前提:
修改修改racecar_runway_navigation.launch文件后,运行roslaunch racecar_gazebo racecar_runway_navigation.launch出现红色报错。
ERROR: cannot launch node of type [move_base/move_base]: move_base
ROS path [0]=/opt/ros/indigo/share/ros
ROS path [1]=/home/qking/catkin_ws/src
ROS path [2]=/opt/ros/indigo/share

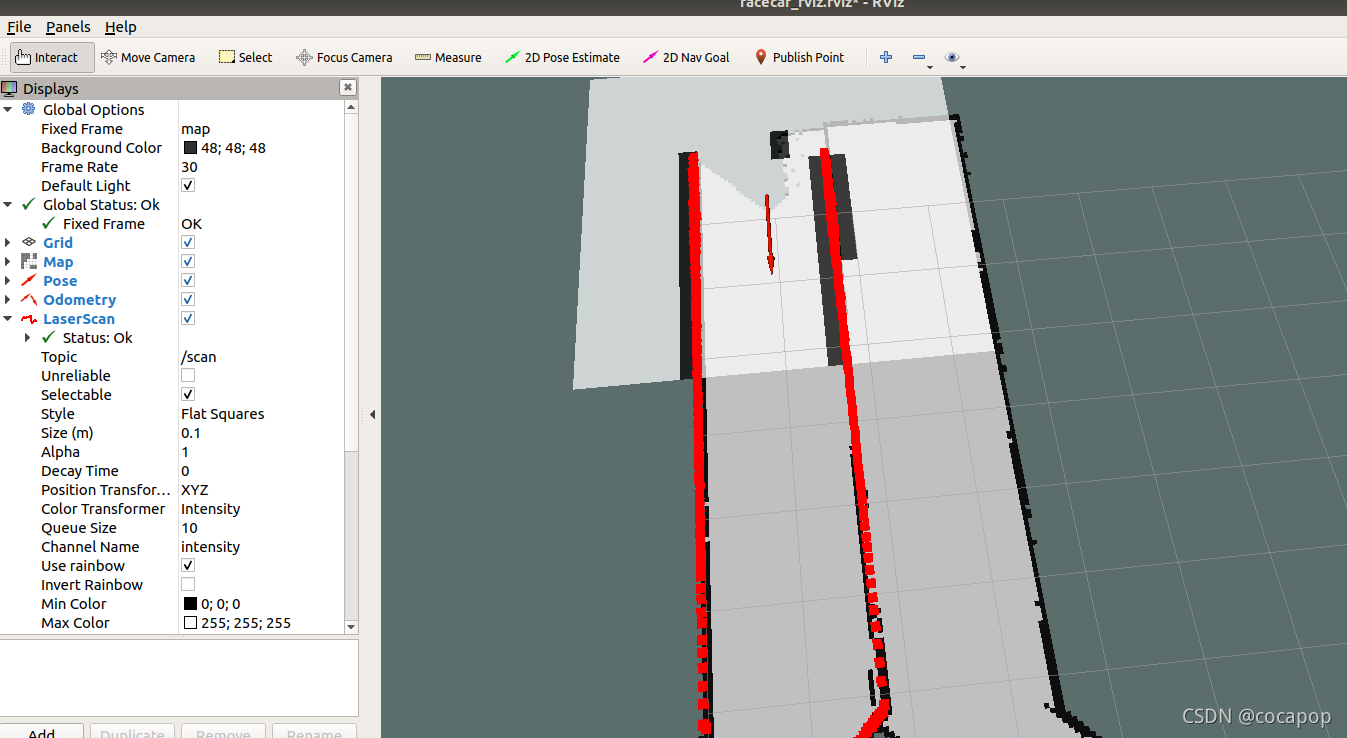
启动rviz会出现下面的情况:
解决:
安装 sudo apt-get install ros-melodic-cartographer 和 sudo apt install ros-melodic-navigation 然后再 sudo apt-get update。
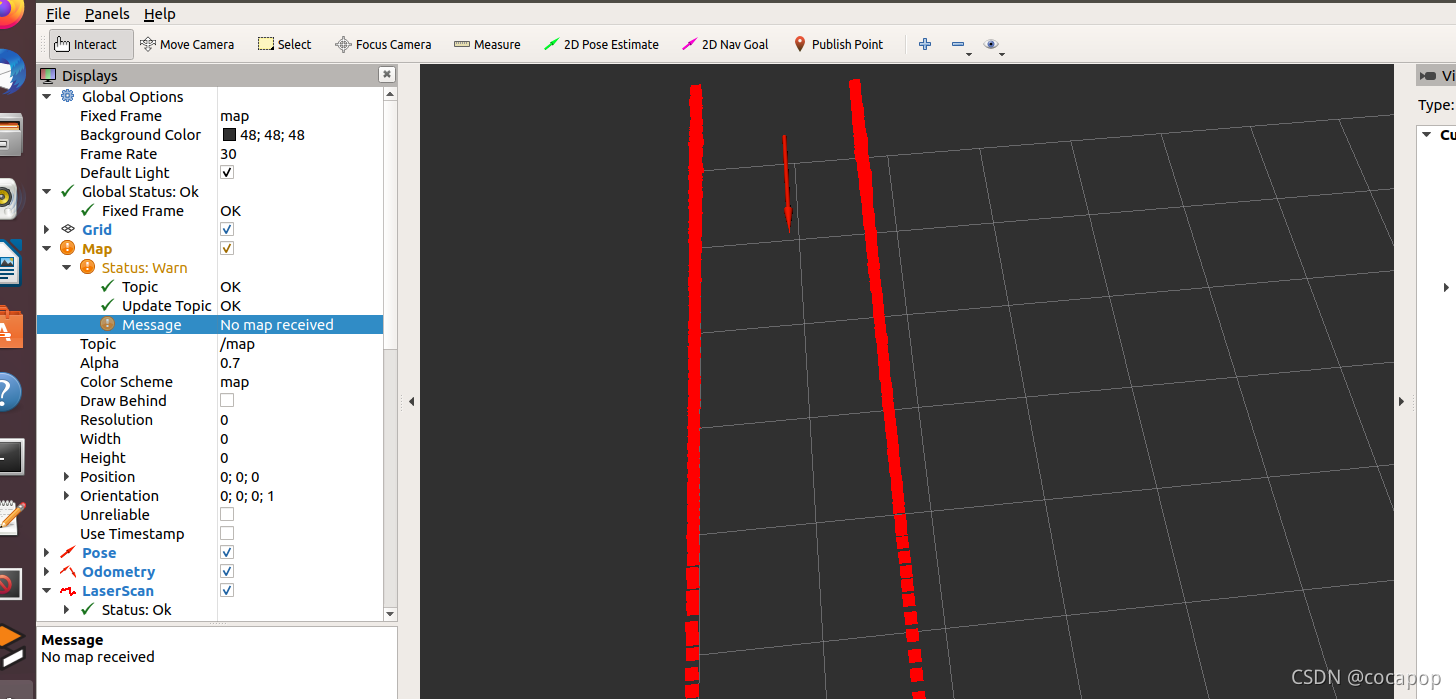
结果:红色报错没了。但是还有下面的问题,但是不影响跑地图。
地图能正常出来了。