1. 事前準備
Carla のルート ディレクトリにあるインポート フォルダーに入ります。
Import フォルダーの下に新しいフォルダーを作成します。ここでは、RoadA という名前を付けました。
新しく作成したフォルダーに入り、json ファイルを作成します。json ファイルの名前はフォルダー名と同じです。
次に、RoadRunner からエクスポートしたマップ フォルダー (マップ) を、
.fbx と .fbx を中心に、新しく作成したフォルダー ディレクトリに置きます。 .xodr ファイル

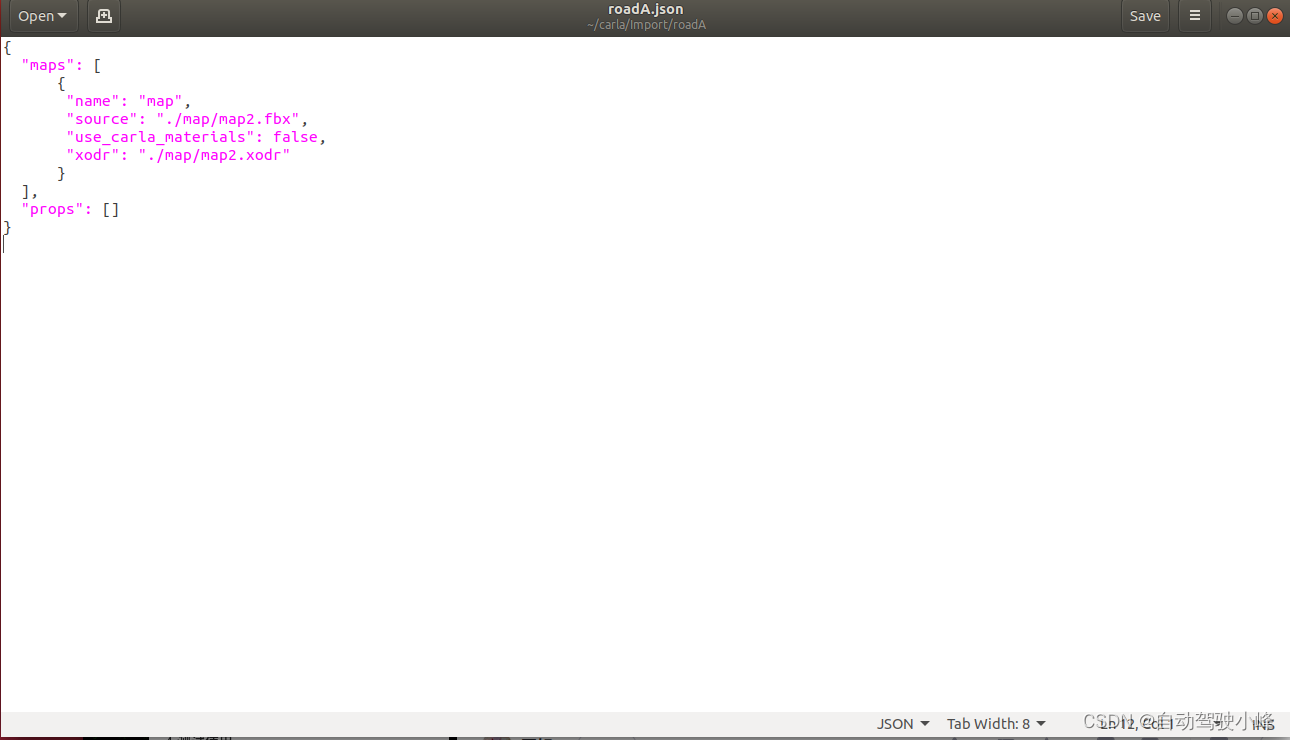
次に、新しく作成したjsonファイルを開きます
gedit ./roadA.json
次のコードを追加して変更します。name
は RoadRunner からエクスポートされたマップ フォルダーの名前です。source
