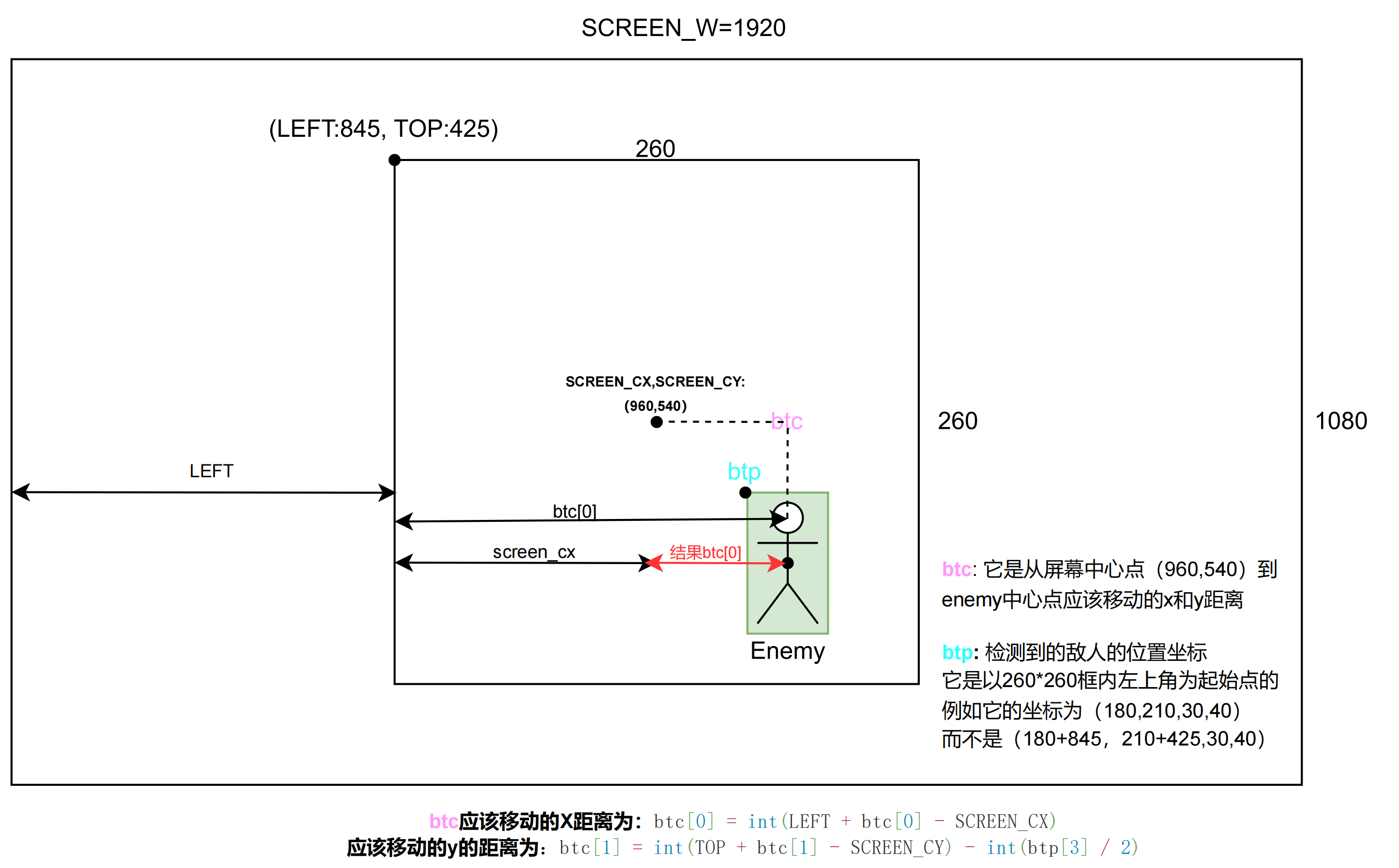
说明:
- 最外面1920*1080的大框是屏幕的长宽
- 第二个框是YOLO要在屏幕截取的位置
- 第三个人的框是对目标进行的位置标记(也就是model将目标标记了出来)
The main idea is as shown above:
The core code is as follows:
import math
from ctypes import *
import cv2
import numpy as np
import numpy.ctypeslib as npct
import pyautogui
SCREEN_W = 1920 # 屏幕长 : 3840
SCREEN_H = 1080 # 屏幕高 :2160
SCREEN_CX = SCREEN_W // 2 # 屏幕中心x
SCREEN_CY = SCREEN_H // 2 # 屏幕中心y
SCREEN_C = [SCREEN_CX, SCREEN_CY] # 屏幕中心坐标
SCREENSHOT_W = 260 # 截图区域长
SCREENSHOT_H = 260 # 截图区域高
LEFT = SCREEN_CX - SCREENSHOT_W // 2 # 检测框左上角x : 845
TOP = SCREEN_CY - SCREENSHOT_H // 2 # 检测框左上角y : 425
def ScreenShout():
"""
截取游戏中要检测区域的图片
:return: (h,w,c)
"""
img = pyautogui.screenshot(region=[LEFT, TOP, SCREENSHOT_W, SCREENSHOT_H])
return np.array(img)
class Detector:
def __init__(self, model_path, dll_path):
self.bbox_array = None
self.yolov5 = CDLL(dll_path)
self.yolov5.Detect.argtypes = [c_void_p, c_int, c_int, POINTER(c_ubyte), npct.ndpointer(dtype=np.float32, ndim=2, shape=(50, 6), flags="C_CONTIGUOUS")]
self.yolov5.Init.restype = c_void_p
self.yolov5.Init.argtypes = [c_void_p]
self.yolov5.cuda_free.argtypes = [c_void_p]
self.c_point = self.yolov5.Init(model_path)
def predict(self, img):
try:
rows, cols = img.shape[0], img.shape[1]
res_arr = np.zeros((50, 6), dtype=np.float32)
self.yolov5.Detect(self.c_point, c_int(rows), c_int(cols), img.ctypes.data_as(POINTER(c_ubyte)), res_arr)
self.bbox_array = res_arr[~(res_arr == 0).all(1)]
detections = []
for temp in self.bbox_array:
bbox = [temp[0], temp[1], temp[2], temp[3]] # xywh
