前言:
1.官方文档里面有很多的实例和参数的说明
2.图形化操作之后可以自动生成代码
3.注意在程序里面要关掉打开的文件 fclose
内容提要
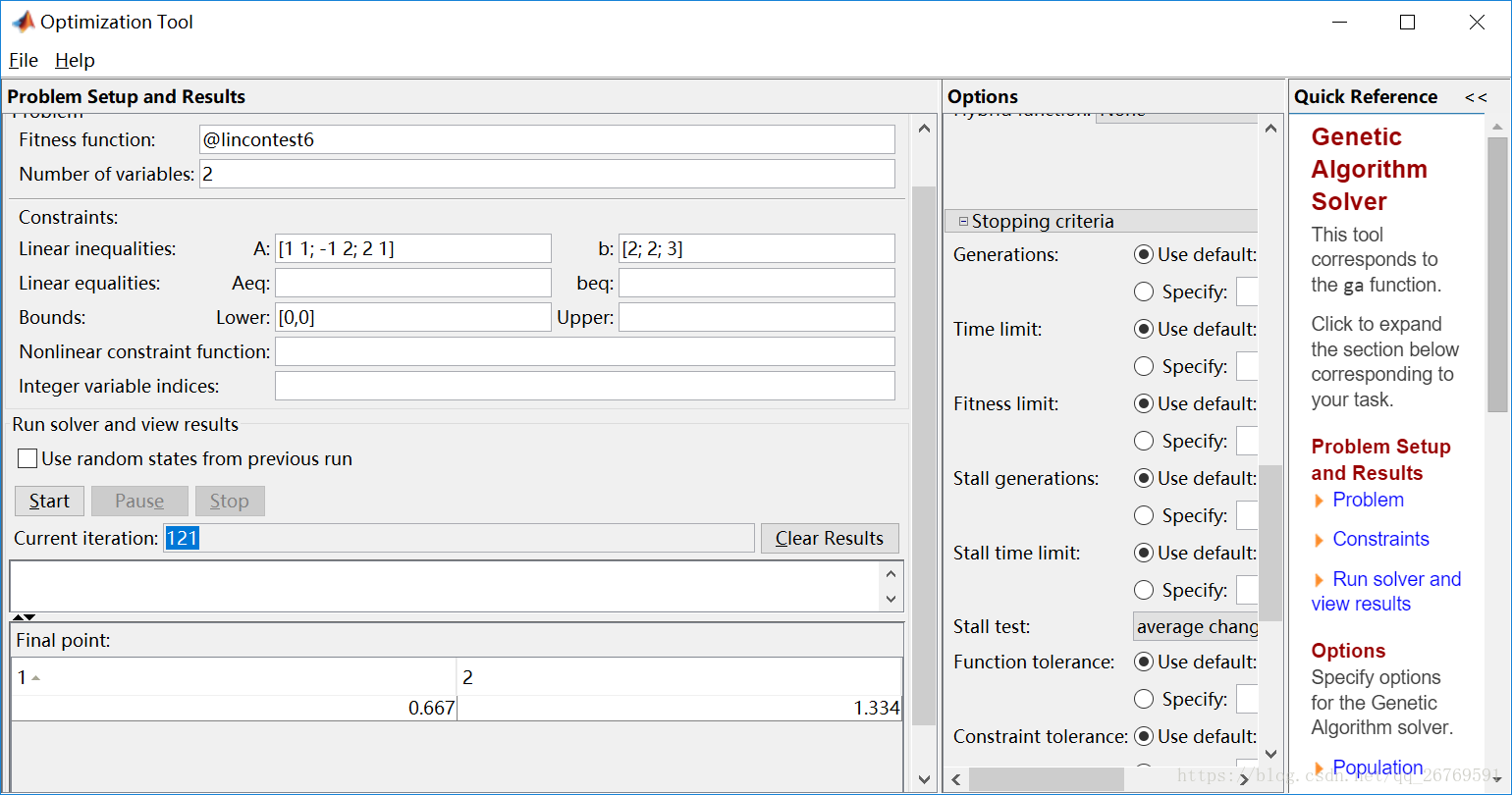
启用:

遗传算法:
在ga.m的文档中其实有很多例子
1.
