y.size(0) # 全部的样本数量
print(f'测试集精准度: {
100*correct/total} %')
在计算 correct 时需要动点脑筋。
首先,(Pred == Y)计算预测的输出与真实的输出的各个元素是否相等,返回一个 3000 行、3 列的布尔型张量;
其次,(Pred == Y).all(1)检验该布尔型张量每一行的 3 个数据是否都是 True,对于全是 True 的样本行,结果就是 True,否则是 False。all(1)中的 1 表示按“行”扫描,最终返回一个形状为 3000 的一阶张量。
最后,torch.sum( (Pred == Y).all(1) )的意思就是看这 3000 个向量相加,True会被当作 1,False 会被当作 0,这样相加刚好就是预测正确的样本数。
保存与导入网络
现在我们要考虑一件大事,那就是有时候训练一个大网络需要几天,那么必须要把整个网络连同里面的优化好的内部参数给保存下来。
现以本章前面的代码为例,当网络训练好后,将网络以文件的形式保存下来,并通过文件导入给另一个新网络,让新网络去跑测试集,看看测试集的准确率是否也是 67%。
- 保存网络
通过“torch.save(模型名, ‘文件名.pth’)”命令,可将该模型完整的保存至Jupyter 的工作路径下
# 保存网络
torch.save(model, 'model.pth')
- 导入网络
通过“新网络 = torch.load('文件名.pth ')”命令,可将该模型完整的导入给新网络。
# 把模型赋给新网络
new_model = torch.load('model.pth')
现在,new_model 就与 model 完全一致,可以直接去跑测试集。
- 用新模型进行测试
# 测试网络
# 给测试集划分输入与输出
X = test_Data[:, :3] # 前 3 列为输入特征
Y = test_Data[:, -3:] # 后 3 列为输出特征
with torch.no_grad(): # 该局部关闭梯度计算功能
Pred = new_model(X) # 用新模型进行一次前向传播
Pred[:,torch.argmax(Pred, axis=1)] = 1
Pred[Pred!=1] = 0
correct = torch.sum( (Pred == Y).all(1) ) # 预测正确的样本
total = Y.size(0) # 全部的样本数量
print(f'测试集精准度: {
100*correct/total} %') #OUT:测试集精准度: 67.16666412353516 %
批量梯度下降
本小节将完整、快速地再展示一遍批量梯度下降(BGD)的全过程。
import numpy as np
import pandas as pd
import torch
import torch.nn as nn
import matplotlib.pyplot as plt
%matplotlib inline
# 展示高清图
from matplotlib_inline import backend_inline
backend_inline.set_matplotlib_formats('svg')
制作数据集
这一次的数据集将从 Excel 中导入,需要 Pandas 库中的 pd.read_csv()函数,这在前一篇文章《Python基础——Pandas库》第六章中有详细的介绍
# 准备数据集
df = pd.read_csv('Data.csv', index_col=0) # 导入数据
arr = df.values # Pandas 对象退化为 NumPy 数组
arr = arr.astype(np.float32) # 转为 float32 类型数组
ts = torch.tensor(arr) # 数组转为张量
ts = ts.to('cuda') # 把训练集搬到 cuda 上
ts.shape #OUT:torch.Size([759, 9])
