在道路匹配中,交叉路口的匹配是最复杂的。常见的问题有三种,一是在错误的道路行驶一小段距离后,才跳到正确的路上;二是位置更新太慢,然后突然跳动;三是角度反映太慢。
匹配错误的原因有三种,一、优先匹配原来道路时,向前行驶了一段距离。二、以交叉路口为中心划定一个范围,在此范围内不做更新。三、现实中交叉路口和数据中的道路模型有差异(比如,交叉路口会有一些虚拟的道路)。四、GPS的误差。
位置更新慢的原因有两个:一是在交叉路口的行走轨迹和数据中的道路模型不完全相同,在数据中,两条路是必交叉于一点,而实际上在交叉点之前就已经开始拐弯,拐弯不一定经过交叉点。在没有完全到达新路之前,均有可能在交叉点前的路段上。二是为了回避匹配错误,而采取的延迟策略。
角度是利用前后点经纬度计算出来的,角度更新慢的原因,一是位置更新慢。导致变化慢,二是角度采取了折中策略,导致变化小。
在我们的开发过程中,尝试过多种数学方法来回避这些问题,如调整匹配的误差范围;增加对道路数据中通行属性的利用;对应交叉路口进行范围限制等等,最终效果都不甚理想。曾经有部分厂商,在汽车的轴承上安装转弯、倾斜传感器,并配合道路网数据和倾斜数据,以提高匹配的准度。
用于手机、PND的导航系统中,有什么低成本的方式,大大提高拐弯时的准度吗?
答案是,利用好GPS穿过来的角度和速度。在速度不是过低时,从GPS传过来的值是比较稳定的,可信度是很高的。
如果能够确定前方路口,并且在进入前方路口之前,将可能通行的道路都找出来,在距离前方交叉路口一定距离的地方,放弃以垂直牵引距离优先算法的匹配,改为利用GPS角度和速度变化趋势来进行道路匹配。
有一组实验数据,如果以25公里/时的速度,拐一个90度的弯,会接到四次明显的角度变化。如果速度提高到45公里/时,接到的角度更新次数是3次。
那么,如果我们在第一次角度发生明显改变时,利用角度所在的象限,排除一些不符合条件的候选道路,同时返回GPS角度,将经纬度更新到交叉点上。然后利用下一次,或下下次的GPS角度,进一步明确目标道路。如果交叉路口很复杂的时候,可以等到角度不再发生明显变化时,再确定最终的道路。
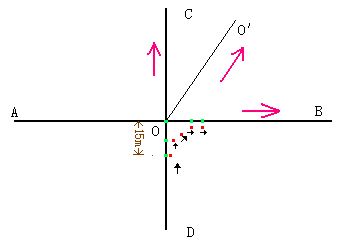
如上图中,汽车从D—>O—>B行驶,带方向的红色点是GPS模块得到轨迹点,在距离O点还有15m的时候,就采用交叉点特殊匹配算法。将前方可通行的道路作为候选道路,角度没有发生明显变化的时候,就优先匹配到原路段上,当第一次角度发生明显变化时,将点匹配到O点上,同时使用GPS得到的角度,根据此角度可将OC、OO'路段排除了。当第二次角度发生明显变化时,就可以确定OB为下一个将要行走的路段。
考虑到拐弯处,速度会一般会有明显变化,因此可以作为拐弯判断一个权值较低的判定因素。