A = [1 1; -1 2; 2 1]; b = [2; 2; 3]; lb = zeros(2,1);
% % Use mutation function which can handle constraints
options = optimoptions('ga','MutationFcn',@mutationadaptfeasible);
[x,fval,exitflag] = ga(@lincontest6,2,A,b,[],[],lb,[],[],options);2.
fun = @(x) (x(1) - 0.2)^2 + (x(2) - 1.7)^2 + (x(3) -5.1)^2;
x = ga(fun,3,[],[],[],[],[],[],[],[2 3])
3.匿名函数
x = ga(@(x) 3*sin(x(1))+exp(x(2)),2) 4.官方文档
function [x,fval,exitFlag,output,population,scores] = ga(fun,nvars,Aineq,bineq,Aeq,beq,lb,ub,nonlcon,intcon,options)
function [解,适应度值,退出标志,输出,种群大小,得分]=ga(函数,解的维数,不等式的系数A,不等式的系数b,等式的系数A,等式的系数b)
%GA Constrained optimization using genetic algorithm.
% GA attempts to solve problems of the following forms:
% min F(X) subject to: A*X <= B, Aeq*X = Beq (linear constraints)
% X C(X) <= 0, Ceq(X) = 0 (nonlinear constraints)
% LB <= X <= UB
% X(i) integer, where i is in the index
% vector INTCON (integer constraints)
%
% Note: If INTCON is not empty, then no equality constraints are allowed.
% That is:-
% * Aeq and Beq must be empty
% * Ceq returned from NONLCON must be empty
%
% X = GA(FITNESSFCN,NVARS) finds a local unconstrained minimum X to the
% FITNESSFCN using GA. NVARS is the dimension (number of design
% variables) of the FITNESSFCN. FITNESSFCN accepts a vector X of size
% 1-by-NVARS, and returns a scalar evaluated at X.
%
% X = GA(FITNESSFCN,NVARS,A,b) finds a local minimum X to the function
% FITNESSFCN, subject to the linear inequalities A*X <= B. Linear
% constraints are not satisfied when the PopulationType option is set to
% 'bitString' or 'custom'. See the documentation for details.
%
% X = GA(FITNESSFCN,NVARS,A,b,Aeq,beq) finds a local minimum X to the
% function FITNESSFCN, subject to the linear equalities Aeq*X = beq as
% well as A*X <= B. (Set A=[] and B=[] if no inequalities exist.) Linear
% constraints are not satisfied when the PopulationType option is set to
% 'bitString' or 'custom'. See the documentation for details.
%
% X = GA(FITNESSFCN,NVARS,A,b,Aeq,beq,lb,ub) defines a set of lower and
% upper bounds on the design variables, X, so that a solution is found in
% the range lb <= X <= ub. Use empty matrices for lb and ub if no bounds
% exist. Set lb(i) = -Inf if X(i) is unbounded below; set ub(i) = Inf if
% X(i) is unbounded above. Linear constraints are not satisfied when the
% PopulationType option is set to 'bitString' or 'custom'. See the
% documentation for details.
%
% X = GA(FITNESSFCN,NVARS,A,b,Aeq,beq,lb,ub,NONLCON) subjects the
% minimization to the constraints defined in NONLCON. The function
% NONLCON accepts X and returns the vectors C and Ceq, representing the
% nonlinear inequalities and equalities respectively. GA minimizes
% FITNESSFCN such that C(X)<=0 and Ceq(X)=0. (Set lb=[] and/or ub=[] if
% no bounds exist.) Nonlinear constraints are not satisfied when the
% PopulationType option is set to 'bitString' or 'custom'. See the
% documentation for details.
%
% X = GA(FITNESSFCN,NVARS,A,b,Aeq,beq,lb,ub,NONLCON,options) minimizes
% with the default optimization parameters replaced by values in OPTIONS.
% OPTIONS can be created with the OPTIMOPTIONS function. See OPTIMOPTIONS
% for details. For a list of options accepted by GA refer to the
% documentation.
%
% X = GA(FITNESSFCN,NVARS,A,b,[],[],lb,ub,NONLCON,INTCON) requires that
% the variables listed in INTCON take integer values. Note that GA does
% not solve problems with integer and equality constraints. Pass empty
% matrices for the Aeq and beq inputs if INTCON is not empty.
