前言:感受野是卷积神经网络 (CNN) 中一个重要的概念,它表示 CNN 每一层输出的特征图上的像素点在输入图像上映射的区域。感受野的大小和形状直接影响到网络对输入图像的感知范围和精度,进而调整网络结构、卷积核大小和步长等参数,以改善网络的性能。
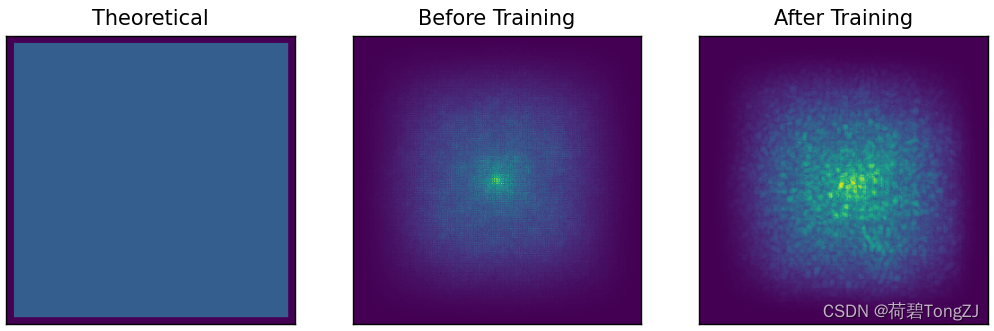
效果:本文的实验在 torchvision.models 中的 resnet18 上进行,分别绘制了理论感受野、训练前感受野、训练后感受野

开发环境:PyTorch 1.9.0
适用模型:最大池化层使用 nn.MaxPool 而不是 torch.nn.functional.max_pool 的模型
声明:本文所使用代码不开源,觉得本文的思路可行的话,请加 QQ - 1398173074 购买 (¥40,注明来意)
商品仅包含一份 120+ 行的代码。本文所使用的代码基于 torch、matplotlib 以及其它标准库。其中包含一个名为 ReceptiveField 的类,用于绘制图像识别网络的感受野
代码实现
ReceptiveField 提供了以下函数:
- _replace:将 MaxPool (这种求最大值的操作会影响感受野的正确性) 替换为 AvgPool
- __init__:注册前向传播的“挂钩”,用于提取目标层的特征图用于反向传播
- _backward:前向推导图像,利用“挂钩”获取特征图,从特征图中心点反向传播梯度,进行一系列处理后将梯度图转换为感受野图
- theoretical:结合 _backward 函数求解理论感受野,其结果经过 sum、sqrt 之后即为理论感受野的尺寸
- effective:默认情况下结合 _backward 函数求解训练前感受野 (即随机权重的模型);给定 state_dict 时将加载权重,求解训练后的感受野
- compare:使用 matplotlib 绘制理论感受野、训练前感受野、训练后感受野
class ReceptiveField:
""" :param model: 需要进行可视化的模型
:param tar_layer: 感兴趣的层, 其所输出特征图需有 4 个维度 [B, C, H, W]
:param img_size: 测试时使用的图像尺寸"""
def make_input(self, n_sample): ...
def __init__(self,
model: nn.Module,
tar_layer: Union[int, nn.Module],
img_size: Union[int, Tuple[int, int]],
use_cuda: bool = False,
use_copy: bool = False): ...
def compare(self, theoretical=True, original=True, state_dict=None, **imshow_kw):
""" :param theoretical: 是否绘制理论感受野
:param original: 是否绘制训练前的感受野
:param state_dict: 模型权值, 如果提供则绘制训练后的感受野"""
def effective(self, state_dict=None):
""" :param state_dict: 模型权值, 如果提供则绘制训练后的感受野"""
def theoretical(self, light=1.):
""" :param light: 理论感受野的亮度 [0, 1]"""
def _replace(self, model): ...
def _backward(self, x): ...
在本文的示例中,对 resnet18 的 layer3 进行了可视化,并计算出理论感受野的尺寸为 211×211
if __name__ == "__main__":
from torchvision.models import resnet18
# Step 1: 刚完成初始化的模型, 权重<完全随机>, 表 "训练前"
m = resnet18()
# Step 2: 训练完成后的 state_dict, 等待 ReceptiveField 加载
state_dict = resnet18(pretrained=True).state_dict()
# Step 3: 绘制感受野 (设置 ReceptiveField 的 use_copy=True, 将创建模型的深拷贝副本)
with ReceptiveField(m, tar_layer=m.layer3, img_size=256, use_copy=True) as r:
r.compare(state_dict=state_dict)
# 理论感受野的尺寸
s = round(r.theoretical().sum() ** 0.5)
print(f"Theoretical RF: {s}×{s}")
plt.show()
# Step 4: 加载模型的参数
m.load_state_dict(state_dict)如果将 resnet18 中的某一个卷积改成空洞卷积,感受野将进一步增大到 243×243
if __name__ == "__main__":
from torchvision.models import resnet18
# Step 1: 刚完成初始化的模型, 权重<完全随机>, 表 "训练前"
m = resnet18()
print(m)
m.layer3[1].conv1.dilation = 2
m.layer3[1].conv1.padding = 2
# Step 2: 训练完成后的 state_dict, 等待 ReceptiveField 加载
state_dict = resnet18(pretrained=True).state_dict()
# Step 3: 绘制感受野 (设置 ReceptiveField 的 use_copy=True, 将创建模型的深拷贝副本)
with ReceptiveField(m, tar_layer=m.layer3, img_size=256, use_copy=True) as r:
r.compare(state_dict=state_dict)
# 理论感受野的尺寸
s = round(r.theoretical().sum() ** 0.5)
print(f"Theoretical RF: {s}×{s}")
plt.show()
# Step 4: 加载模型的参数
m.load_state_dict(state_dict)