PS:将 arr 数组转为了 np.float32 类型这一步必不可少,没有的话计算过程会出现一些数据类型不兼容的情况。
# 划分训练集与测试集
train_size = int(len(ts) * 0.7) # 训练集的样本数量
test_size = len(ts) - train_size # 测试集的样本数量
ts = ts[ torch.randperm( ts.size(0) ) , : ] # 打乱样本的顺序
train_Data = ts[ : train_size , : ] # 训练集样本
test_Data = ts[ train_size : , : ] # 测试集样本
train_Data.shape, test_Data.shape #OUT:(torch.Size([531, 9]), torch.Size([228, 9]))
搭建神经网络
PS:前面的数据集,输入有 8 个特征,输出有 1 个特征,那么神经网络的输入层必须有 8 个神经元,输出层必须有 1 个神经元。
隐藏层的层数、各隐藏层的节点数属于外部参数(超参数),可以自行设置。
class DNN(nn.Module):
def __init__(self):
''' 搭建神经网络各层 '''
super(DNN,self).__init__()
self.net = nn.Sequential( # 按顺序搭建各层
nn.Linear(8, 32), nn.Sigmoid(), # 第 1 层:全连接层
nn.Linear(32, 8), nn.Sigmoid(), # 第 2 层:全连接层
nn.Linear(8, 4), nn.Sigmoid(), # 第 3 层:全连接层
nn.Linear(4, 1), nn.Sigmoid() # 第 4 层:全连接层
)
def forward(self, x):
''' 前向传播 '''
y = self.net(x) # x 即输入数据
return y # y 即输出数据
model = DNN().to('cuda:0') # 创建子类的实例,并搬到 GPU 上
训练网络
# 损失函数的选择
loss_fn = nn.BCELoss(reduction='mean')
# 优化算法的选择
learning_rate = 0.005 # 设置学习率
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate)
# 训练网络
epochs = 5000
losses = [] # 记录损失函数变化的列表
# 给训练集划分输入与输出
X = train_Data[ : , : -1 ] # 前 8 列为输入特征
Y = train_Data[ : , -1 ].reshape((-1,1)) # 后 1 列为输出特征
# 此处的.reshape((-1,1))将一阶张量升级为二阶张量
for epoch in range(epochs):
Pred = model(X) # 一次前向传播(批量)
loss = loss_fn(Pred, Y) # 计算损失函数
losses.append(loss.item()) # 记录损失函数的变化
optimizer.zero_grad() # 清理上一轮滞留的梯度
loss.backward() # 一次反向传播
optimizer.step() # 优化内部参数
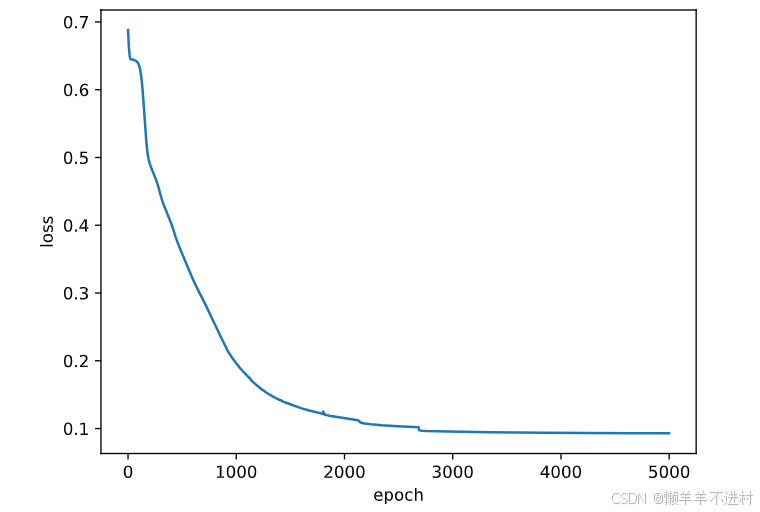
Fig = plt.figure()
plt.plot(range(epochs), losses)
plt.ylabel('loss')
plt.xlabel('epoch')
plt.show()
测试网络
注意,真实的输出特征都是 0 或 1,因此这里需要对网络预测的输出 Pred 进行处理,Pred 大于 0.5 的部分全部置 1,小于 0.5 的部分全部置 0.
