前言
在机器人或者无人车规划的时候,通常需要引入Frenet坐标系.这篇文章主要介绍了笛卡尔坐标系和Frenet坐标系之间的转换.
什么是Frenet坐标系
Frenet坐标系是一种以比传统x,y笛卡尔坐标更直观的方式表示道路位置的方式。用Frenet坐标,我们使用变量 s和d描述车辆在道路上的位置。该s坐标表示沿道路的距离(也称为纵向位移)和d坐标表示道路上的左右位置(也称为横向位移)。
由于通常道路都是曲折的,这样的话用笛卡尔坐标系描述道路会非常复杂,但是如果采用Frenet坐标系,则会非常直观和简单.
下图是机器人在Frenet 坐标系下生成的轨迹.
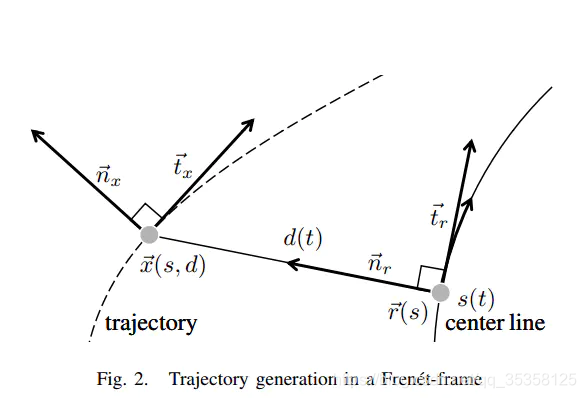
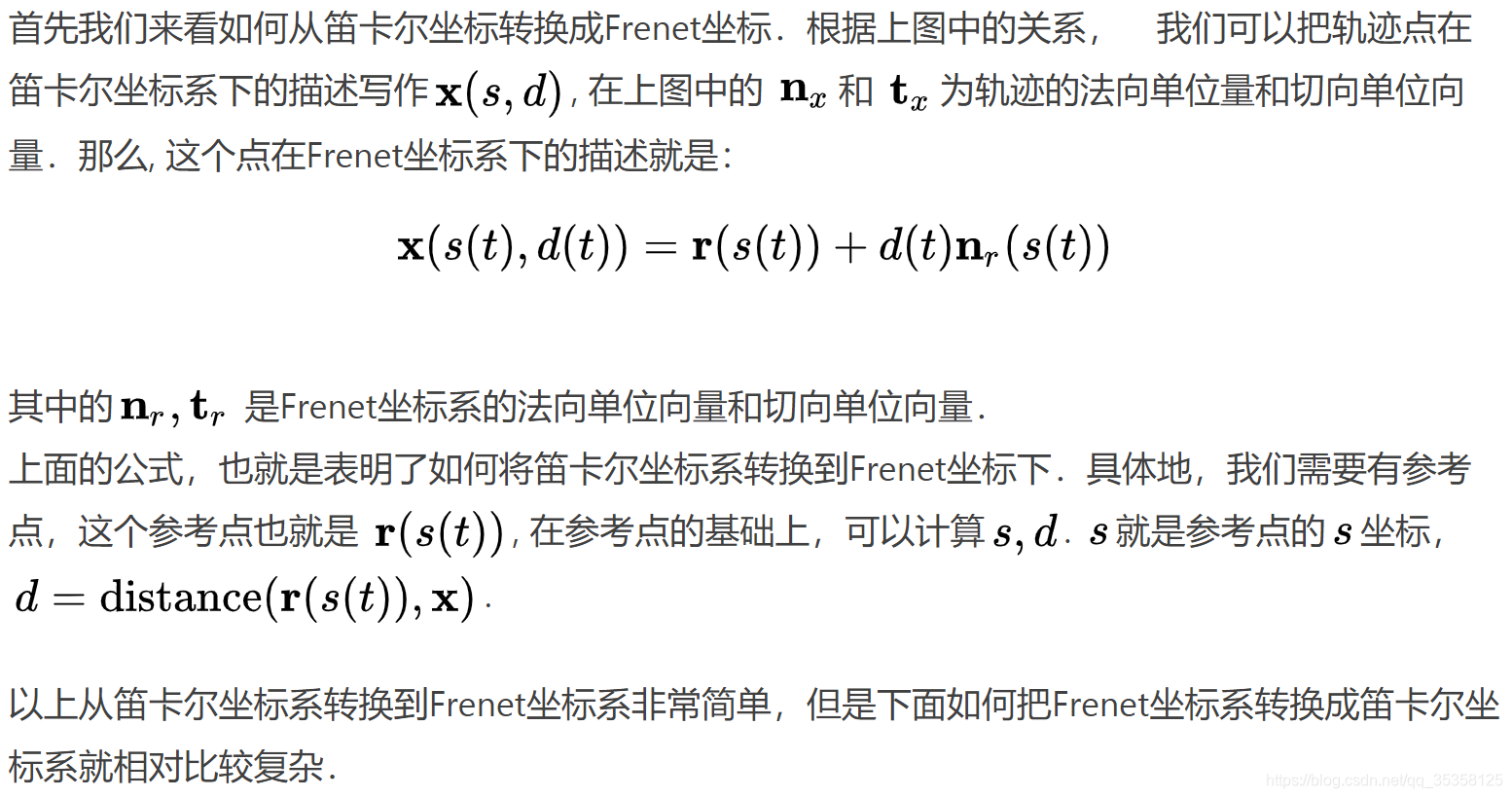