clas = int(temp[4])
score = temp[5]
detections.append({'class': clas, 'conf': score, 'position': bbox})
return detections
except:
return None
def free(self):
self.yolov5.cuda_free(self.c_point)
def visualize(img, bbox_array):
for temp in bbox_array:
bbox = [temp[0], temp[1], temp[2], temp[3]] # xywh
clas = int(temp[4])
score = temp[5]
cv2.rectangle(img, (int(temp[0]), int(temp[1])), (int(temp[0] + temp[2]), int(temp[1] + temp[3])), (105, 237, 249), 2)
img = cv2.putText(img, "class:" + str(clas) + " " + str(round(score, 2)), (int(temp[0]), int(temp[1]) - 5), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (105, 237, 249), 1)
return img
def Center(p):
"""
返回中心坐标;
:param p: [lx,ly,w,h]->[左上x坐标,左上y坐标]
:return: [x,y]
"""
return [p[0] + p[2] // 2, p[1] + p[3] // 2]
def Distence(a, b):
"""
两点间距离(欧氏距离)
:param a:a点 (xa,ya)
:param b: b点(xb,yb)
:return: sqrt((xa-xb)**2 + (yb-ya)**2)
"""
return math.sqrt(((a[0] - b[0]) ** 2) + ((a[1] - b[1]) ** 2))
def FindBestCenter(detections):
"""
根据检测的结果,寻找最佳射击坐标
:param detections: 检测结果
:return:
:btp: 目标框的位置信息
:btc: 需要移动的X和Y的距离
"""
ch = {'p': [0, 0, 0, 0], 'd': float('inf'), 'c': 0.0} # 离枪口最近的头 p位置 d距离中心距离 c可信度
for dt in detections:
"""
遍历检测到的目标,找最近的头和身子
"""
if dt['conf'] > 0.6: # 只寻找置信度达到70%的头和身子
dt_p = dt['position'] # 检测出来的目标位置, 'position': [66.0, 109.0, 114.0, 118.0] 【左上角的坐标x, 左上角的坐标y, 目标框的宽, 目标框的高】
dt_c = Center(dt_p) # The center coordinates of the target position: (w,h)
if dt['class'] == 0: # 判断是不是最优头
dt_d = Distence(dt_c, SCREEN_C) # computer the distance of (enemy center and screen center).
