
一 程序修改
在VINS_Course源码中对如下函数进行修改:
在run_eurco.cpp中:
//把IMU数据放进VINS---基本和之前的函数差不多
void PubImuData()
{
string sImu_data_file = "/home/nnz/data/vio/bin/imu_pose_noise.txt";//带噪声的IMU数据的路径
cout << "1 PubImuData start sImu_data_filea: " << sImu_data_file << endl;
ifstream fsImu;//文件流对象
fsImu.open(sImu_data_file.c_str());
if (!fsImu.is_open())
{
cerr << "Failed to open imu file! " << sImu_data_file << endl;
return;
}
std::string sImu_line;
double dStampNSec = 0.0;//时间戳
double tmp;
Vector3d vAcc;//加速度
Vector3d vGyr;
while (std::getline(fsImu, sImu_line) && !sImu_line.empty()) // read imu data sImu_line获得每行的文件流
{
// timestamp (1),imu quaternion(4),imu position(3),imu gyro(3),imu acc(3)
std::istringstream ssImuData(sImu_line);//ssImuData得到每行文件的内容
ssImuData >> dStampNSec;//时间戳
//利用循环跳过imu quaternion(4),imu position(3)
for(int i=0;i<7;i++)
ssImuData>>tmp;
ssImuData>>vGyr.x() >> vGyr.y() >> vGyr.z() >> vAcc.x() >> vAcc.y() >> vAcc.z();
// 时间单位为 s
pSystem->PubImuData(dStampNSec, vGyr, vAcc);//PubImuData不需要改变 用来将不同时刻下的IMU数据放进VINS系统
usleep(5000*nDelayTimes);//休眠??
}
fsImu.close();
}
//把相机的特征点放进VINS---里面用到的PubSimImageData函数要在system.cpp写入
void PubImageData()
{
string sImage_file = "/home/nnz/data/vio/bin/cam_pose.txt"; //相机相关数据的路径
//
//包含时间戳的文件
cout << "1 PubImageData start sImage_file: " << sImage_file << endl;
ifstream fsImage;//文件流对象
fsImage.open(sImage_file.c_str());
if (!fsImage.is_open())
{
cerr << "Failed to open image file! " << sImage_file << endl;
return;
}
std::string sImage_line;
double dStampNSec;
string sImgFileName;
int n=0;
// cv::namedWindow("SOURCE IMAGE", CV_WINDOW_AUTOSIZE);
//这个循环是遍历所有的相机
while (std::getline(fsImage, sImage_line) && !sImage_line.empty())//sImage_line是cam_pose每行的数据流
{
std::istringstream ssImgData(sImage_line);//是cam_pose每行的内容
ssImgData >> dStampNSec; //读入时间戳
cout<<"cam time: "<<fixed<<dStampNSec<<endl;
// all_points_ 文件存储的是house模型的线特征,每行4个数,对应该线两端点在归一化平面的坐标
//all_points_ 文件每行的内容是 x, y, z, 1, u, v 这里的u v是归一化下的x ,y 不是像素坐标
//在函数PubSimImageData中会算出具体特征点的像素坐标
string all_points_file_name = "/home/nnz/data/vio/bin/keyframe/all_points_" + to_string(n)+ ".txt"; //第n个相机对应的观测数据的文件名
cout<<"points_file: "<<all_points_file_name<<endl;
vector<cv::Point2f> FeaturePoints;//容器FeaturePoints存放一个相机的特征点(归一化坐标)
std::ifstream f;
f.open(all_points_file_name);
//这个循环是遍历每个相机的特征点信息
// file content in each line: x, y, z, 1, u, v
//经过这个循环把all_points_的特征点都放在FeaturePoints了
while(!f.eof())
{
std::string s;
std::getline(f,s);//得到all_points_的文件流s
// 一行两个点连成线,获取每行点判断一下是否之前获取过
if(!s.empty())
{
std::stringstream ss;//
ss << s;//ss得到每行的内容
double tmp;//跳过 x y z 1
for(int i=0;i<4;i++)
ss>>tmp;
float px,py;
