建图
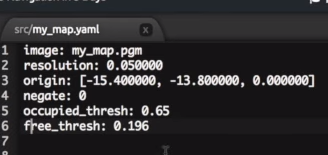
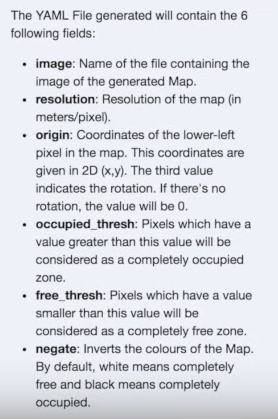 lower_left:左下角
lower_left:左下角
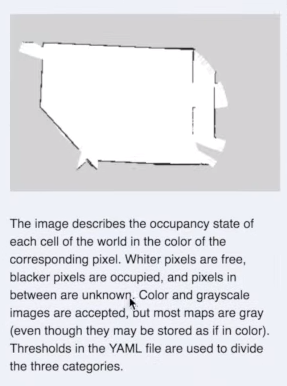
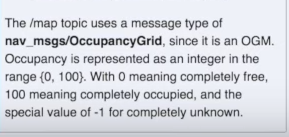
occupancy n.占用,使用
latch v.锁住 n.门闩

https://www.youtube.com/watch?v=mYwIu4OVMR8&list=PLiiw0aSVHcAkF26qR6Q7x6RlLAL6-vuF3&index=2
20:52



drone n.无人机




odom为什么会随着车移动逐渐漂移::https://answers.ros.org/question/10302/the-tf-between-map-and-odom-is-not-static/#15185
odom 是一个全局坐标,并不是指的 编码器在车上的位置



resolution:分辨率


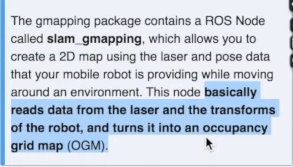
gmapping.launch
<launch>
<arg name="scan_topic" default="kobuki/laser/scan" />
<arg name="base_frame" default="base_footprint"/>
<arg name="odom_frame" default="odom"/>
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<param name="base_frame" value="$(arg base_frame)"/>
<param name="odom_frame" value="$(arg odom_frame)"/>
<param name="map_update_interval" value="5.0"/>
<param name="maxUrange" value="6.0"/>
<param name="maxRange" value="8.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="minimumScore" value="200"/>
<param name="srr" value="0.01"/>
<param name="srt" value="0.02"/>
<param name="str" value="0.01"/>
<param name="stt" value="0.02"/>
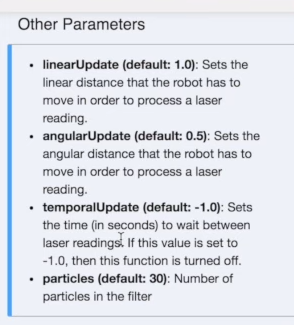
<param name="linearUpdate" value="0.5"/>
<param name="angularUpdate" value="0.436"/>
<param name="temporalUpdate" value="-1.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="80"/>
<!--
<param name="xmin" value="-50.0"/>
<param name="ymin" value="-50.0"/>
<param name="xmax" value="50.0"/>
<param name="ymax" value="50.0"/>
make the starting size small for the benefit of the Android client's memory...
-->
<param name="xmin" value="-1.0"/>
<param name="ymin" value="-1.0"/>
<param name="xmax" value="1.0"/>
<param name="ymax" value="1.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
<remap from="scan" to="$(arg scan_topic)"/>
</node>
</launch>


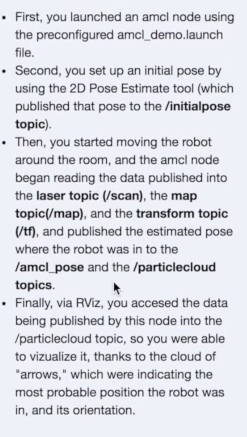
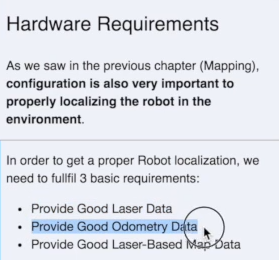
定位:
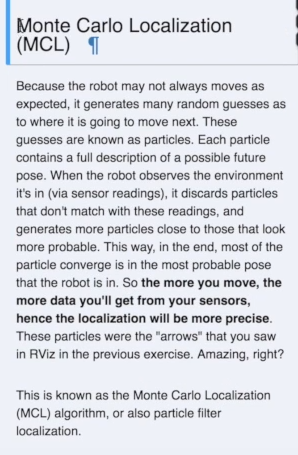
particle: acml导航时,rviz里面的一团箭头