if dt_d < ch['d']:
ch['p'] = dt['position']
ch['d'] = dt_d
ch['c'] = dt['conf']
pass
if ch['d'] < float('inf'): # 自动选择瞄准部位
btp = ch['p'] # target position coordinates
btc = Center(btp) # target center coordinates
btc[0] = int(LEFT + btc[0] - SCREEN_CX)
# 模式1、这样是瞄准人物的正中心
# btc[1] = int(TOP + btc[1] - SCREEN_CY)
# 模式2、这样是瞄准人物的头部正中心,就相当于在1的基础上减去半个目标框的y距离,这样就到了人物头部的最上面,然后在cftool中“btc[1] + tt”
# y中心距离加了tt,意思就是向下移动一点,这样可以命中头部了就
btc[1] = int(TOP + btc[1] - SCREEN_CY) - int(btp[3] / 2)
if btp[2] < 8:
return None, None
return btc, btp
return None, None
How can I move the mouse to that position like the code below:(move with relative position)
# 截图返回
import threading
import time
import warnings
import win32api
import win32con
from FpsDetect import ScreenShout, Detector, FindBestCenter
LAST_TIME = time.time()
tempX_val = 0
def clickLeft():
global LAST_TIME
LAST_TIME = time.time()
win32api.mouse_event(win32con.MOUSEEVENTF_LEFTDOWN, 0, 0) # The left button is down.
win32api.mouse_event(win32con.MOUSEEVENTF_LEFTUP, 0, 0) # The left button is up.
def work():
global LAST_TIME
global tempX_val
det = Detector(model_path= b"./cfModel.engine", dll_path= "./yolov5.dll") # b'' is needed
while True:
img = ScreenShout() # Capture an image of the area to be examined in the game
# Output class, confidence, aim position
# for example: [{'class': 0, 'conf': 0.89293504, 'position': [60.0, 109.0, 82.0, 119.0]}]
detections = det.predict(img)
if detections is not None:
btc, btp = FindBestCenter(detections) # Get Optimum shooting coordinates.
print(detections)
if btc is not None:
print("The move distance is(btp) :", btp, "The target position coordinates is(btc):", btc)
tt = 0
if btp[2] < 25:
tt = 4
else:
tt = 5
win32api.mouse_event(win32con.MOUSEEVENTF_MOVE, int(btc[0]), btc[1] + tt, 0, 0)
if 8 > btc[0] > -8 and 12 > btc[1]+tt > -12:
print("时间", time.time() - LAST_TIME)
if time.time() - LAST_TIME > 0.1:
threading.Thread(target=clickLeft, args=()).start()
if __name__ == '__main__':
warnings.filterwarnings("ignore")
# 开始截图线程
a1 = threading.Thread(target=work, args=())
a1.start()
Why use a relative position move instead of moving directly to that position?
因为在某些场景下,直接鼠标位置移动是实现不了的,只能使用如下相对位置鼠标移动:
win32api.mouse_event(win32con.MOUSEEVENTF_MOVE, int(btc[0]), btc[1] + tt, 0, 0)其中tt的含义看第一段代码,其中有解释.