8. 离散系统 z 域分析
连续时域f(t)⋆h(t)变换域{F(jω)⋅H(jω)F(s)⋅H(s)∣∣∣离散∣∣∣f(k)⋆h(k)∣∣∣F(z)⋅H(z)
8.1. z 变换
- 拉氏变换把连续系统微分方程转换为代数方程,同样地,也可以通过一种称为z变换的数学工具,把差分方程转换为代数方程。
8.1.1. z 变换 定义
-
z变换 导出
-
对连续信号进行均匀冲激取样后,就得到离散信号。
-
取样信号:
fs(t)=f(t)δT(t)=k=−∞∑∞f(kT)δ(t−kT)
-
两边取双边拉普拉斯变换,时移性质,得:
FSb(s)=k=−∞∑∞f(kT)e−kTs
-
令
z=esT, 上式将成为复变量
z 的函数, 用
F(z) 表示;
f(kT)→f(k), 得
Fb(z)=k=−∞∑∞f(k)z−k称为序列f(k)的双边z变换
F(z)=k=0∑∞f(k)z−k称为序列f(k)的单边z变换
-
若
f(k) 为因果序列,则单边、双边
z 变换相等,否则不同。今后在不致混淆的情况下,统称它们为
z 变换。
-
与拉普拉斯变换相同,双边变换会涉及到多值的问题(双边z 变换必须标明收敛域),所以一般使用单边变换。
-
表示:
F(z)=Z[f(k)]
f(k)=Z−1[F(z)]
f(k)⟷F(z)
8.1.2. z 变换 收敛域
- 当幂级数收敛时,
z 变换才存在,即满足绝对可和条件:
k=−∞∑∞∣∣f(k)z−k∣∣<∞
-
它是序列
f(k) 的
z 变换存在的充要条件。
-
定义:
- 对于序列
f(k), 满足
k=−∞∑∞∣∣f(k)z−k∣∣<∞
- 所有
z 值组成的集合称为其
z 变换
F(z) 的收敛域。
-
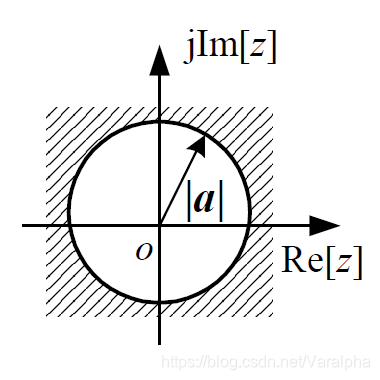
例: 因果序号
f(k)=akε(k) 的
z 变换 (
a 为常数)。
F(z)=k=1∑∞akz−k=N→∞limk=1∑N(az−)k=N→∞lim1−az−11−(az−1)N+1
- 仅当
∣az−1∣<1, 即
∣z∣>∣a∣ 时, 其 z 变换存在。
-
F(z)=z−az
- 收敛域为
∣z∣>∣a∣ (某个圆之外)
-
注意:
- 双边z 变换必须标明收敛域
- 对单边z变换,其收敛域是某个圆外的区域,可省略。
-
结论:
双边Fb(z)+收敛域⟵单边F(z)⟵⟶f(k)⟶f(k)
| 序列特性 |
收敛域特性 |
图 |
例
f(k)= |
| 有限长序列 |
常为整个平面 |
 |
δ(k),ε(k+1)−ε(k−2) |
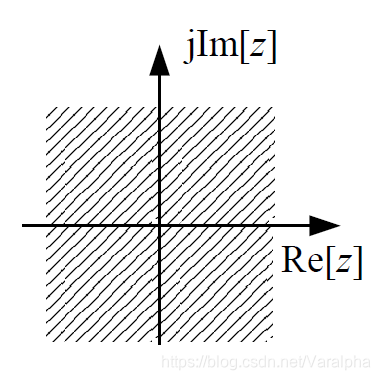
| 因果序列 |
某个圆外区域 |
 |
akε(k) |
| 反因果序列 |
某个圆内区域 |
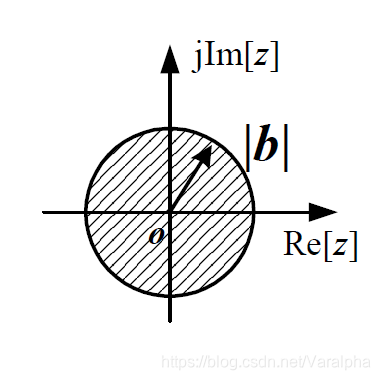 |
bkε(−k−1) |
| 双边序列 |
(若存在)环状区域 |
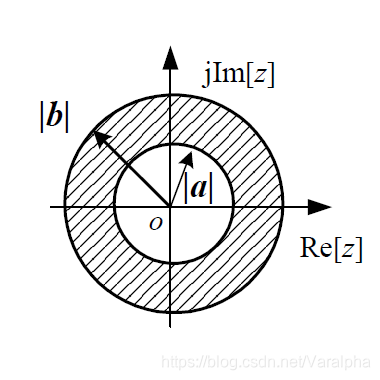 |
{bk,ak,k<0k≥0,∣a∣<∣b∣ |
| 双边序列 |
(不存在)环状区域 |
 |
{ak,bk,k<0k≥0,∣a∣<∣b∣ |
8.1.3. 常用序列的z变换
δ(k)⟵δ(k−m)⟵ε(k)⟵−ε(−k−1)⟵akε(k)⟵−akε(−k−1)⟵⟶1,整个z平面⟶z−m,∣z∣>0⟶z−1z,∣z∣>1⟶z−1z,∣z∣<1⟶z−az,∣z∣>∣a∣⟶z−az,∣z∣<∣a∣