# 测试网络
# 给测试集划分输入与输出
X = test_Data[ : , : -1 ] # 前 8 列为输入特征
Y = test_Data[ : , -1 ].reshape((-1,1)) # 后 1 列为输出特征
with torch.no_grad(): # 该局部关闭梯度计算功能
Pred = model(X) # 一次前向传播(批量)
Pred[Pred>=0.5] = 1
Pred[Pred<0.5] = 0
correct = torch.sum( (Pred == Y).all(1) ) # 预测正确的样本
total = Y.size(0) # 全部的样本数量
print(f'测试集精准度: {
100*correct/total} %') #OUT:测试集精准度: 71.0526351928711 %
小批量梯度下降
本章将继续使用第四章中的 Excel 与神经网络结构,但使用小批量训练。在使用小批量梯度下降时,必须使用 3 个 PyTorch 内置的实用工具(utils):
- DataSet 用于封装数据集
- DataLoader 用于加载数据不同的批次
- random_split 用于划分训练集与测试集
import numpy as np
import pandas as pd
import torch
import torch.nn as nn
from torch.utils.data import Dataset
from torch.utils.data import DataLoader
from torch.utils.data import random_split
import matplotlib.pyplot as plt
%matplotlib inline
# 展示高清图
from matplotlib_inline import backend_inline
backend_inline.set_matplotlib_formats('svg')
制作数据集
在封装我们的数据集时,必须继承实用工具(utils)中的 DataSet 的类,这个过程需要重写__init__、getitem、__len__三个方法,分别是为了加载数据集、获取数据索引、获取数据总量。
# 制作数据集
class MyData(Dataset): # 继承 Dataset 类
def __init__(self, filepath):
df = pd.read_csv(filepath, index_col=0) # 导入数据
arr = df.values # 对象退化为数组
arr = arr.astype(np.float32) # 转为 float32 类型数组
ts = torch.tensor(arr) # 数组转为张量
ts = ts.to('cuda') # 把训练集搬到 cuda 上
self.X = ts[ : , : -1 ] # 前 8 列为输入特征
self.Y = ts[ : , -1 ].reshape((-1,1)) # 后 1 列为输出特征
self.len = ts.shape[0] # 样本的总数
def __getitem__(self, index):
return self.X[index], self.Y[index]
def __len__(self):
return self.len
小批次训练时,输入特征与输出特征的划分必须写在上述代码的子类里面。
# 划分训练集与测试集
Data = MyData('Data.csv')
train_size = int(len(Data) * 0.7) # 训练集的样本数量
test_size = len(Data) - train_size # 测试集的样本数量
train_Data, test_Data = random_split(Data, [train_size, test_size])
我们利用实用工具(utils)里的 random_split可轻松实现了训练集与测试集数据的划分