ss >> px;
ss >> py;
cv::Point2f pt( px, py);//归一化坐标
FeaturePoints.push_back(pt);
}
}
// cout << "All points:" << endl;
// for(auto point : FeaturePoints){
// cout << point << " ";
// }
// cout << endl;
pSystem->PubSimImageData(dStampNSec, FeaturePoints);//把每一个图片的特征点 放进VINS系统里
usleep(50000*nDelayTimes);
n++;
}
fsImage.close();
}
下面的PubSimImageData函数里没有计算特征点速度,当然自己写了带有计算速度的函数,但是程序有问题,也有可能是我的原理有问题。QAQ
我认为特征点速度是(不同相机下的同一特征点像素位置差) / (相机间的时间差)
在system.cpp中:
void System::PubSimImageData(double dStampSec, const vector<cv::Point2f> &FeaturePoints)
{
if (!init_feature)//
{
cout << "1 PubImageData skip the first detected feature, which doesn't contain optical flow speed" << endl;
init_feature = 1;
return;
}
if (first_image_flag)//
{
cout << "2 PubImageData first_image_flag" << endl;
first_image_flag = false;
first_image_time = dStampSec;
last_image_time = dStampSec;
return;
}
// detect unstable camera stream 发现时间戳不连续甚至倒退,提示重新输入
if (dStampSec - last_image_time > 1.0 || dStampSec < last_image_time)
{
cerr << "3 PubImageData image discontinue! reset the feature tracker!" << endl;
first_image_flag = true;
last_image_time = 0;
pub_count = 1;
return;
}
last_image_time = dStampSec;
// frequency control 控制频率设定小于某一阈值
// if (round(1.0 * pub_count / (dStampSec - first_image_time)) <= FREQ)
// {
// PUB_THIS_FRAME = true;
// // reset the frequency control TODO question:若当前连续图像序列的频率与 FREQ=10 误差在一定范围内重置?
// if (abs(1.0 * pub_count / (dStampSec - first_image_time) - FREQ) < 0.01 * FREQ)
// {
// first_image_time = dStampSec;
// pub_count = 0;
// }
// }
// else
// {
// PUB_THIS_FRAME = false;
// }
PUB_THIS_FRAME = true;
TicToc t_r;
// cout << "3 PubImageData t : " << dStampSec << endl;
// TODO Bookmark:获取图像特征点
// trackerData[0].readImage(img, dStampSec);
// trackerData[0].readPoints(FeaturePoints, dStampSec);
// for (unsigned int i = 0;; i++)
// {
// bool completed = false;
// completed |= trackerData[0].updateID(i);
//
// if (!completed)
// break;
// }
if (PUB_THIS_FRAME)
{
pub_count++;//pub进VINS的相机的个数
shared_ptr<IMG_MSG> feature_points(new IMG_MSG());
//这里的 IMG_MSG 的数据结构如下
/* struct IMG_MSG {
double header;
vector<Vector3d> points;//相机下的3d点
vector<int> id_of_point;//点对应的id
vector<float> u_of_point;//像素u
vector<float> v_of_point;//像素v
vector<float> velocity_x_of_point;//u的速度
vector<float> velocity_y_of_point;//v的速度
};*/
feature_points->header = dStampSec;//
vector<set<int>> hash_ids(NUM_OF_CAM);
//这里其实默认是1
for (int i = 0; i < NUM_OF_CAM; i++)
{
// auto &un_pts = trackerData[i].cur_un_pts;// 去畸变的归一化图像坐标
// auto &cur_pts = trackerData[i].cur_pts;// 当前追踪到的特征点
// auto &ids = trackerData[i].ids;