および xodr は、RoadRunner からエクスポートされたマップ フォルダー ディレクトリ内の fbx および xodr ファイルのパスです。パスのルート ディレクトリは新しく作成されたものであることに注意してください。作成されたフォルダー、つまり、json ファイルが配置されているディレクトリ
use_carla_materials は、carla が提供するテクスチャを使用するかどうかを参照します。ここでは false を選択します
{
"maps": [
{
"name": "map",
"source": "./map/map2.fbx",
"use_carla_materials": false,
"xodr": "./map/map2.xodr"
}
],
"props": []
}
ここまでで事前準備は完了です。
2.コンパイル
carlaのルートディレクトリに入り、コンソールで次のコマンドを入力します。
make import
コンパイルが完了するまでに長い時間がかかりますが、コンパイルが
完了すると、carla/Unreal/CarlaUE4/Content ディレクトリに、Import ディレクトリにインポートされたマップ フォルダーと同じ名前のフォルダーが生成されます。ファイル構成は以下の通り
RoadA
│
└── Config
§── RoadA.json
└── Maps
§── マップ
└── Static
├── Road
├── RoadLine
っていつ── Terrian
3. carla のルート ディレクトリに移動し、carla を実行します。
make launch
開いたら、インターフェースに入り
、「ファイル」→「レベルを開く」を選択します。
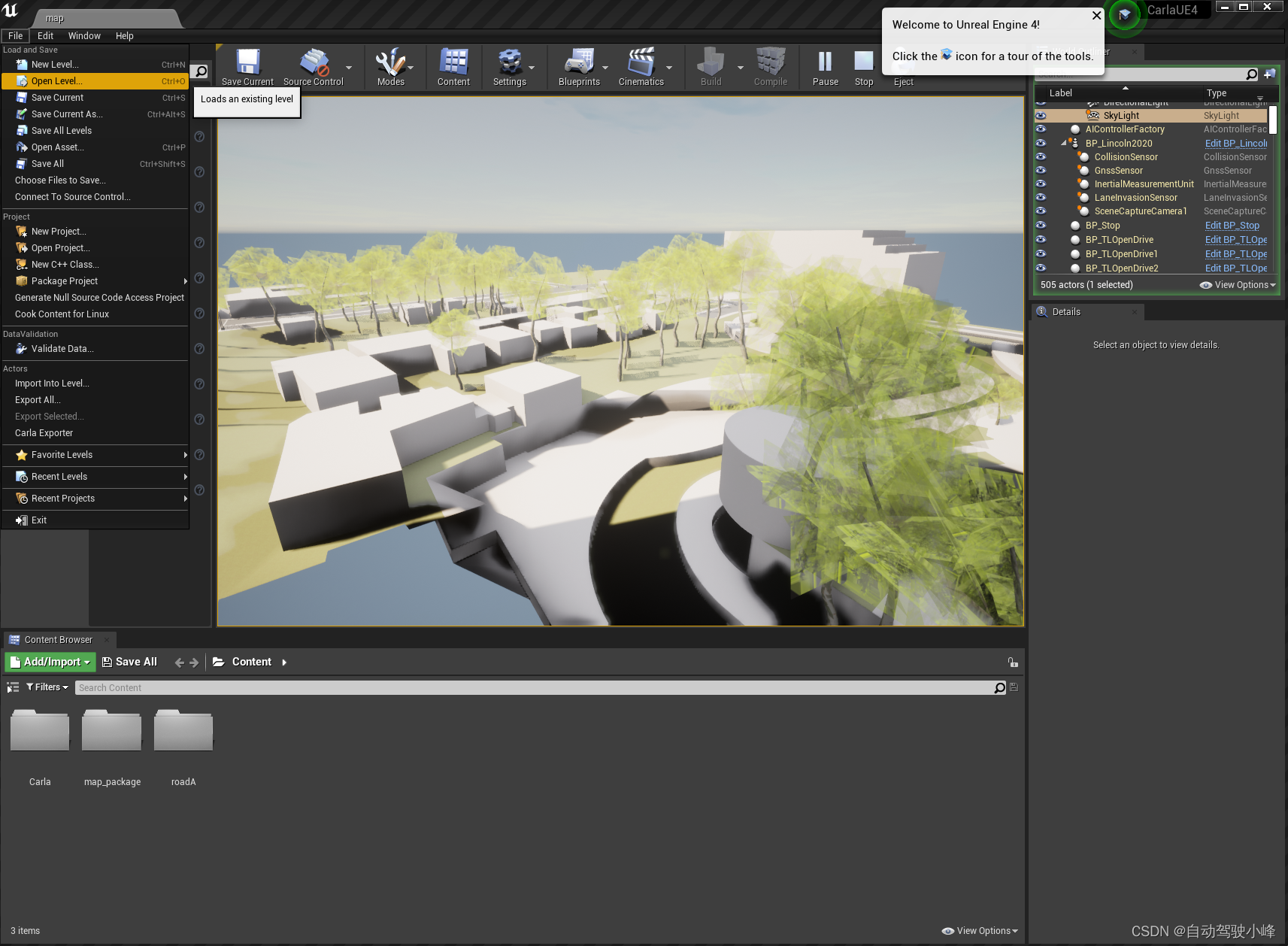
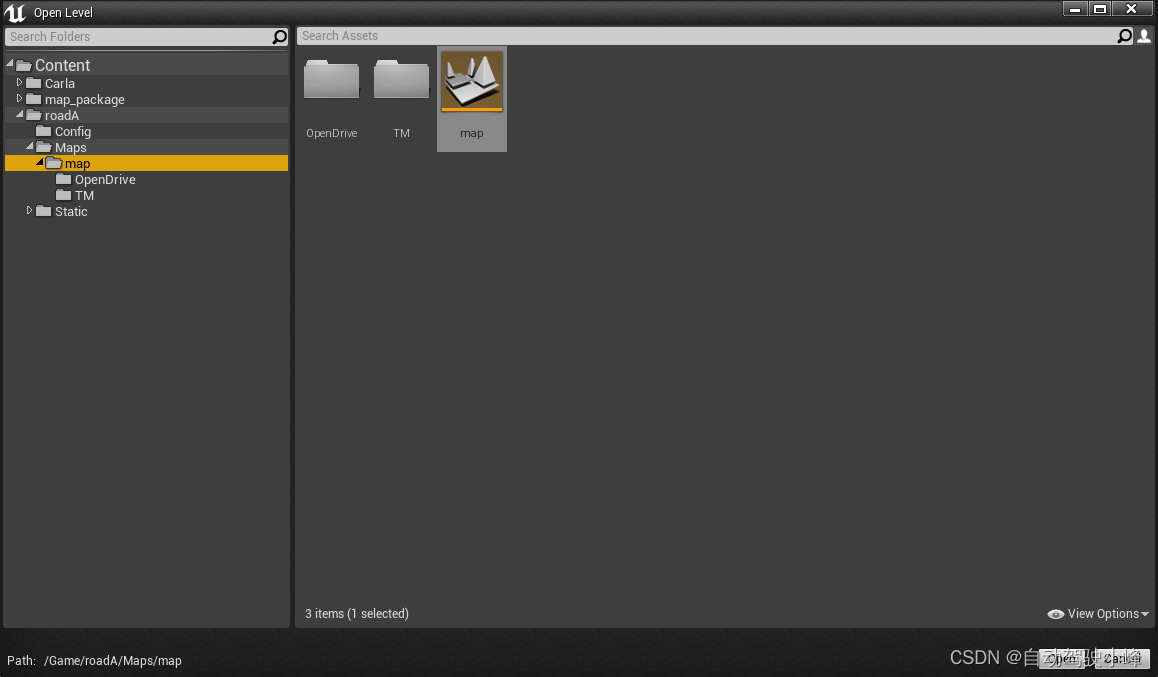
図に示すように、ポップアップ インターフェイスで、make import によって生成されたフォルダーを選択し、Maps ディレクトリの下のファイルをクリックします。
