8.2. 系统函数 H(z)
8.2.1. 系统函数 H(z) 定义
F(z)→x=0H(z)→Yf(z)
H(z)=F(z)Yzs(z)
h(k)↔H(z)=k=0∑∞h(k)z−k
H(z)=Z[h(k)]
-
计算方法:
-
H(z)=F(z)Yzs(z)
-
H(z)=Z[h(k)]
- 由系统差分方程求
H(z)
-
应用:
- 求
yzs(k)=Z[Yzs(z)],Yzs(z)=H(z)F(z) ;
- 求
h(z)=Z−1[H(z)] ;
- 求
f(k)=Z−1[F(z)],F(z)=H(z)Yzs(z) ;
- 表示系统特性:频率特性、稳定性等。
-
分解:
f(k)=2πj1∮czF(z)zkdz,−∞<k<∞
z0k→h(k)→z0k⋅H(z0)
f(k)→h(k)→yf(k)
2πj1zF(z)⋅zk→2πj1zF(z)⋅zkH(z)
∮c2πj1zF(z)⋅zkdz→∮c2πj1zF(z)⋅zkH(z)dz
∮c2πj1zF(z)⋅zkdz→∮c2πj1zF(z)⋅H(z)⋅zkdz
Yf(z)=F(z)⋅H(z)
- 回顾 转换成时域
f(k)⋆h(k)↔F(z)⋅H(z)
8.2.2. 系统特性
离散系统的零点与极点
H(z)=A(z)B(z)=zn+an−1zn−1+⋯+a1z+a0bmzm+bm−1zm−1+⋯+b1z+b0=(z−P1)(z−P2)⋯(z−Pn)bm(z−ζ1)(z−ζ2)⋯(z−ζm)=∏i=1n(z−Pi)bm∏j=1m(z−ζj),m≤n
ζi,i=1,2,⋯,m
Pi,i=1,2,⋯,m