# 批次加载器
train_loader = DataLoader(dataset=train_Data, shuffle=True, batch_size=128)
test_loader = DataLoader(dataset=test_Data, shuffle=False, batch_size=64)
实用工具(utils)里的 DataLoader 可以在接下来的训练中进行小批次的载入数据,shuffle 用于在每一个 epoch 内先洗牌再分批。
搭建神经网络
class DNN(nn.Module):
def __init__(self):
''' 搭建神经网络各层 '''
super(DNN,self).__init__()
self.net = nn.Sequential( # 按顺序搭建各层
nn.Linear(8, 32), nn.Sigmoid(), # 第 1 层:全连接层
nn.Linear(32, 8), nn.Sigmoid(), # 第 2 层:全连接层
nn.Linear(8, 4), nn.Sigmoid(), # 第 3 层:全连接层
nn.Linear(4, 1), nn.Sigmoid() # 第 4 层:全连接层
)
def forward(self, x):
''' 前向传播 '''
y = self.net(x) # x 即输入数据
return y # y 即输出数据
model = DNN().to('cuda:0') # 创建子类的实例,并搬到 GPU 上
训练网络
# 损失函数的选择
loss_fn = nn.BCELoss(reduction='mean')
# 优化算法的选择
learning_rate = 0.005 # 设置学习率
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate)
# 训练网络
epochs = 500
losses = [] # 记录损失函数变化的列表
for epoch in range(epochs):
for (x, y) in train_loader: # 获取小批次的 x 与 y
Pred = model(x) # 一次前向传播(小批量)
loss = loss_fn(Pred, y) # 计算损失函数
losses.append(loss.item()) # 记录损失函数的变化
optimizer.zero_grad() # 清理上一轮滞留的梯度
loss.backward() # 一次反向传播
optimizer.step() # 优化内部参数
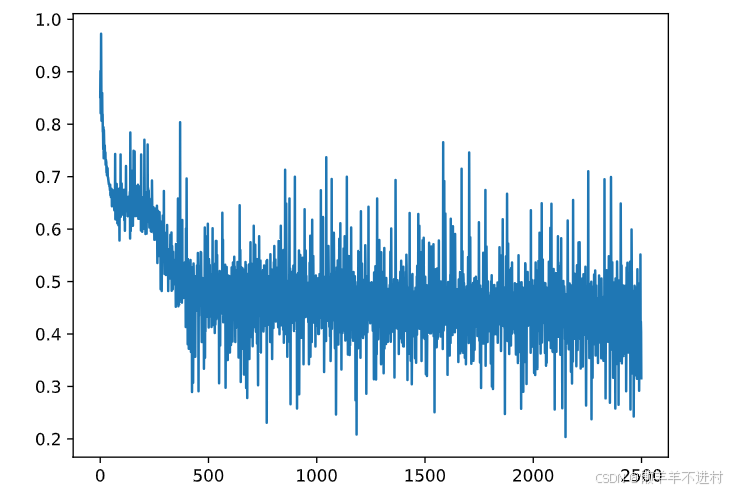
Fig = plt.figure()
plt.plot(range(len(losses)), losses)
plt.show()
测试网络
# 测试网络
correct = 0
total = 0
with torch.no_grad(): # 该局部关闭梯度计算功能
for (x, y) in test_loader: # 获取小批次的 x 与 y
Pred = model(x) # 一次前向传播(小批量)
Pred[Pred>=0.5] = 1
Pred[Pred<0.5] = 0
correct += torch.sum( (Pred == y).all(1) )
total += y.size(0)
print(f'测试集精准度: {
100*correct/total} %') #OUT:测试集精准度: 73.68421173095703 %
手写数字识别
手写数字识别数据集(MNIST)是机器学习领域的标准数据集,它被称为机器学习领域的“Hello World”,只因任何 AI 算法都可以用此标准数据集进行检验。MNIST 内的每一个样本都是一副二维的灰度图像,如下图所示。
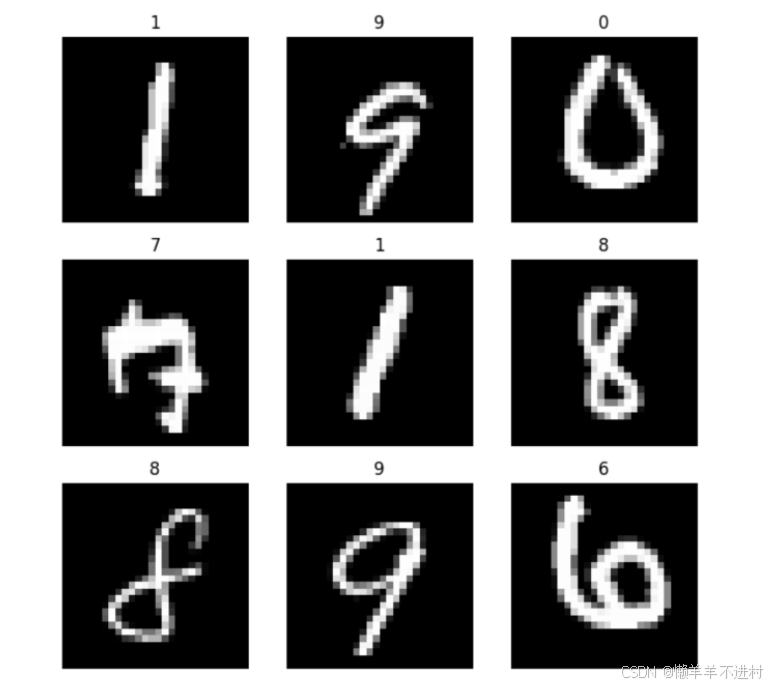
