在控制系统应用中,纯滞后环节往往是影响系统动态特性的不利因素。工业过程中如钢铁,热工和化工过程中往往会有纯滞后(大延迟)环节。对这类系统,控制器如果设计不当,常常会引起系统的超调和持续振荡。 由于纯延迟的存在,使被控量对干扰、控制信号不能即时的反映。即使调节机构接受控制信号后立即动作,也要经过纯延时间(theta)后才到达被控量,使得系统产生较大的超调量和较长的调节时间。
系统对这类具有纯滞后环节的控制要求,快速性往往是次要的,通常要求系统稳定(稳定第一),要求系统的超调量要小,调整时间允许在较长的采样周期内结束。这样的一种大时间滞后系统采用PID控制或采用最少拍控制,控制效果往往不好。这里我们利用一种直接数字控制器设计方法:大林算法。(由IBM公司的Dahlin最早提出),算法本身的计算公式非常简单,但是参数的确定比较困难。下面给大家一一分析。限于本人水平文中的错误和不足之处在所难免,热忱欢迎大家批评指正。同时感谢大家点赞 +订阅。
1、大林算法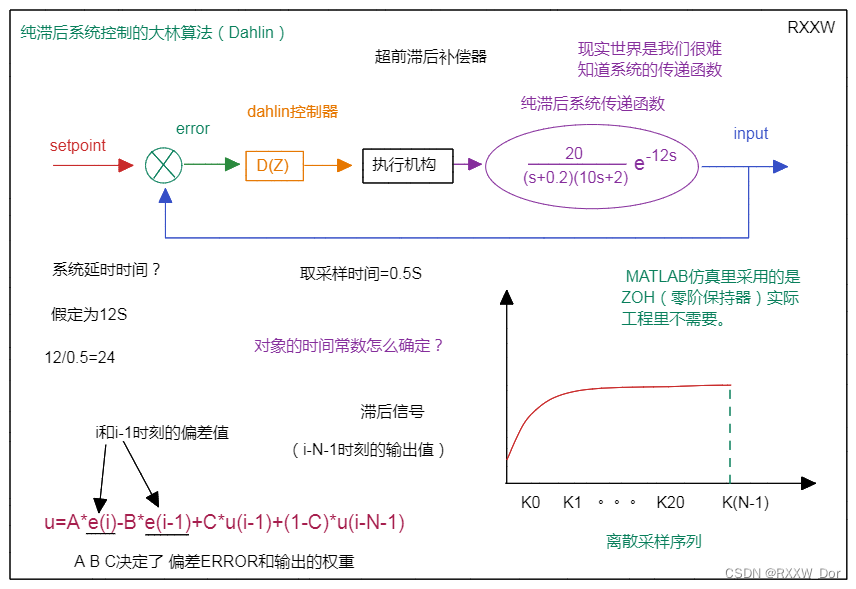
下面讲下具体的实现步骤(这里非常关键,MATLAB仿真确定不了系统特性参数):
1、其实系统的动态特性测取和参数整定是最难的,不然很难达到良好的控制效果。 我们对被控对象的动态特性的测取采用施加阶跃法 。 当受控对象