SSD,全称Single Shot MultiBox Detector,是Wei Liu在ECCV 2016上提出的一种目标检测算法,截至目前是主要的检测框架之一,相比Faster R-CNN有明显的速度优势,相比YOLO又有明显的mAP优势(不过已经被CVPR 2017的YOLO9000超越)。在VOC2007数据集上,SSD的结果为59FPS,mAP为74.3%;Faster R-CNN为7FPS,mAP为73.2%;YOLO为45FPS,mAP为63.4。
一)SSD网络结构
下图是原论文中,SSD-300网络结构和YOLO的对比,VGG网络在之前有所介绍。
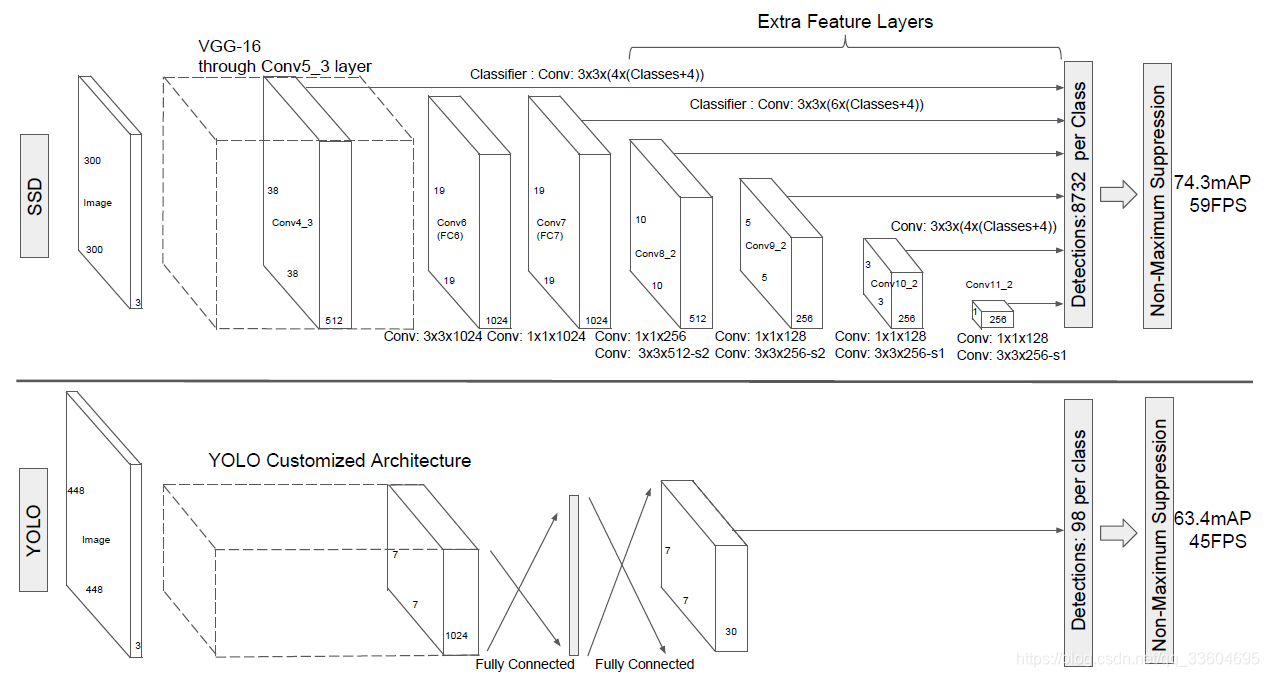
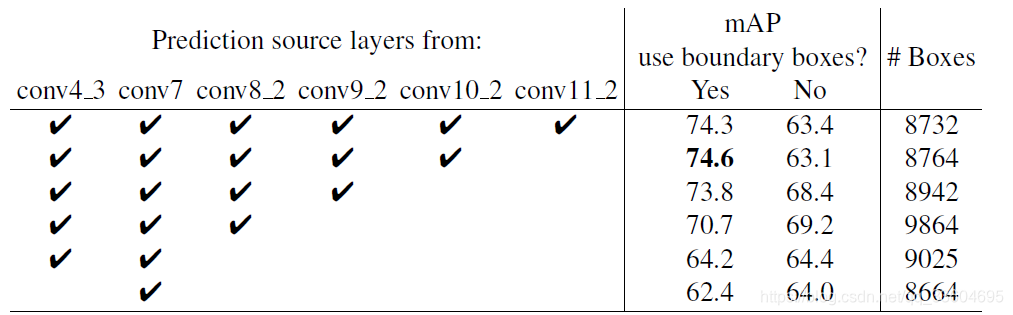
从图中可以看到,YOLO模型在卷积层后接两个全连接层,然后直接用于检测,相当于最终只利用了最高层(后)的特征图 ;而SSD采用了特征金字塔结构进行检测,即检测时利用了图中的conv4-3,conv-7(FC7),conv6-2,conv8-2,conv9_2,conv11_2共6个层次不同的feature maps,在多个feature maps上同时进行softmax分类和位置回归。不同层级的特征图,往往体现目标特征的尺度大小、抽象程度也不同,因此SSD相比之前的网络模型,效果有进一步地提升。作者在论文中也表述了使用多层次特征图的差异:当使用6个特征图时mAP为74.3%,仅使用conv7,或使用conv4_3+conv7时,mAP均低于65%。
二)Default boxes and aspect ratios
default box和anchor相似。
https://blog.csdn.net/a8039974/article/details/77592395
https://blog.csdn.net/qianqing13579/article/details/82106664