致谢:ROS赵虚左老师
Introduction · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
参考赵虚左老师的实战教程

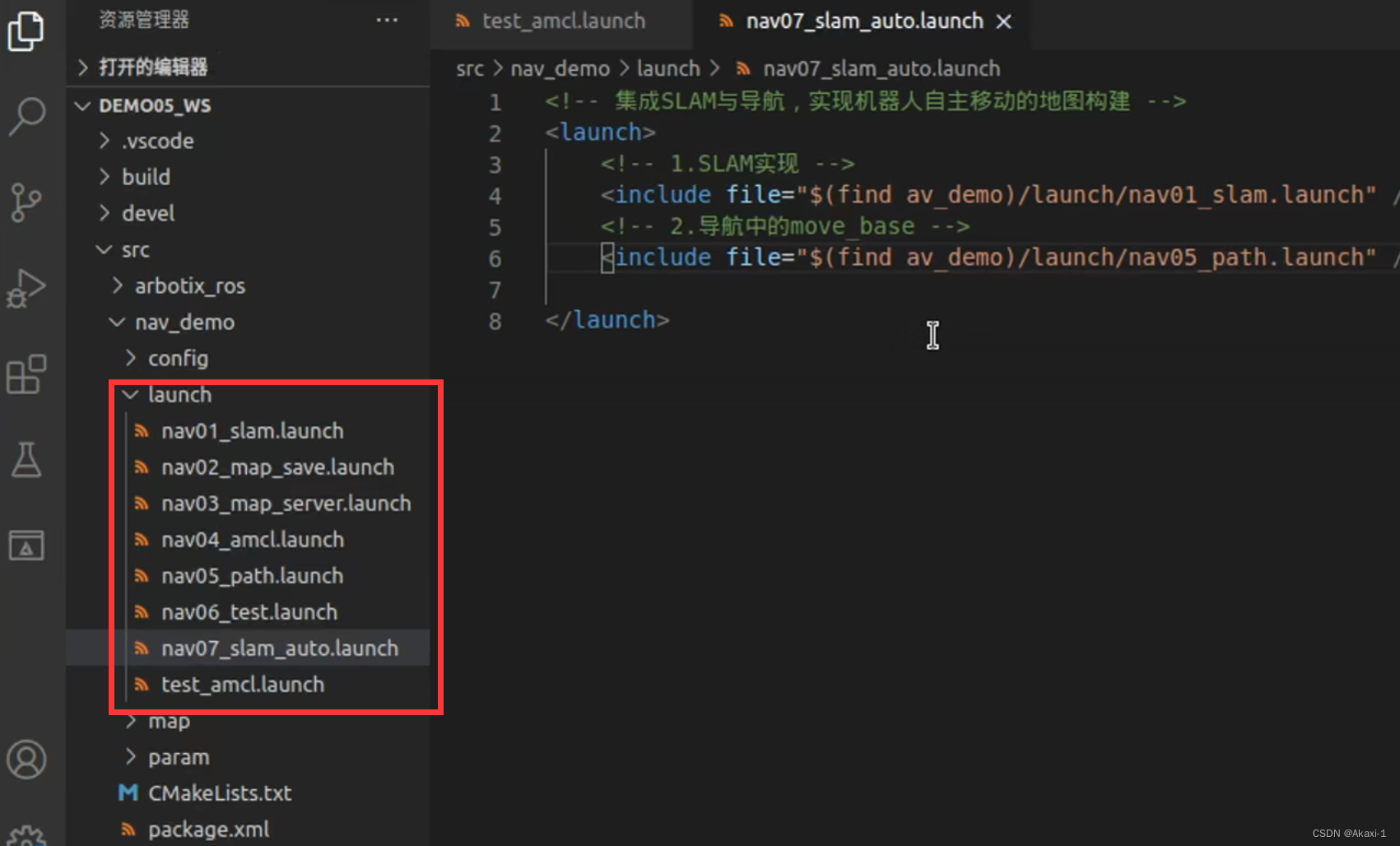
实现比较简单,步骤如下:
- 编写launch文件,集成SLAM与move_base相关节点;
- 执行launch文件并测试。
<launch>
<!-- 启动SLAM节点 -->
<include file="$(find mycar_nav)/launch/slam.launch" />
<!-- 运行move_base节点 -->
<include file="$(find mycar_nav)/launch/path.launch" />
<!-- 运行rviz -->
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find mycar_nav)/rviz/nav.rviz" />
</launch>
(更新ing)
2023.11.15
渝北仙桃数据谷