8.1.4. z变换 性质
- 说明:z变换性质,若无特殊说明,对单边和双边z变换均适用。
线性性质
-
若
f1(k)⟵f2(k)⟵a1f1(k)+a2f2(k)⟵⟶F1(z),⟶F2(z),⟶a1F1(z)+a2F2(z),有常数a1,a2,α1<∣z∣<β1有常数a1,a2,α2<∣z∣<β2max(α1,α2)<∣z∣<max(β1,β2)
-
其收敛域至少是
F1(z) 与
F2(z) 收敛域的相交部分
移序性质
-
双边z变换的移位:
- 若
f(k)⟵f(k±m)⟵⟶F(z),⟶z±mF(z),整数m>0,α<∣z∣<βα<∣z∣<β
-
单边z变换的移位:
- 若
f(k)⟵f(k−m)⟵f(k+m)⟵⟶F(z),⟶z−mF(z)+k=0∑m−1f(k−m)z−k,⟶z+mF(z)−k=0∑m−1f(k)zm−k,整数m>0,∣z∣>α∣z∣>α∣z∣>α
- 因果序列z变换的移位:
- 若
f(k)⟵f(k−m)ε(k−m)⟵f(k−m)⟵⟶F(z),⟶z−mF(z),⟶z−mF(z),整数m>0,∣z∣>α∣z∣>α∣z∣>α
反折性质
- k域反转(仅适用双边z变换):
- 若
f(k)⟵f(−k)⟵⟶F(z),⟶F(z−1),α<∣z∣<ββ1<∣z∣<α1
尺度变换特性
-
序列乘
αk,α=0
-
若
f(k)⟵akf(k)⟵⟶F(z),⟶F(az),有常数a,α<∣z∣<β∣a∣α<∣z∣<∣a∣β
微分特性
-
序列乘
k
-
若
f(k)⟵kf(k)⟵k2f(k)⟵kmf(k)⟵⟶F(z),⟶(−z)dzdF(z),⟶(−z)dzd[(−z)dzdF(z)],⟶m次(−z)dzd[⋯(−z)dzd[(−z)dzdF(z)]⋯],α<∣z∣<βα<∣z∣<βα<∣z∣<βα<∣z∣<β
时域卷积
- 若:
f1(k)⟵f2(k)⟵f1(k)⋆f2(k)⟵⟶F1(z),⟶F2(z),⟶F1(z)⋅F2(z),α1<∣z∣<β1α2<∣z∣<β2max(α1,α2)<∣z∣<min(β1,β2)
- Remark:
- 收敛域一般为
F1(z) 与
F2(z) 收敛域的相交部分;
- 对单边z变换,要求:
f1(k)、
f2(k) 为因果序列。
部分和
- 若
f(k)⟵i=−∞∑kf(i)⟵f(k)⋆ε(k)⟵⟶F(z),⟶z−1zF(z),⟶z−1zF(z),α<∣z∣<βmax(α,1)<∣z∣<βmax(α,1)<∣z∣<β
8.1.5. 初值 终值 定理
-
初值定理适用于右边序列,即适用于
k<M (
M为整数)时
f(k)=0 的序列。由象函数直接求序列的初值
f(M),f(M+1),⋯ 而不必求得原序列。
-
初值定理:
- 如果序列在
k<M 时,
f(k)=0,
f(k)↔F(z) ,
α<∣z∣<∞
- 则序列的初值:
f(M)=z→∞limzmF(z)
- 对因果序列
f(k):
f(0)=z→∞limF(z)
-
终值定理:
- 如果序列存在终值,即:
f(∞)=k→∞limF(k)
- 则序列的终值:
f(∞)=z→1limzz−1F(z)=z→1lim(z−1)F(z)
- 注意:收敛域要求含单位圆。
8.1.6. 逆z变换
f(k)=2πj1∮cF(z)zk−1dz,−∞<k<∞
-