- 在 MNIST 中,模型的输入是一副图像,模型的输出就是一个与图像中对应的数字(0 至 9 之间的一个整数,不是独热编码)。
- 我们不用手动将输出转换为独热编码,PyTorch 会在整个过程中自动将数据集的输出转换为独热编码.只有在最后测试网络时,我们对比测试集的预测输出与真实输出时,才需要注意一下。
- 某一个具体的样本如下图所示,每个图像都是形状为28*28的二维数组。
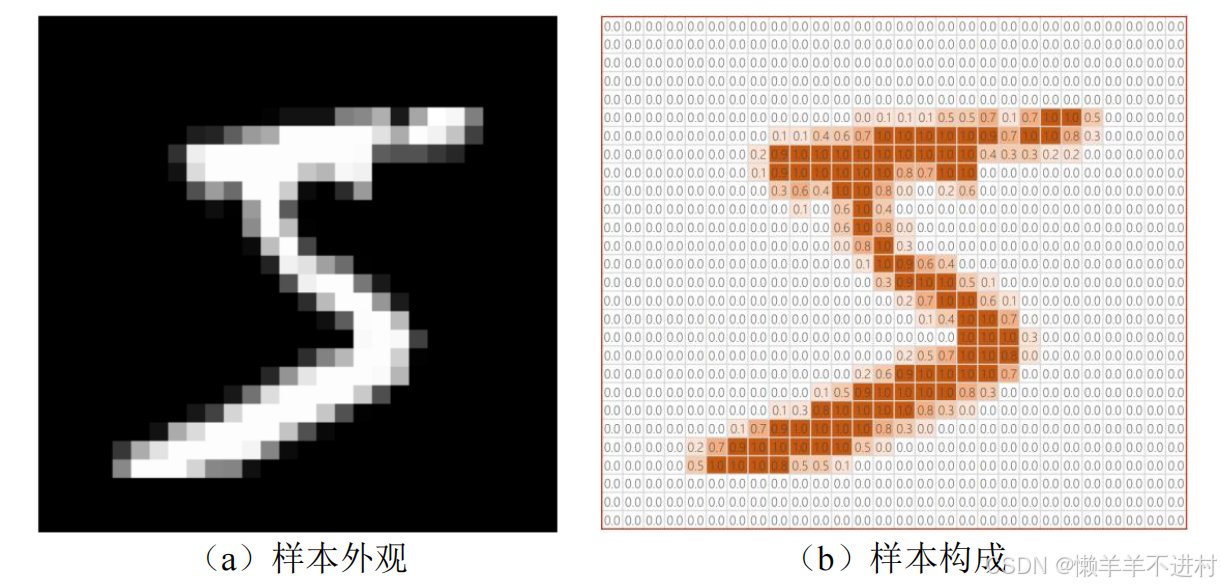
在这种多分类问题中,神经网络的输出层需要一个 softmax 激活函数,它可以把输出层的数据归一化到 0-1 上,且加起来为 1,这样就模拟出了概率的意思。
制作数据集
这一章我们需要在 torchvision 库中分别下载训练集与测试集,因此需要从torchvision 库中导入 datasets 以下载数据集,下载前需要借助 torchvision 库中的 transforms 进行图像转换,将数据集变为张量,并调整数据集的统计分布。
由于不需要手动构建数据集,因此不导入 utils 中的 Dataset;又由于训练集与测试集是分开下载的,因此不导入 utils 中的 random_split。
import torch
import torch.nn as nn
from torch.utils.data import DataLoader
from torchvision import transforms
from torchvision import datasets
import matplotlib.pyplot as plt
%matplotlib inline
# 展示高清图
from matplotlib_inline import backend_inline
backend_inline.set_matplotlib_formats('svg')
在下载数据集之前,要设定转换参数:transform,该参数里解决两个问题:
- ToTensor:将图像数据转为张量,且调整三个维度的顺序为 CWH;C表示通道数,二维灰度图像的通道数为 1,三维 RGB 彩图的通道数为 3。
- Normalize:将神经网络的输入数据转化为标准正态分布,训练更好;根据统计计算,MNIST 训练集所有像素的均值是 0.1307、标准差是 0.3081。
# 制作数据集
# 数据集转换参数
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize(0.1307, 0.3081)
])
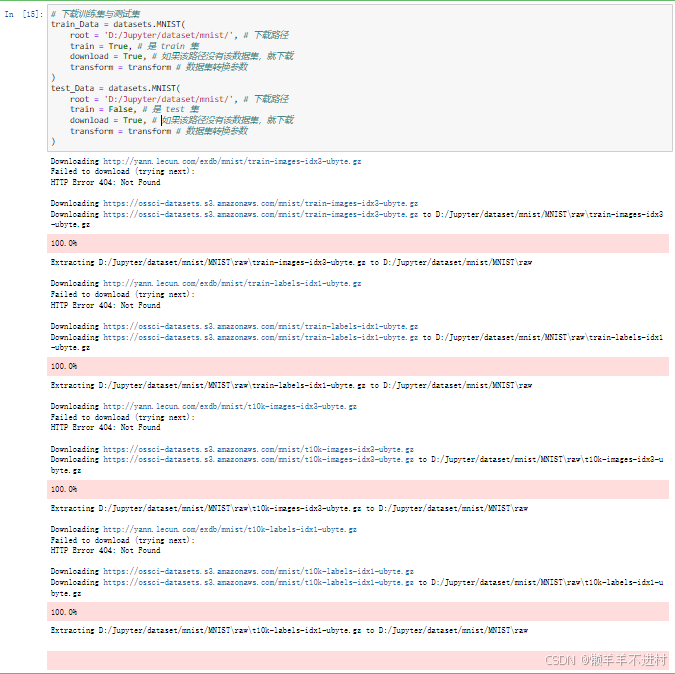
# 下载训练集与测试集
train_Data = datasets.MNIST(
root = 'D:/Jupyter/dataset/mnist/', # 下载路径
train = True, # 是 train 集
download = True, # 如果该路径没有该数据集,就下载
transform = transform # 数据集转换参数
)
test_Data = datasets.MNIST(
root = 'D:/Jupyter/dataset/mnist/', # 下载路径
train = False, # 是 test 集
download = True, # 如果该路径没有该数据集,就下载
transform = transform # 数据集转换参数
)
下载输出下图所示:
# 批次加载器
train_loader = DataLoader(train_Data, shuffle=True, batch_size=64)
test_loader = DataLoader(test_Data, shuffle=False, batch_size=64)
搭建神经网络
每个样本的输入都是形状为2828的二维数组,那么对于 DNN 来说,输入层的神经元节点就要有2828=784个;输出层使用独热编码,需要 10 个节点。