acml.launch
<?xml version="1.0"?>
<!--
Software License Agreement (BSD)
\file amcl.launch
\authors Paul Bovbel <[email protected]>, Prasenjit Mukherjee <[email protected]>
\copyright Copyright (c) 2015, Clearpath Robotics, Inc., All rights reserved.
Redistribution and use in source and binary forms, with or without modification, are permitted provided that
the following conditions are met:
* Redistributions of source code must retain the above copyright notice, this list of conditions and the
following disclaimer.
* Redistributions in binary form must reproduce the above copyright notice, this list of conditions and the
following disclaimer in the documentation and/or other materials provided with the distribution.
* Neither the name of Clearpath Robotics nor the names of its contributors may be used to endorse or promote
products derived from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND ANY EXPRESS OR IMPLIED WAR-
RANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, IN-
DIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT
OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND
ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
-->
<launch>
<arg name="use_map_topic" default="true"/>
<arg name="scan_topic" default="scan" />
<node pkg="amcl" type="amcl" name="amcl">
<param name="use_map_topic" value="$(arg use_map_topic)"/>
<!-- Publish scans from best pose at a max of 10 Hz -->
<param name="odom_model_type" value="diff"/>
<param name="odom_alpha5" value="0.1"/>
<param name="gui_publish_rate" value="10.0"/>
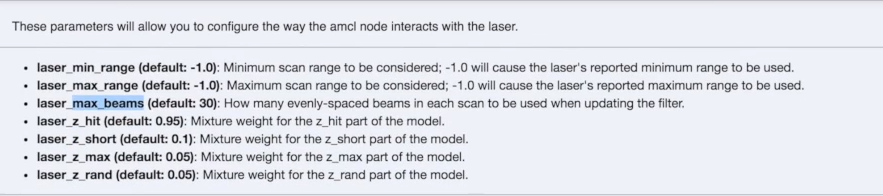
<param name="laser_max_beams" value="60"/>
<param name="laser_max_range" value="12.0"/>
<param name="min_particles" value="500"/>
<param name="max_particles" value="2000"/>
<param name="kld_err" value="0.05"/>
<param name="kld_z" value="0.99"/>
<param name="odom_alpha1" value="0.2"/>
<param name="odom_alpha2" value="0.2"/>
<!-- translation std dev, m -->
<param name="odom_alpha3" value="0.2"/>
<param name="odom_alpha4" value="0.2"/>
<param name="laser_z_hit" value="0.5"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_model_type" value="likelihood_field"/>
<!-- <param name="laser_model_type" value="beam"/> -->
<param name="laser_likelihood_max_dist" value="2.0"/>
<param name="update_min_d" value="0.25"/>
<param name="update_min_a" value="0.2"/>
<param name="odom_frame_id" value="odom"/>
<param name="resample_interval" value="1"/>
<!-- Increase tolerance because the computer can get quite busy -->
<param name="transform_tolerance" value="1.0"/>
<param name="recovery_alpha_slow" value="0.0"/>
<param name="recovery_alpha_fast" value="0.0"/>
<remap from="scan" to="$(arg scan_topic)"/>
</node>
</launch>
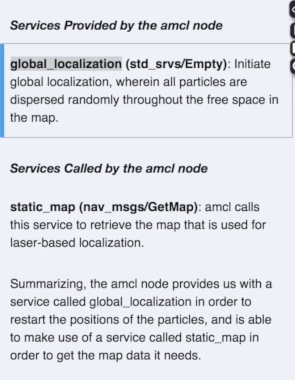
如果call ,rviz中的箭头会变得一片散乱
,rviz中的箭头会变得一片散乱