// auto &pts_velocity = trackerData[i].pts_velocity;
//遍历相机的所有特征点
for (unsigned int j = 0; j < FeaturePoints.size(); j++)
{
// if (trackerData[i].track_cnt[j] > 1)
// {
// int p_id = ids[j];
int p_id = j;
hash_ids[i].insert(p_id);
double x = FeaturePoints[j].x;
double y = FeaturePoints[j].y;
double z = 1;
feature_points->points.push_back(Vector3d(x, y, z));
feature_points->id_of_point.push_back(p_id * NUM_OF_CAM + i);
// feature_points->u_of_point.push_back(cur_pts[j].x); // 像素坐标
// feature_points->v_of_point.push_back(cur_pts[j].y);
// feature_points->velocity_x_of_point.push_back(pts_velocity[j].x);
// feature_points->velocity_y_of_point.push_back(pts_velocity[j].y);
cv::Point2f pixel_point;//特征点对应的像素坐标
pixel_point.x = 460 * x + 255;
pixel_point.y = 460 * y + 255;
feature_points->u_of_point.push_back(pixel_point.x); // 像素坐标
feature_points->v_of_point.push_back(pixel_point.y);
这里默认速度为0不考虑
feature_points->velocity_x_of_point.push_back(0);
feature_points->velocity_y_of_point.push_back(0);
// }
}
// skip the first image; since no optical speed on frist image
if (!init_pub)
{
cout << "4 PubImage init_pub skip the first image!" << endl;
init_pub = 1;
}
else
{
m_buf.lock();
feature_buf.push(feature_points);
// cout << "5 PubImage t : " << fixed << feature_points->header
// << " feature_buf size: " << feature_buf.size() << endl;
m_buf.unlock();
con.notify_one();
}
}
}
}
system.h中:加入
void PubSimImageData(double dStampSec, const vector<cv::Point2f> &FeaturePoints);
这里我给出自己写的带有计算特征点速度的PubSimImageData函数,但是有问题,网友们有解决方案的可以Q我
void System::PubsimuImageData(double dStampSec, const vector<cv::Point2f> &FeaturePoints)
{
/*if (!init_feature)
{
cout << "1 PubImageData skip the first detected feature, which doesn't contain optical flow speed" << endl;
init_feature = 1;
return;
}*/
/*if (first_image_flag)
{
cout << "2 PubImageData first_image_flag" << endl;
first_image_flag = false;
first_image_time = dStampSec;
last_image_time = dStampSec;
return;
}*/
// detect unstable camera stream
if (dStampSec - last_image_time > 1.0 || dStampSec < last_image_time)
{
cerr << "3 PubImageData image discontinue! reset the feature tracker!" << endl;
first_image_flag = true;
last_image_time = 0;
pub_count = 1;
return;
}
last_image_time = dStampSec;
/*// frequency control
if (round(1.0 * pub_count / (dStampSec - first_image_time)) <= FREQ)
{
PUB_THIS_FRAME = true;
// reset the frequency control
if (abs(1.0 * pub_count / (dStampSec - first_image_time) - FREQ) < 0.01 * FREQ)
{
first_image_time = dStampSec;
pub_count = 0;
}
}
else
{
PUB_THIS_FRAME = false;
}*/
PUB_THIS_FRAME=true;
TicToc t_r;
/*// cout << "3 PubImageData t : " << dStampSec << endl;