class DNN(nn.Module):
def __init__(self):
''' 搭建神经网络各层 '''
super(DNN,self).__init__()
self.net = nn.Sequential( # 按顺序搭建各层
nn.Flatten(), # 把图像铺平成一维
nn.Linear(784, 512), nn.ReLU(), # 第 1 层:全连接层
nn.Linear(512, 256), nn.ReLU(), # 第 2 层:全连接层
nn.Linear(256, 128), nn.ReLU(), # 第 3 层:全连接层
nn.Linear(128, 64), nn.ReLU(), # 第 4 层:全连接层
nn.Linear(64, 10) # 第 5 层:全连接层
)
def forward(self, x):
''' 前向传播 '''
y = self.net(x) # x 即输入数据
return y # y 即输出数据
model = DNN().to('cuda:0') # 创建子类的实例,并搬到 GPU 上
训练网络
# 损失函数的选择
loss_fn = nn.CrossEntropyLoss() # 自带 softmax 激活函数
# 优化算法的选择
learning_rate = 0.01 # 设置学习率
optimizer = torch.optim.SGD(
model.parameters(),
lr = learning_rate,
momentum = 0.5
)
给优化器了一个新参数 momentum(动量),它使梯度下降算法有了力与惯性,该方法给人的感觉就像是小球在地面上滚动一样。
# 训练网络
epochs = 5
losses = [] # 记录损失函数变化的列表
for epoch in range(epochs):
for (x, y) in train_loader: # 获取小批次的 x 与 y
x, y = x.to('cuda:0'), y.to('cuda:0')
Pred = model(x) # 一次前向传播(小批量)
loss = loss_fn(Pred, y) # 计算损失函数
losses.append(loss.item()) # 记录损失函数的变化
optimizer.zero_grad() # 清理上一轮滞留的梯度
loss.backward() # 一次反向传播
optimizer.step() # 优化内部参数
Fig = plt.figure()
plt.plot(range(len(losses)), losses)
plt.show()

PS:由于数据集内部进不去,只能在循环的过程中取出一部分样本,就立即将之搬到 GPU 上。
测试网络
# 测试网络
correct = 0
total = 0
with torch.no_grad(): # 该局部关闭梯度计算功能
for (x, y) in test_loader: # 获取小批次的 x 与 y
x, y = x.to('cuda:0'), y.to('cuda:0')
Pred = model(x) # 一次前向传播(小批量)
_, predicted = torch.max(Pred.data, dim=1)
correct += torch.sum( (predicted == y) )
total += y.size(0)
print(f'测试集精准度: {
100*correct/total} %') #OUT:测试集精准度: 96.65999603271484 %
a, b = torch.max(Pred.data, dim=1)的意思是,找出 Pred 每一行里的最大值,数值赋给 a,所处位置赋给 b。因此上述代码里的 predicted 就相当于把独热编码转换回了普通的阿拉伯数字,这样一来可以直接与 y 进行比较。
由于此处 predicted 与 y 是一阶张量,因此 correct 行的结尾不能加.all(1)。