从笛卡尔坐标转换到Frenet坐标
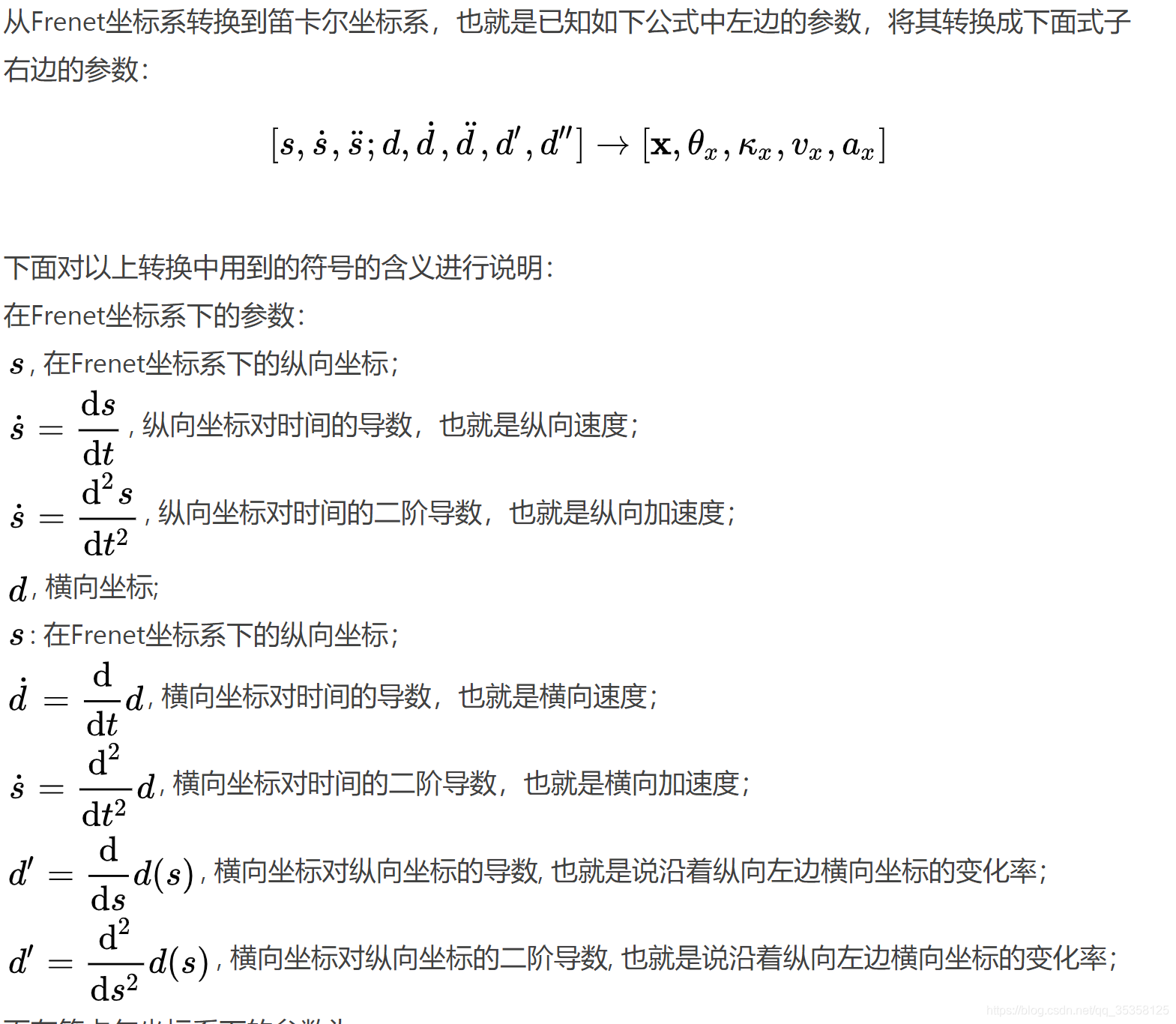
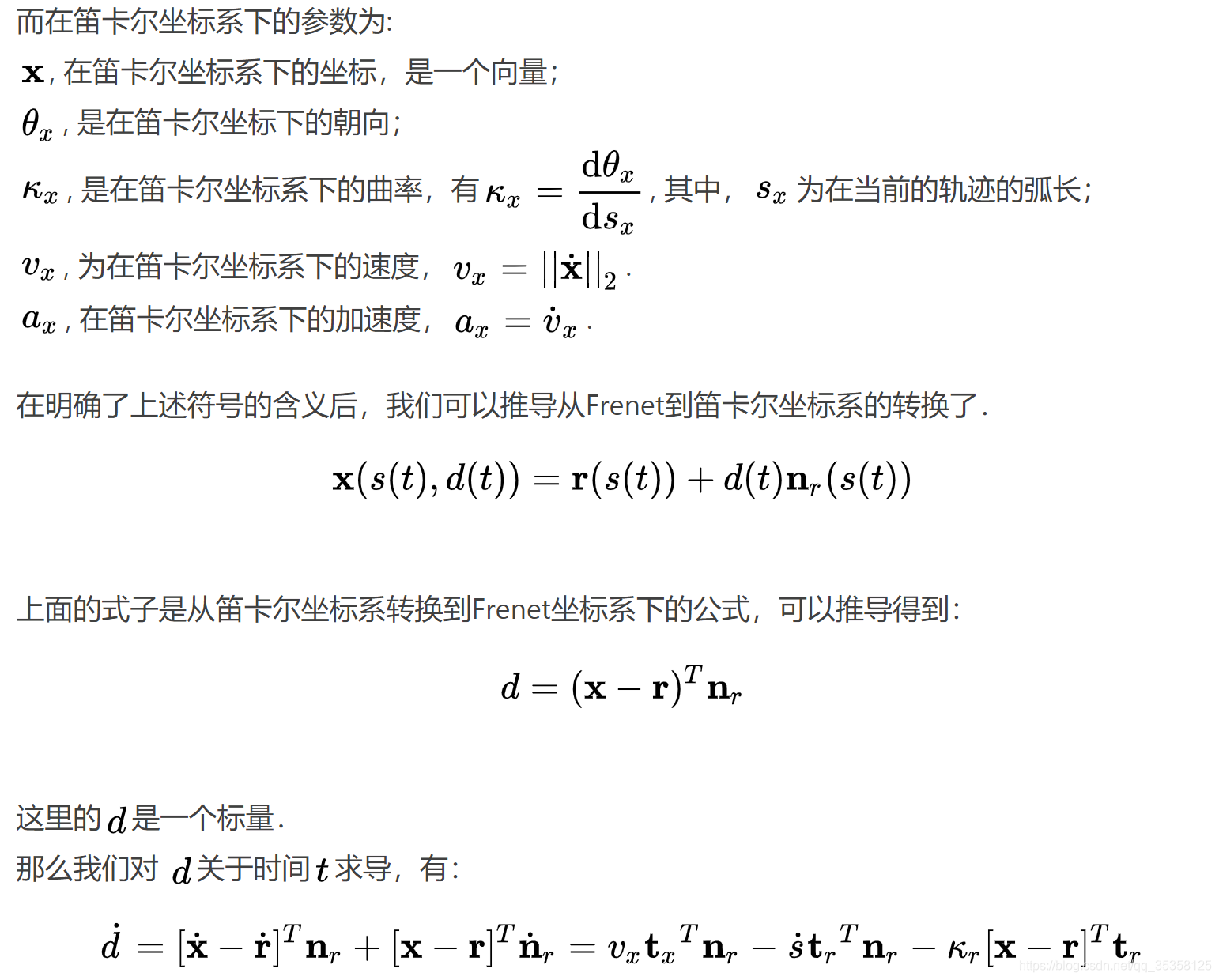
Frenet坐标系转换到笛卡尔坐标系


总结
本文主要总结了笛卡尔坐标系和Frenet坐标系之间的转换关系,这个转换关系是轨迹规划中一个非常重要的内容,因此总结,以备后用.