for (unsigned int i = 0;; i++)
{
bool completed = false;
completed |= trackerData[0].updateID(i);
if (!completed)
break;
}*/
if (PUB_THIS_FRAME)
{
pub_count++;//读入的相机数据++
/*struct IMG_MSG {
double header;
vector<Vector3d> points;
vector<int> id_of_point;
vector<float> u_of_point;
vector<float> v_of_point;
vector<float> velocity_x_of_point;
vector<float> velocity_y_of_point;
};*/
shared_ptr<IMG_MSG> feature_points(new IMG_MSG());
feature_points->header = dStampSec;
vector<set<int>> hash_ids(NUM_OF_CAM);//NUM_OF_CAM是1,因为本函数是对一张图片的数据作处理
//遍历相机
for (int i = 0; i < NUM_OF_CAM; i++)
{
/* auto &un_pts = trackerData[i].cur_un_pts;//去畸变的归一化图像坐标
auto &cur_pts = trackerData[i].cur_pts;//当前追踪到的特征点
auto &ids = trackerData[i].ids;//id
auto &pts_velocity = trackerData[i].pts_velocity;//点的速度??*/
//遍历当前相机所有特征点
//获得图像之间的时间间隔
tmp_time[cam_num-1]=dStampSec;
for(int k=0;k<cam_num;k++)
{
if(k==0)
delta_time[k]=tmp_time[k];
else
delta_time[k]=dStampSec-tmp_time[k-1];
}
if(dStampSec==0)//相机第一个的时候 没有速度
{
for (unsigned int j = 0; j < FeaturePoints.size(); j++)
{
if (trackerData[i].track_cnt[j] > 1)//
{
/*int p_id = ids[j];
hash_ids[i].insert(p_id);
double x = un_pts[j].x;
double y = un_pts[j].y;*/
double x=FeaturePoints[j].x;//归一化下的x
double y=FeaturePoints[j].y;//归一化下的y
double z = 1;
feature_points->points.push_back(Vector3d(x, y, z));//把特征点的归一化坐标放进去
feature_points->id_of_point.push_back(j * NUM_OF_CAM + i);//特征点在相机中的id
/*feature_points->u_of_point.push_back(cur_pts[j].x); //像素坐标
feature_points->v_of_point.push_back(cur_pts[j].y);*/
cv::Point2f pixel_p;//存放特征点(归一化)的像素坐标
//公式: u=fx*x+cx 这里的x y是归一化下的x y
// v=fy*y+cy
pixel_p.x=460*x+255;
pixel_p.y=460*y+255;
feature_points->u_of_point.push_back(pixel_p.x); //像素坐标
feature_points->v_of_point.push_back(pixel_p.y);
feature_points->velocity_x_of_point.push_back(0);
feature_points->velocity_y_of_point.push_back(0);
}
}
}
else
{
for (unsigned int j = 0; j < FeaturePoints.size(); j++)
{
if (trackerData[i].track_cnt[j] > 1)//
{
/*int p_id = ids[j];
hash_ids[i].insert(p_id);
double x = un_pts[j].x;
double y = un_pts[j].y;*/
double x=FeaturePoints[j].x;//归一化下的x
double y=FeaturePoints[j].y;//归一化下的y
double z = 1;
feature_points->points.push_back(Vector3d(x, y, z));//把特征点的归一化坐标放进去
feature_points->id_of_point.push_back(j * NUM_OF_CAM + i);//特征点在相机中的id
/*feature_points->u_of_point.push_back(cur_pts[j].x); //像素坐标
feature_points->v_of_point.push_back(cur_pts[j].y);*/
cv::Point2f pixel_p;//存放特征点(归一化)的像素坐标
//公式: u=fx*x+cx 这里的x y是归一化下的x y
// v=fy*y+cy
pixel_p.x=460*x+255;
pixel_p.y=460*y+255;
feature_points->u_of_point.push_back(pixel_p.x); //像素坐标
feature_points->v_of_point.push_back(pixel_p.y);