正常に開いた後、RoadRunner に表示される自作マップ
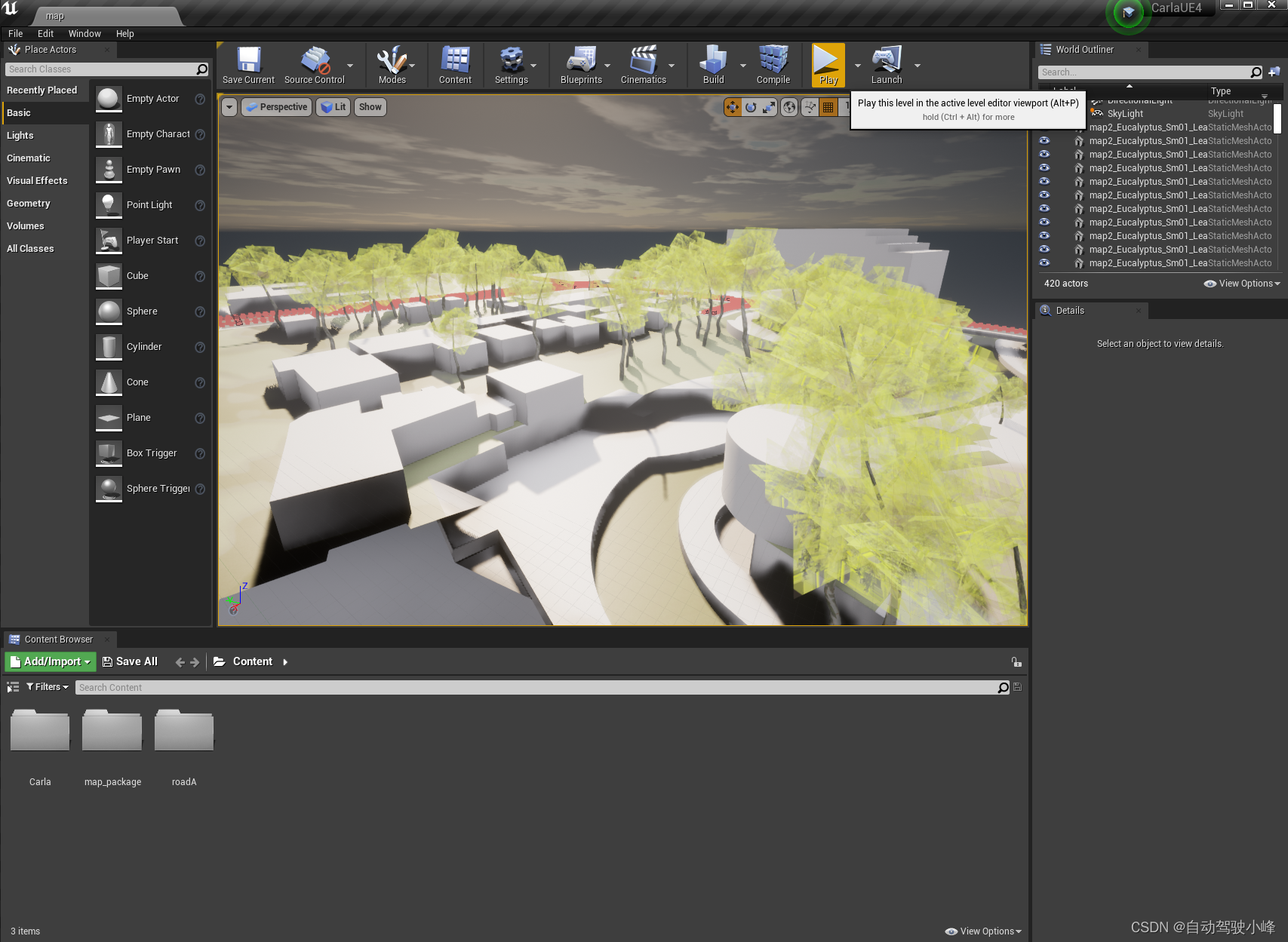
4. テスト使用
右上隅の [再生] をクリックし、操作が成功するまで待ちます (
コマンド ラインにログイン XXXX が表示されます)。その後、Carla/PythonAPI/examples ディレクトリに入り、ターミナルを開いてスクリプトを実行します。
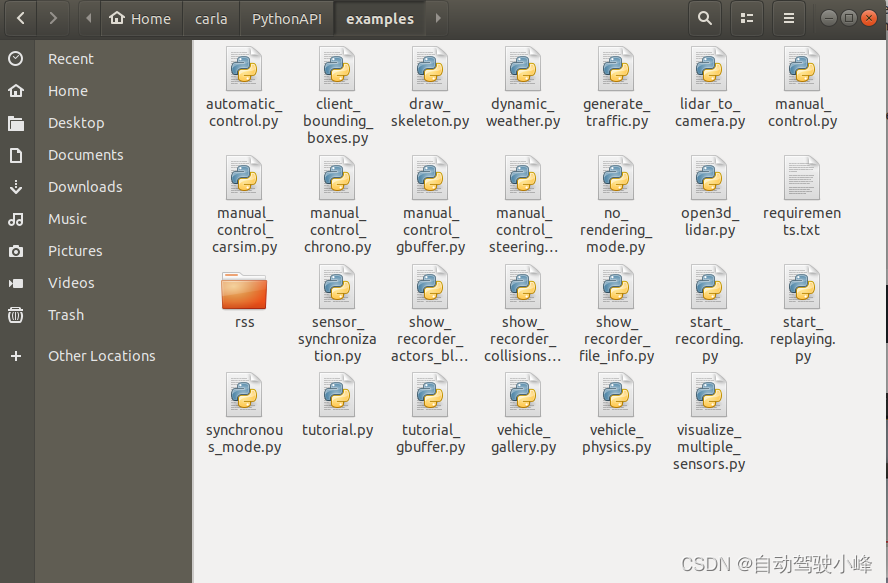
python3 manual_control.py
注: モジュールが見つからない場合は、次のコマンドを入力してインストールします。
pip3 install -r requirements.txt
手動運転の効果は以下のように実現できます。

この時点で、マップのインポートは完了です。
参考リンク:Ubuntu18.04ではCarlaを利用してRoadRunner自作マップをインポートして利用しています