- 零/极点的种类:
- 实数、
- 复数 (复数零、极点必共轭 )
- 一阶、二阶及二阶以上极点
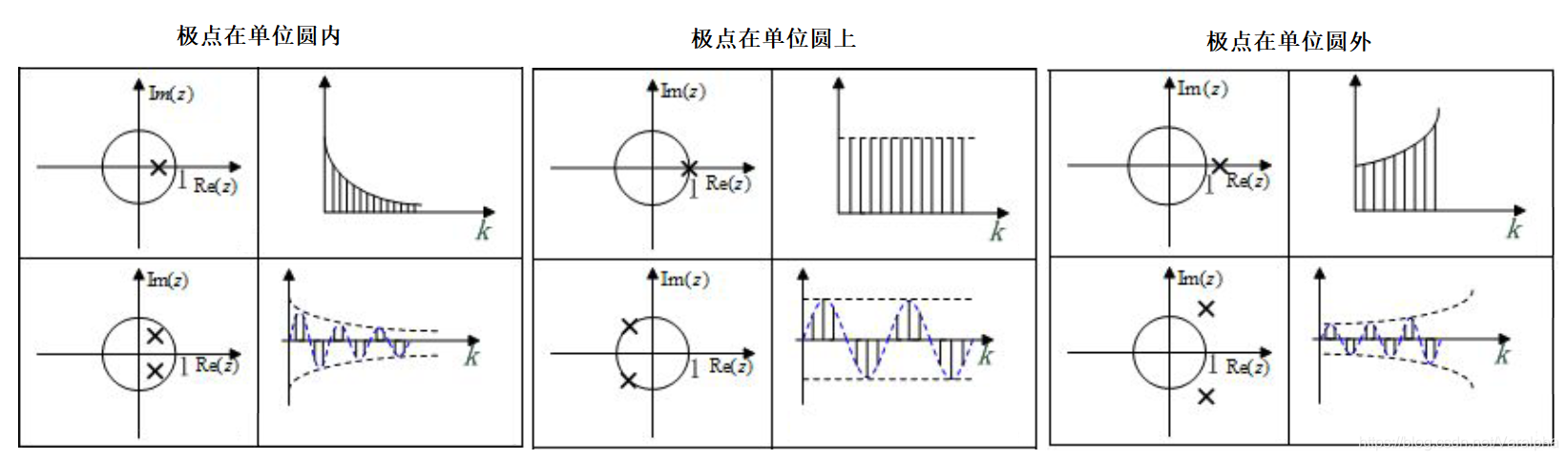
零、极点与h(k)的关系
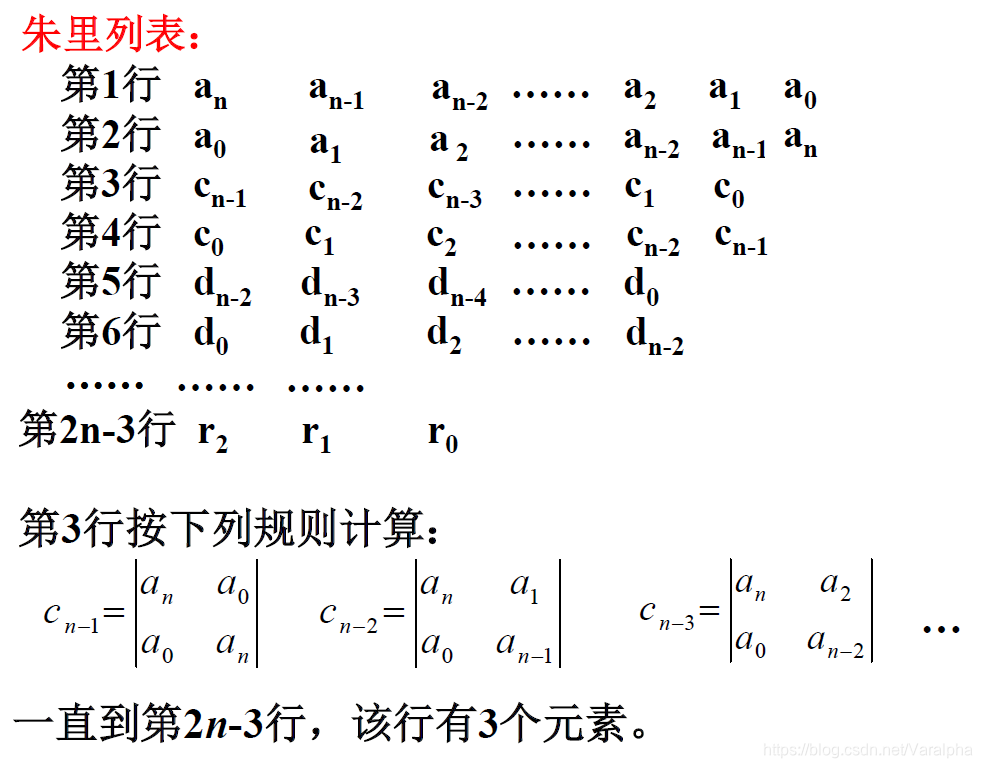
8.2.3. 离散系统稳定性判据(因果系统)
k=−∞∑∞∣h(k)∣<∞
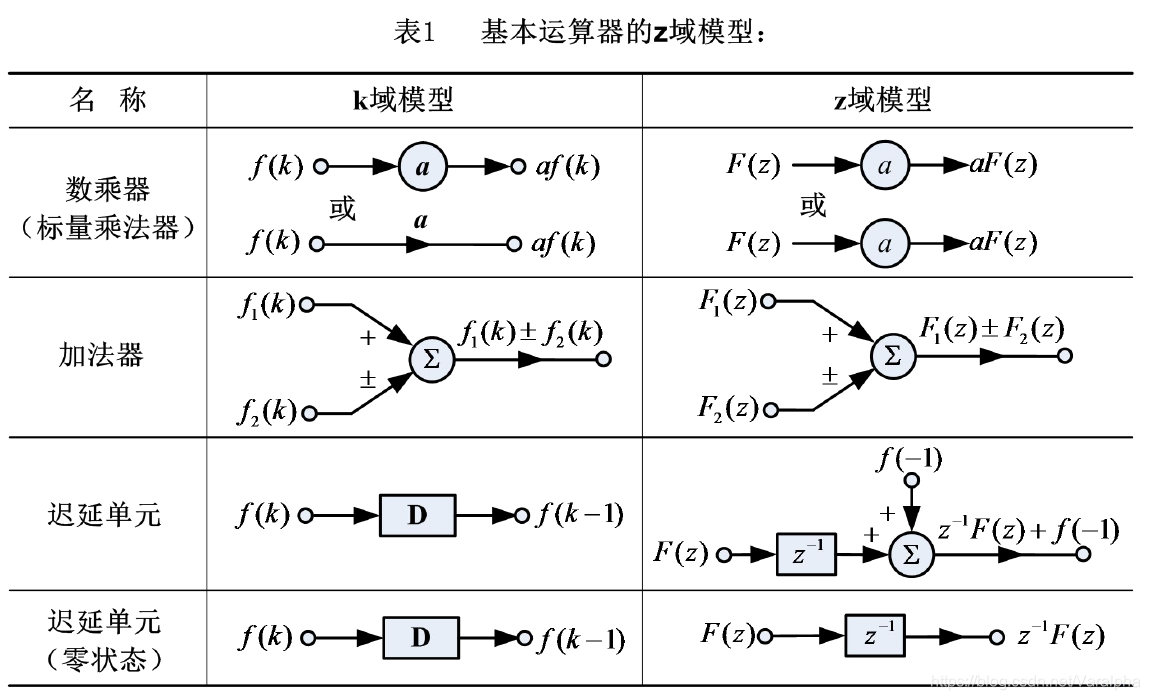
8.2.4. 系统的方框图
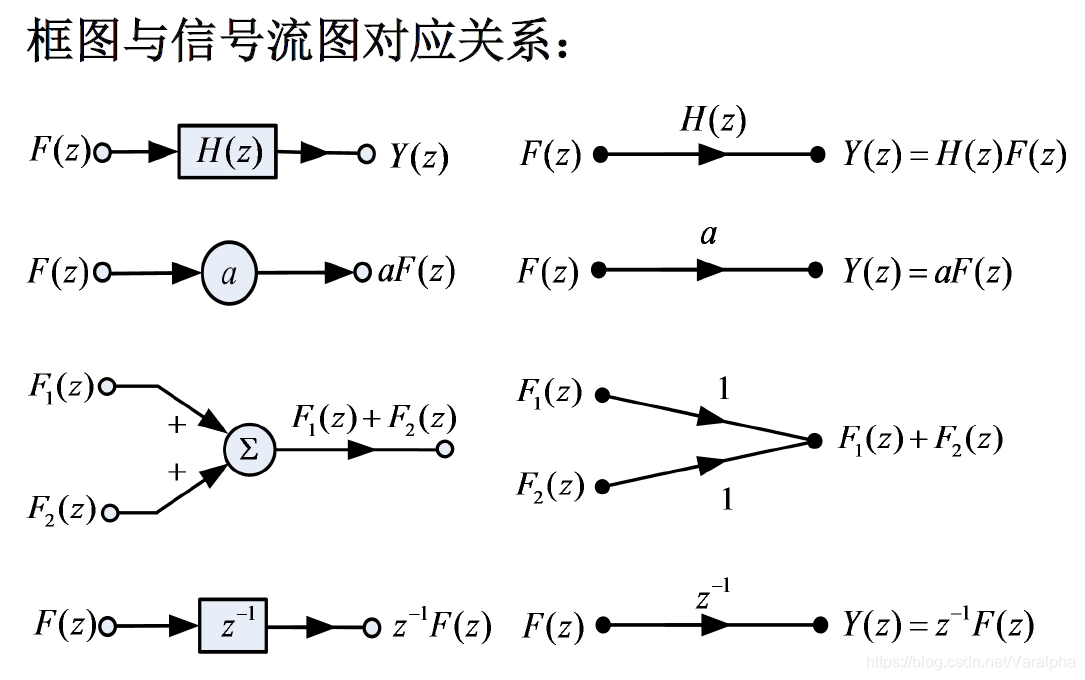
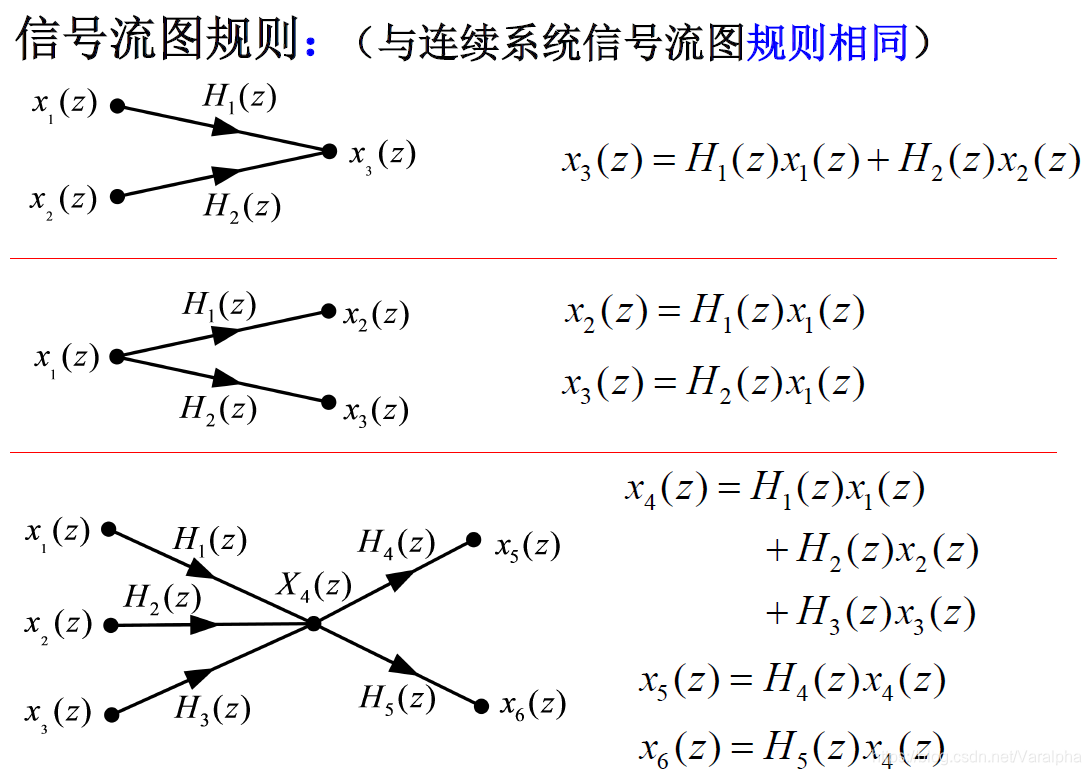
8.2.5. 系统的流图
To TOP 至目录