博客转载:https://blog.csdn.net/hcx25909/article/details/9255001
在机器人的控制中,坐标系统是非常重要的,在ROS使用tf软件库进行坐标转换。
一、tf简介
我们通过一个小小的实例来介绍tf的作用。
1、安装turtle包
sudo apt-get install ros-indigo-turtlebot
2、运行demo
$ roslaunch turtle_tf turtle_tf_demo.launch
然后就会看到两只小乌龟
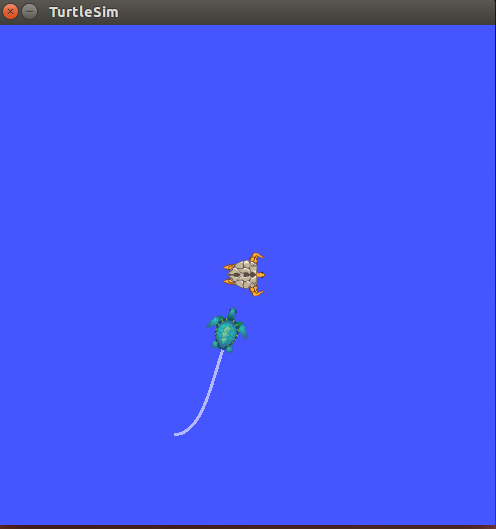
该例程中带有turtlesim仿真,可以在终端激活的情况下进行键盘控制。
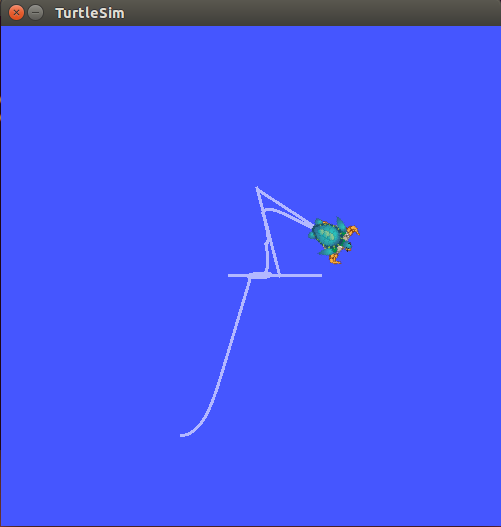
方向键控制黄色乌龟的运动,第二只绿色乌龟会跟随你移动的乌龟进行移动
3、demo分析
这个例程使用tf建立了三个参考系:a world frame, a turtle1 frame, and a turtle2 frame。然后使用tf broadcaster发布乌龟的参考系,并且使用tf listener计算乌龟参考系之间的差异,使得第二只乌龟跟随第一只乌龟。