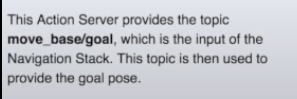


move_base.launch
<!--
ROS navigation stack with velocity smoother and safety (reactive) controller
-->
<launch>
<include file="$(find turtlebot_navigation)/launch/includes/velocity_smoother.launch.xml"/>
<include file="$(find turtlebot_navigation)/launch/includes/safety_controller.launch.xml"/>
<arg name="odom_frame_id" default="odom"/>
<arg name="base_frame_id" default="base_footprint"/>
<arg name="global_frame_id" default="map"/>
<arg name="odom_topic" default="odom" />
<arg name="laser_topic" default="/kobuki/laser/scan" />
<arg name="custom_param_file" default="$(find turtlebot_navigation)/param/dummy.yaml"/>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find turtlebot_navigation)/param/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find turtlebot_navigation)/param/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find turtlebot_navigation)/param/local_costmap_params.yaml" command="load" />
<rosparam file="$(find turtlebot_navigation)/param/global_costmap_params.yaml" command="load" />
<rosparam file="$(find turtlebot_navigation)/param/dwa_local_planner_params.yaml" command="load" />
<rosparam file="$(find turtlebot_navigation)/param/move_base_params.yaml" command="load" />
<rosparam file="$(find turtlebot_navigation)/param/global_planner_params.yaml" command="load" />
<rosparam file="$(find turtlebot_navigation)/param/navfn_global_planner_params.yaml" command="load" />
<!-- external params file that could be loaded into the move_base namespace -->
<rosparam file="$(arg custom_param_file)" command="load" />
<!-- reset frame_id parameters using user input data -->
<param name="global_costmap/global_frame" value="$(arg global_frame_id)"/>
<param name="global_costmap/robot_base_frame" value="$(arg base_frame_id)"/>
<param name="local_costmap/global_frame" value="$(arg odom_frame_id)"/>
<param name="local_costmap/robot_base_frame" value="$(arg base_frame_id)"/>
<param name="DWAPlannerROS/global_frame_id" value="$(arg odom_frame_id)"/>
<remap from="cmd_vel" to="/cmd_vel"/>
<remap from="odom" to="$(arg odom_topic)"/>
<remap from="scan" to="$(arg laser_topic)"/>
</node>
</launch>
move_base_params.yaml
# Move base node parameters. For full documentation of the parameters in this file, please see
#
# http://www.ros.org/wiki/move_base
#
shutdown_costmaps: false
controller_frequency: 5.0
controller_patience: 3.0
planner_frequency: 1.0
planner_patience: 5.0
oscillation_timeout: 10.0
oscillation_distance: 0.2
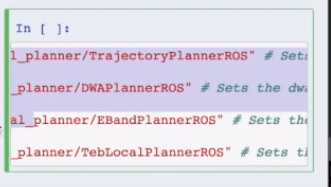
# local planner - default is trajectory rollout
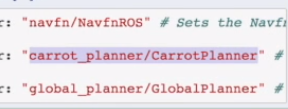
base_local_planner: "dwa_local_planner/DWAPlannerROS"
#alternatives: global_planner/GlobalPlanner, carrot_planner/CarrotPlanner
base_global_planner: "navfn/NavfnROS"
#We plan to integrate recovery behaviors for turtlebot but currently those belong to gopher and still have to be adapted.
## recovery behaviors; we avoid spinning, but we need a fall-back replanning
#recovery_behavior_enabled: true
#recovery_behaviors:
#- name: 'super_conservative_reset1'
#type: 'clear_costmap_recovery/ClearCostmapRecovery'
#- name: 'conservative_reset1'
#type: 'clear_costmap_recovery/ClearCostmapRecovery'
#- name: 'aggressive_reset1'
#type: 'clear_costmap_recovery/ClearCostmapRecovery'
#- name: 'clearing_rotation1'
#type: 'rotate_recovery/RotateRecovery'
#- name: 'super_conservative_reset2'
#type: 'clear_costmap_recovery/ClearCostmapRecovery'
#- name: 'conservative_reset2'
#type: 'clear_costmap_recovery/ClearCostmapRecovery'
#- name: 'aggressive_reset2'
#type: 'clear_costmap_recovery/ClearCostmapRecovery'
#- name: 'clearing_rotation2'
#type: 'rotate_recovery/RotateRecovery'
#super_conservative_reset1:
#reset_distance: 3.0
#conservative_reset1:
#reset_distance: 1.5
#aggressive_reset1:
#reset_distance: 0.0
#super_conservative_reset2:
#reset_distance: 3.0
#conservative_reset2:
#reset_distance: 1.5
#aggressive_reset2:
#reset_distance: 0.0