逆变换的计算方法:
- 反演积分法(留数法);
- 幂级数展开法;有局限性
- 部分分式展开法;
- 用 z 变换性质求逆 z 变换。组合使用
-
一般而言,双边序列
f(k) 可分解为因果序列
f1(k) 和反因果序列
f2(k) 两部分,即
f(k)=f2(k)+f1(k)=f(k)ε(−k−1)+f(k)ε(k)
-
相应地,其z变换也分为两部分
F(z)=F2(z)+F1(z),α<∣z∣<β
- 其中:
F1(z)=Z[f(k)ε(k)]=k=0∑∞f(k)z−k,∣z∣>α
F2(z)=Z[f(k)ε(−k−1)]=k=−∞∑−1f(k)z−k,∣z∣<β
-
已知象函数
F(z) 时,根据给定的收敛域不难由
F(z) 分解为
F1(z) 和
F2(z),分别求对应的原序列
f1(k) 和
f2(k) ,根据线性性质,将两者相加原序列
f(k)。
-
幂级数展开法
- 根据z变换的定义,因果序列和反因果序列的象函数分别是
z−1 和
z的幂级数; 其系数就是相应的序列值。
- 降幂排列
F1(z)=k=0∑∞f1(k)z−k=f(0)+f(1)z−1+f(2)z−2+⋯
f(k)={f(0),f(1),f(2),⋯}
- 升幂排列
F2(z)=k=−∞∑−1f2(k)z−k=f(−1)z1+f(−2)z2+⋯
f(k)={⋯,f(−3),f(−2),f(−1)}
- 原序列通常难以写成闭合形式
-
部分分式展开法
F(z)=A(z)B(z)=zn+an−1zn−1+⋯+a1z+a0bmzm+bm−1zm−1+⋯+b1z+b0,m≤n
-
F(z) 为单极点 ,且不为零
zF(z)=zK0+z−z1K1+⋯+z−ziKi+⋯+z−znKn
Ki=(z−zi)zF(z)∣∣z=zi
F(z)=K0+i=1∑nz−ziKiz
* 根据收敛域, 将上式划分为
F1(z)(∣z∣>α) 和
F2(z)(∣z∣<β) 两部分,由如下已知变换对,来求原函数。
δ(k)⟵akε(k)⟵−akε(−k−1)⟵⟶1,整个z平面⟶z−az,∣z∣>∣a∣⟶z−az,∣z∣<∣a∣
-
特例
F(z) 包含共轭复根 时 (
z1,2=c±jd=αe±jβ):
zF(z)K1F(z)=z−c−jdK1+z−c+jdK1∗=∣K1∣ejθ=z−αejβ∣K1∣ejθz+z−αe−jβ∣K1∣e−jθz
若∣z∣>α,f(k)=2∣k1∣αkcos(βk+θ)ε(k)
若∣z∣<α,f(k)=−2∣k1∣αkcos(βk+θ)ε(−k−1)
-
F(z) 有重极点 (重根)
- 若
A(z)=0 在
z=p1 处有
r 重根,
F(z)=Fa(z)+Fb(z)=(z−a)rK11z+(z−a)r−1K12z+⋯+(z−a)K1rz+Fb(z)
K1i=(i−1)!1dzi−1di−1[(z−a)rzF(z)]∣∣∣z=a
-
F(z) 展开式中含
(z−a)rz 项 (
r>1), 则逆变换为:
- 若
∣z∣>α, 对应原序列为因果序列:
(r−1)!k(k−1)⋯(k−r+2)ak−r+1ε(k)
-
推导记忆:
Z[akε(k)]Z[kak−1ε(k)]Z[k(k−1)ak−2ε(k)]Z[21k(k−1)ak−2ε(k)]=z−az=(z−a)2z=(z−a)32z=(z−a)3z
8.1.7 z变换与拉普拉斯变换的关系
Z平面与S平面的映射关系
z=esT
s=T1lnz
