现代机器人控制的基础是模型。
最重要的模型是运动学模型,包括刚体动力学模型和弹性动力学模型。通过可配置的模型,有可能用同一种方法控制各种类型的机器人。ABB公司采用模型配置方法,可以控制一系列机器人。
基于模型的控制包括基于模型的轨迹生成和基于模型的轴控(QuickMove)。
基于模型的轨迹生成
轨迹生成,通过在线机器人速度和加速度优化来获得。生成路径的任务可以表述为:必须严格遵循用户指定的路径,并且只有在机器人运动受到机器人组件的约束以机械方式或电气方式限制机器人运动的情况下,才必须降低指定速度。一些组件约束的例子比如,最大电机转矩,最大电机速度和机械结构的最大承受力矩。
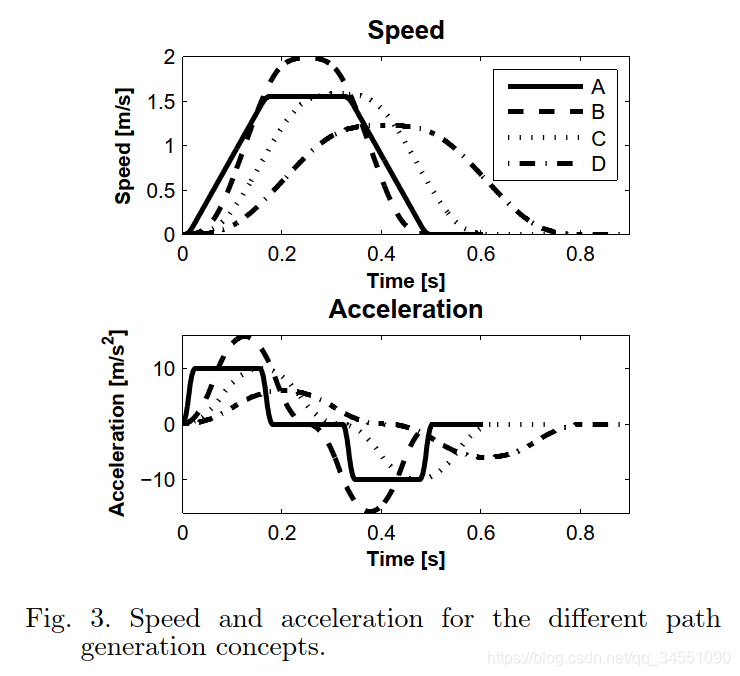
不同轨迹对比:
A:QuickMove,一种基于模型的轨迹生成和基于模型的轴控的方法;
B:和A相同的周期时间,比A高50% 的加速度,工业上常用的运动控制轨迹;
C:和B相同的控制,和A相同的加速度,导致增加20%的周期时间;
D:不采用动力学模型,运动周期时间增加60%。
轨迹生成的任务可以采用一种时间最优策略:以速度为变量,考虑机器人约束的同时,使得运动时间的最小化。
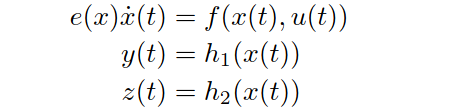
基于模型的控制
控制的任务表述为:在测量和模型的干扰和不确定性影响下,必须遵循高精度的参考路径。
基于非线性模型的控制:
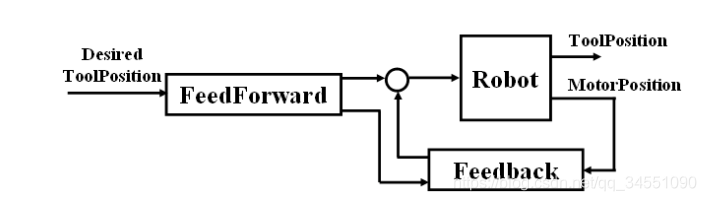
基于模型控制技术可以将轨迹跟踪误差降低50%,运行时间减小20%。
参考文献:A New Concept for Motion Control of Industrial Robots