global_planner_params.yaml
GlobalPlanner: # Also see: http://wiki.ros.org/global_planner
old_navfn_behavior: false # Exactly mirror behavior of navfn, use defaults for other boolean parameters, default false
use_quadratic: true # Use the quadratic approximation of the potential. Otherwise, use a simpler calculation, default true
use_dijkstra: true # Use dijkstra's algorithm. Otherwise, A*, default true
use_grid_path: false # Create a path that follows the grid boundaries. Otherwise, use a gradient descent method, default false
allow_unknown: true # Allow planner to plan through unknown space, default true
#Needs to have track_unknown_space: true in the obstacle / voxel layer (in costmap_commons_param) to work
planner_window_x: 0.0 # default 0.0
planner_window_y: 0.0 # default 0.0
default_tolerance: 0.0 # If goal in obstacle, plan to the closest point in radius default_tolerance, default 0.0
publish_scale: 100 # Scale by which the published potential gets multiplied, default 100
planner_costmap_publish_frequency: 0.0 # default 0.0
lethal_cost: 253 # default 253
neutral_cost: 50 # default 50
cost_factor: 3.0 # Factor to multiply each cost from costmap by, default 3.0
publish_potential: true # Publish Potential Costmap (this is not like the navfn pointcloud2 potential), default true
navfn_global_planner_params.yaml
NavfnROS:
visualize_potential: false #Publish potential for rviz as pointcloud2, not really helpful, default false
allow_unknown: false #Specifies whether or not to allow navfn to create plans that traverse unknown space, default true
#Needs to have track_unknown_space: true in the obstacle / voxel layer (in costmap_commons_param) to work
planner_window_x: 0.0 #Specifies the x size of an optional window to restrict the planner to, default 0.0
planner_window_y: 0.0 #Specifies the y size of an optional window to restrict the planner to, default 0.0
default_tolerance: 0.0 #If the goal is in an obstacle, the planer will plan to the nearest point in the radius of default_tolerance, default 0.0
#The area is always searched, so could be slow for big values

costmap_common_params.yaml
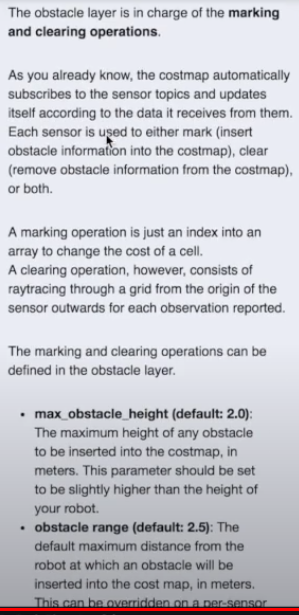
max_obstacle_height: 0.60 # assume something like an arm is mounted on top of the robot
# Obstacle Cost Shaping (http://wiki.ros.org/costmap_2d/hydro/inflation)
robot_radius: 0.20 # distance a circular robot should be clear of the obstacle (kobuki: 0.18)
# footprint: [[x0, y0], [x1, y1], ... [xn, yn]] # if the robot is not circular
map_type: voxel
obstacle_layer:
enabled: true
max_obstacle_height: 0.6
origin_z: 0.0
z_resolution: 0.2
z_voxels: 10
unknown_threshold: 15
mark_threshold: 0
combination_method: 1
track_unknown_space: true #true needed for disabling global path planning through unknown space
obstacle_range: 5.5
raytrace_range: 6.0
origin_z: 0.0
#z_resolution: 0.2
#z_voxels: 2
publish_voxel_map: false
observation_sources: scan #bump
scan: {data_type: LaserScan, topic: kobuki/laser/scan, marking: true, clearing: true, inf_is_valid: true}
#bump:
#data_type: PointCloud2
#topic: mobile_base/sensors/bumper_pointcloud
#marking: true
#clearing: false
#min_obstacle_height: 0.0
#max_obstacle_height: 0.15
# for debugging only, let's you see the entire voxel grid
#cost_scaling_factor and inflation_radius were now moved to the inflation_layer ns
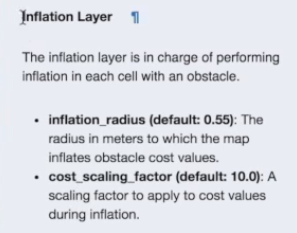
inflation_layer:
enabled: true
cost_scaling_factor: 5.0 # exponential rate at which the obstacle cost drops off (default: 10)
inflation_radius: 0.5 # max. distance from an obstacle at which costs are incurred for planning paths.
static_layer:
enabled: true