-
T 是序列的时间间隔
-
ωs=T2π 重复频率
-
为了说明s与z的映射关系
-
s表示成直角坐标形式
s=σ+jω
-
z 表示成极坐标形式
z=rejθ
z=rejθ=e(σ+jω)T=eσTejωT
-
于是得到
r=eσT=eωs2πσ
θ=ωT=2πωsω
-
上式表明s平面与z平面有如下的映射关系:
- s平面上的虚轴 (
σ=0,s=jω) 映射到z平面是单位圆
r=1 ,
其右半平面
σ>0 映射到 z 平面的单位圆外
r>1,
而左半平面
σ<0 映射到 z 平面的单位圆内
r<1。
- s平面的实轴(
s=σ,ω=0) 映射到z平面的正实轴;
原点(
s=0)映射到z平面的正实轴上一点(
r=1,θ=0) 。
- 由于
ejθ 是以
ωs 为周期的周期函数,
因此在 s 平面上沿虚轴移动对应于 z 平面上沿单位圆周期旋转,每平移
ωs ,则沿单位圆转一圈。
所以
s∼z 映射并不是单值的。
s变换与z变换的转换公式
-
z变换的定义式是通过理想取样信号的拉普拉斯变换引出的,由此,离散序列的z变换和理想取样信号的拉普拉斯变换之间具有如下关系:
F(z)∣∣z=esT=Fs(s)
-
表明: z变换式中令
z=esT, 则变换式就成为相应的理想取样信号的拉普拉斯变换。
- 如果进一步地,令拉普拉斯变换中的变量
s=jω,则
F(z)∣∣z=ejωT=Fs(jω)
- 上式变为与序列相对应的理想取样信号的傅里叶变换。
-
讨论:若连续信号
f(t) 由N项指数信号相加而成(单极点):
f(t)=f1(t)+f2(t)+⋯+fN(t)=i=1∑Nfi(t)=i=1∑NAiepitε(t)
- 容易求得,其拉普拉斯变换为:
F(s)=i=1∑Ns−piAi
- 对应的采样离散序列
f(k) 由 N 项指数序列相加而成
f(k)=f1(k)+f2(k)+⋯+fN(k)=i=1∑Nfi(k)=i=1∑NAiepikTε(k)
- 它的z变换为
F(z)=i=1∑Nz−epiTAiz
F(s)=i=1∑Nz−piAi
-
结论:如果
F(s) 有N个单极点
pi,则相应的z变换即为
F(z)。
8.1.8. 差分方程的z变换解
-
单边 z 变换将系统的初始条件自然地包含于其代数方程中,故可求系统的零输入、零状态响应和全响应。
i=0∑nab−iy(k−i)=j=0∑mbm−jf(k−j)
-
设
f(k) 在
k=0 时接入,系统初始状态为
y(−1),y(−2),⋯y(−n) 。
-
取单边 z 变换得:
i=0∑nan−i[z−iY(z)+k=0∑i−1y(k−i)z−k]=j=0∑mbm−j[z−jF(z)]
[i=0∑nan−iz−iY(z)]+i=0∑nan−i[k=0∑i−1y(k−i)z−k]=[j=0∑mbm−jz−j]F(z)
Y(z)=A(z)M(z)+A(z)B(z)F(z)=Yzi(z)+Yzs(z)
-
系统函数:
H(z)=F(z)Yzs(z)=A(z)B(z)
h(k)⟷H(z)
-
说明:前向差分方程的解法:
-
方法1:
用左移性质:
f(k+m)↔zmF(z)−k=0∑m−1f(k)zm−k
初始条件:
y(0),y(1),⋯
-
方法2:
转变为后向差分方程,用右移性质求解
初始条件:
y(−1),y(−2),⋯
- 若初始条件不适用,则用递推法由相应的差分方程递推得到需要的初始条件。
To TOP 至目录
