Article Directory
This blog is mainly a summary of notes to design and manufacture a toy car. This car system can have the following functions: ultrasonic distance measurement, obstacle avoidance, motor speed control, Bluetooth control and other functions. Two modes are set for obstacle avoidance mode and follow. Mode, you can make another tracking mode, but if there is no place for bad debugging, there is no writing, but the principle is similar to the first two modes. The module also uses infrared modules, which can be 2 or 4 channels, and the difference is not big.
Module debugging part
1. Ultrasonic ranging module
Principle introduction and code realization of HC-SR04 ultrasonic ranging module
2. Motor speed control module
Principle introduction and code realization of pwm motor speed regulation
3. Motor drive module
Wiring usage and code realization of L298N motor drive module
4. Bluetooth control module
5. Liquid crystal display module
LED1602 LCD module introduction and its programming use
6. Synthetic voice broadcast module
Mode debugging part
1. Follow mode
//红外跟随模块
void InfraredFollow_Module(void)
{
//设置小车速度,中档起步
// Motor_SpeedSet(60000,0.8,0.8);
while(1){
//前面有障碍物,向前走
while(Infrared_StraightMod == 0){
Motor_GoForward();
delay_ms(5);
}
//左边有障碍,向左转
while(Infrared_LeftMod == 0){
Motor_TurnLeft(); //左转
delay_ms(5);
}
//右边有障碍,向右转
while(Infrared_RightMod == 0){
Motor_TurnRight(); //右转
delay_ms(5);
}
Motor_BeParking();
}
}
2. Obstacle avoidance mode
//红外避障模块
void InfraredAvoidance_Module(void)
{
//设置小车速度,中档起步
// Motor_SpeedSet(60000,0.8,0.8);
while(1){
Motor_GoForward();
//左边有障碍
while(Infrared_LeftMod == 0){
Motor_BeParking(); //停车
delay_ms(1000);
Motor_TurnRight(); //右转
delay_ms(1000);
}
//右边有障碍
while(Infrared_RightMod == 0){
Motor_BeParking(); //停车
delay_ms(1000);
Motor_TurnLeft(); //左转
delay_ms(1000);
}
//前面有障碍物,思路是先后退一点点,然后右转躲避
//还可以设置一个标志为,一次右转,一次左转;或者两到三次右转,然后一次左转
while(Infrared_StraightMod == 0){
Motor_BeParking(); //停车
delay_ms(1000);
Motor_GetBack(); //后退
delay_ms(1000);
Motor_BeParking(); //停车
delay_ms(1000);
Motor_TurnRight(); //右转
delay_ms(1000);
}
}
}
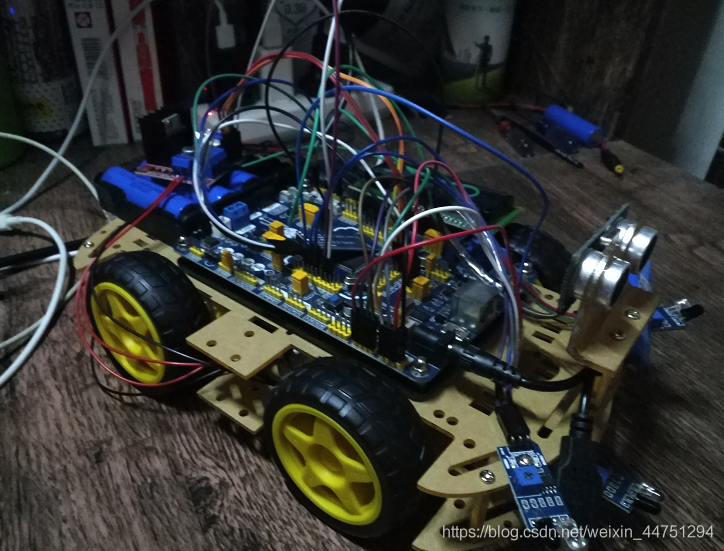
Physical map