global_costmap_params.yaml
global_costmap:
global_frame: /map
robot_base_frame: /base_footprint
update_frequency: 1.0
publish_frequency: 0.5
static_map: true
transform_tolerance: 0.5
plugins:
- {name: static_layer, type: "costmap_2d::StaticLayer"}
- {name: obstacle_layer, type: "costmap_2d::VoxelLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
local planner


dwa_local_planner_params.yaml
DWAPlannerROS:
# Robot Configuration Parameters - Kobuki
max_vel_x: 0.5 # 0.55
min_vel_x: 0.0
max_vel_y: 0.0 # diff drive robot
min_vel_y: 0.0 # diff drive robot
max_trans_vel: 0.5 # choose slightly less than the base's capability
min_trans_vel: 0.1 # this is the min trans velocity when there is negligible rotational velocity
trans_stopped_vel: 0.1
# Warning!
# do not set min_trans_vel to 0.0 otherwise dwa will always think translational velocities
# are non-negligible and small in place rotational velocities will be created.
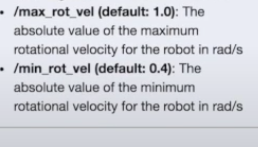
max_rot_vel: 5.0 # choose slightly less than the base's capability
min_rot_vel: 0.4 # this is the min angular velocity when there is negligible translational velocity
rot_stopped_vel: 0.4
acc_lim_x: 1.0 # maximum is theoretically 2.0, but we
acc_lim_theta: 2.0
acc_lim_y: 0.0 # diff drive robot
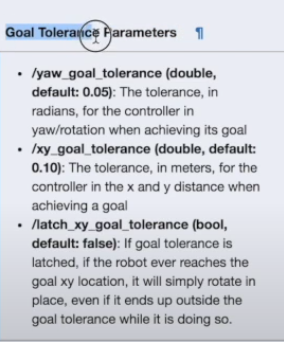
# Goal Tolerance Parameters
yaw_goal_tolerance: 0.3 # 0.05
xy_goal_tolerance: 0.15 # 0.10
# latch_xy_goal_tolerance: false
# Forward Simulation Parameters
sim_time: 1.0 # 1.7
vx_samples: 6 # 3
vy_samples: 1 # diff drive robot, there is only one sample
vtheta_samples: 20 # 20
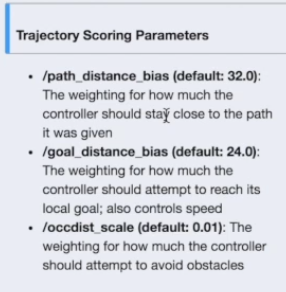
# Trajectory Scoring Parameters
path_distance_bias: 64.0 # 32.0 - weighting for how much it should stick to the global path plan
goal_distance_bias: 24.0 # 24.0 - wighting for how much it should attempt to reach its goal
occdist_scale: 0.5 # 0.01 - weighting for how much the controller should avoid obstacles
forward_point_distance: 0.325 # 0.325 - how far along to place an additional scoring point
stop_time_buffer: 0.2 # 0.2 - amount of time a robot must stop in before colliding for a valid traj.
scaling_speed: 0.25 # 0.25 - absolute velocity at which to start scaling the robot's footprint
max_scaling_factor: 0.2 # 0.2 - how much to scale the robot's footprint when at speed.
# Oscillation Prevention Parameters
oscillation_reset_dist: 0.05 # 0.05 - how far to travel before resetting oscillation flags
# Debugging
publish_traj_pc : true
publish_cost_grid_pc: true
global_frame_id: odom
# Differential-drive robot configuration - necessary?
# holonomic_robot: false



local_costmap:
global_frame: odom
robot_base_frame: /base_footprint
update_frequency: 5.0
publish_frequency: 2.0
static_map: false
rolling_window: true
width: 4.0
height: 4.0
resolution: 0.05
transform_tolerance: 0.5
plugins:
- {name: obstacle_layer, type: "costmap_2d::VoxelLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
-