像素是相机的最小单位,但是在机器视觉测量的过程当中往往会应用到亚像素(小于一个像素)
灰度值变化可以视为点处理 ,因为灰度变换相当于对单独的像素点分别进行变换。
一、线性灰度变换
灰度值线性缩放比例f(g)=ag+b,其中参数部分可以解释为
|a|>1:对比度增加,|a|<0:对比度减小,a<0:灰度值反转。 这一部分参数影响的主要是对原来的灰度的缩放比例
b>0:亮度增加,b<0:亮度减小。这一部分参数主要是对灰度进行整体的平移。
注意:一般在变换的过程中按照四舍五入的方式去处理,但是要注意灰度值是有范围限制的,当线性变换后的灰度数值超越上下界限时,应设置为界限数值。
归一化的变化,假定当前ROI区域中 ,gmin 和gmax 分别代表当前最大、最小灰度值。归一化中a=(2b-1)/(gmax -gmim),且b=-agmim其中 (2b-1)表示所分布的灰度阶。这样处理能够使得变换后的灰度能够尽可能地覆盖Gb的最大取值范围。
二、灰度直方图
灰度直方图的主要作用是统计某一灰度在图片中出现的概率。

进一步,可以求图像的累计直方图。

通过灰度直方图能够观察图像中灰度的分布情况
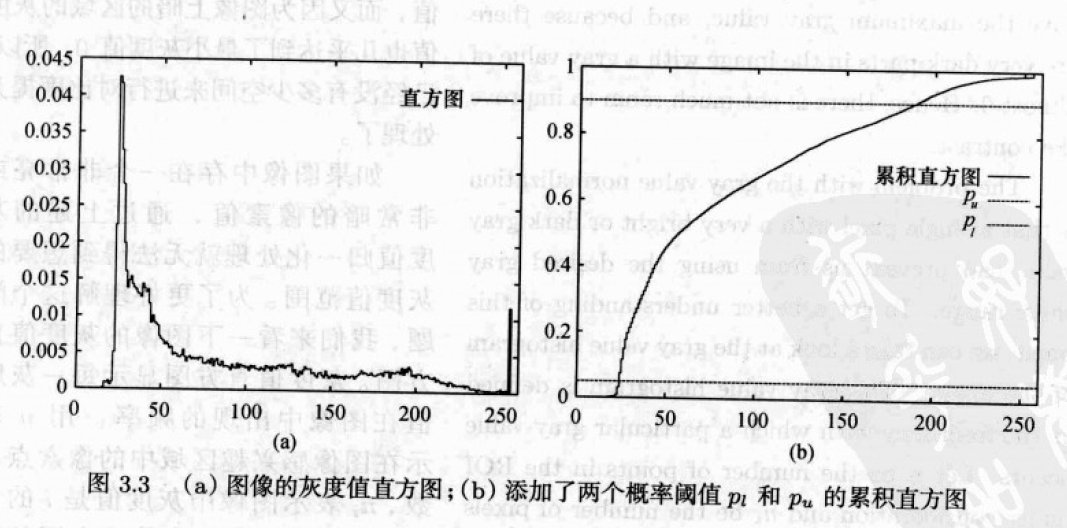
针对图中的灰度直方图,设置上下界限以剥离过亮和过暗部分的像素(概率阈值),从而显著提升图像的对比度,称之为鲁棒的线性阈值变换。
三、辐射标定
求取逆响应函数的过程就被成为辐射标定。原因是传感器所收集的能量与图像之间的灰度有可能并非线性响应。对非线性图像进行逆响应,从而结果图像就变为线性的。
1、通过参照物进行标定(传统方法)如标定板
通过测量量对函数进行拟合 (包含增益与偏移的伽马函数)
(包含增益与偏移的伽马函数)
存在两个问题:1、标定板未标准化 2、需要整个视野中存在均匀光源
2、采取不同曝光方式(曝光时间(首选)与光圈)实现无图表标定
无标定板标定方法。
注意点;1、对于过曝的点应该删除(因为已经到达上限,即能量增加灰度并不会继续增加,会影响标定的结果)
2、针对多次出现的灰度值对可以简化计算过程中的A矩阵(降低其维度)