vector<double> tmp_pixel_x;
tmp_pixel_x[j]=pixel_p.x;
vector<double> tmp_pixel_y;
tmp_pixel_y[j]=pixel_p.y;
double vx=0,vy=0;
vx=(tmp_features[j].x-tmp_pixel_x[j])/delta_time[i];
vy=(tmp_features[j].y-tmp_pixel_y[j])/delta_time[i];
feature_points->velocity_x_of_point.push_back(vx);
feature_points->velocity_y_of_point.push_back(vy);
}
}
}
//}
// skip the first image; since no optical speed on frist image
if (!init_pub)
{
cout << "4 PubImage init_pub skip the first image!" << endl;
init_pub = 1;
}
else
{
m_buf.lock();
feature_buf.push(feature_points);
// cout << "5 PubImage t : " << fixed << feature_points->header
// << " feature_buf size: " << feature_buf.size() << endl;
m_buf.unlock();
con.notify_one();
}
//获得每个图片的特征点(像素坐标 保存上一次的特征点,用来计算速度,不知道这样写对不对,逻辑上应该没啥问题)
for(int n=0;n<FeaturePoints.size();n++)
{
double tmp_x=0,tmp_y=0;
tmp_x= FeaturePoints[n].x;
tmp_y= FeaturePoints[n].y;
tmp_features[n].x=460*tmp_x+255;
tmp_features[n].y=460*tmp_y+255;
}
cam_num++;
}
}
}
这里用到了一些全局变量:
vector<double> delta_time;//图片之间的时间间隔
vector<double> tmp_time;//用来存放每个图片的时间戳,用来算图片间的时间间隔
vector<double> tmp_pixel_x;//用来存放上一张图片的的像素坐标 来计算速度
vector<double> tmp_pixel_y;//
vector<cv::Point2f> tmp_features;//存放上一图片特征点,方便计算速度
int cam_num=1;//相机个数
二、对不同大小噪声的IMU数据和相机数据仿真
1无噪声
下面是中值积分法的加速度与角速度的代码:
//midOmega=(imudata[i].imu_gyro-imudata[i-1].imu_gyro_bias+imudata[i-1].imu_gyro-imudata[i-1].imu_gyro_bias)/2;
midOmega=(imudata[i].imu_gyro+imudata[i-1].imu_gyro)/2;//无噪声
// Eigen::Vector3d acc_w =0.5*( Qwbk * (imudata[i-1].imu_acc-imudata[i-1].imu_acc_bias) + gw +Qwbk1 * (imupose.imu_acc-imudata[i-1].imu_acc_bias) + gw );
Eigen::Vector3d acc_w =0.5*( Qwbk * (imudata[i-1].imu_acc) + gw +Qwbk1 * (imupose.imu_acc) + gw );//无噪声

2有噪声
在无噪声的代码中把无噪声的加上注释,把有噪声的注释取消即可
在第二讲的源代码的param.h文件中修改噪声大小
1、小噪声
double gyro_bias_sigma = 1.0e-7; 陀螺仪bias随机游走噪声 bias的导数服从高斯分布
double acc_bias_sigma = 0.000001; 加速度bias随机游走噪声 bias的导数服从高斯分布
double gyro_noise_sigma = 0.00015; 陀螺仪高斯白噪声 // rad/s * 1/sqrt(hz)
double acc_noise_sigma = 0.00019; 加速度高斯白噪声 // m/(s^2) * 1/sqrt(hz)
2、加大一点噪声
double gyro_bias_sigma = 1.0e-6; 陀螺仪bias随机游走噪声 bias的导数服从高斯分布
double acc_bias_sigma = 0.00001; 加速度bias随机游走噪声 bias的导数服从高斯分布
double gyro_noise_sigma = 0.0015; 陀螺仪高斯白噪声 // rad/s * 1/sqrt(hz)
double acc_noise_sigma = 0.0019; 加速度高斯白噪声 // m/(s^2) * 1/sqrt(hz)

3、再加大点噪声
double gyro_bias_sigma = 1.0e-5; 陀螺仪bias随机游走噪声 bias的导数服从高斯分布
double acc_bias_sigma = 0.0001; 加速度bias随机游走噪声 bias的导数服从高斯分布
double gyro_noise_sigma = 0.015; 陀螺仪高斯白噪声 // rad/s * 1/sqrt(hz)
double acc_noise_sigma = 0.019; 加速度高斯白噪声 // m/(s^2) * 1/sqrt(hz)

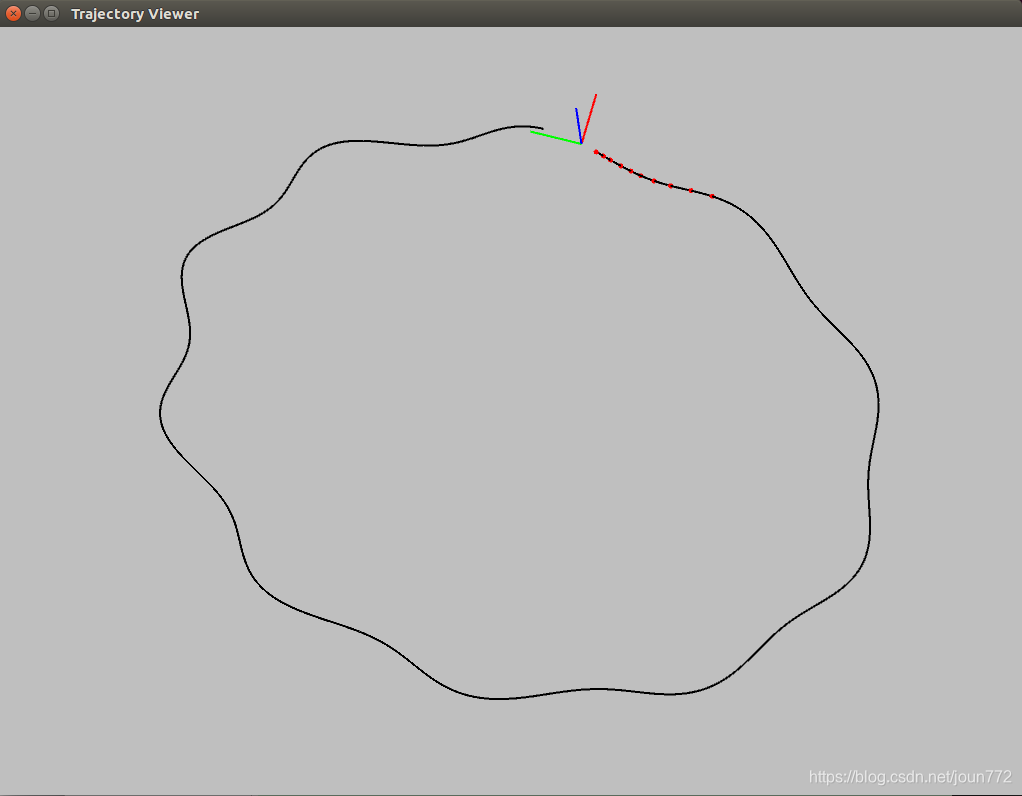
总结:从图可以看出,噪声越大,效果越差。