%
% X = GA(FITNESSFCN,NVARS,A,b,[],[],lb,ub,NONLCON,INTCON,options)
% minimizes with integer constraints and the default optimization
% parameters replaced by values in OPTIONS. OPTIONS can be created with
% the OPTIMOPTIONS function. See OPTIMOPTIONS for details.
%
% X = GA(PROBLEM) finds the minimum for PROBLEM. PROBLEM is a structure
% that has the following fields:
% fitnessfcn: <Fitness function>
% nvars: <Number of design variables>
% Aineq: <A matrix for inequality constraints>
% bineq: <b vector for inequality constraints>
% Aeq: <Aeq matrix for equality constraints>
% beq: <beq vector for equality constraints>
% lb: <Lower bound on X>
% ub: <Upper bound on X>
% nonlcon: <Nonlinear constraint function>
% intcon: <Index vector for integer variables>
% options: <Options created with optimoptions('ga',...)>
% rngstate: <State of the random number generator>
%
% [X,FVAL] = GA(FITNESSFCN, ...) returns FVAL, the value of the fitness
% function FITNESSFCN at the solution X.
%
% [X,FVAL,EXITFLAG] = GA(FITNESSFCN, ...) returns EXITFLAG which
% describes the exit condition of GA. Possible values of EXITFLAG and the
% corresponding exit conditions are
%
% 1 Average change in value of the fitness function over
% options.MaxStallGenerations generations less than
% options.FunctionTolerance and constraint violation less than
% options.ConstraintTolerance.
% 3 The value of the fitness function did not change in
% options.MaxStallGenerations generations and constraint violation
% less than options.ConstraintTolerance.
% 4 Magnitude of step smaller than machine precision and constraint
% violation less than options.ConstraintTolerance. This exit
% condition applies only to nonlinear constraints.
% 5 Fitness limit reached and constraint violation less than
% options.ConstraintTolerance.
% 0 Maximum number of generations exceeded.
% -1 Optimization terminated by the output or plot function.
% -2 No feasible point found.
% -4 Stall time limit exceeded.
% -5 Time limit exceeded.
%
% [X,FVAL,EXITFLAG,OUTPUT] = GA(FITNESSFCN, ...) returns a
% structure OUTPUT with the following information:
% rngstate: <State of the random number generator before GA started>
% generations: <Total generations, excluding HybridFcn iterations>
% funccount: <Total function evaluations>
% maxconstraint: <Maximum constraint violation>, if any
% message: <GA termination message>
%
% [X,FVAL,EXITFLAG,OUTPUT,POPULATION] = GA(FITNESSFCN, ...) returns the
% final POPULATION at termination.
%
% [X,FVAL,EXITFLAG,OUTPUT,POPULATION,SCORES] = GA(FITNESSFCN, ...) returns
% the SCORES of the final POPULATION.
%
%
% Example:
% Unconstrained minimization of 'rastriginsfcn' fitness function of
% numberOfVariables = 2
% x = ga(@rastriginsfcn,2)
%
% Display plotting functions while GA minimizes
% options = optimoptions('ga','PlotFcn',...
% {@gaplotbestf,@gaplotbestindiv,@gaplotexpectation,@gaplotstopping});
% [x,fval,exitflag,output] = ga(@rastriginsfcn,2,[],[],[],[],[],[],[],options)
%
% An example with inequality constraints and lower bounds
% A = [1 1; -1 2; 2 1]; b = [2; 2; 3]; lb = zeros(2,1);
% % Use mutation function which can handle constraints
% options = optimoptions('ga','MutationFcn',@mutationadaptfeasible);
% [x,fval,exitflag] = ga(@lincontest6,2,A,b,[],[],lb,[],[],options);
%
% FITNESSFCN can also be an anonymous function:
% x = ga(@(x) 3*sin(x(1))+exp(x(2)),2)
%
% If FITNESSFCN or NONLCON are parameterized, you can use anonymous
% functions to capture the problem-dependent parameters. Suppose you want
% to minimize the fitness given in the function myfit, subject to the
% nonlinear constraint myconstr, where these two functions are
% parameterized by their second argument a1 and a2, respectively. Here
% myfit and myconstr are MATLAB file functions such as
%
% function f = myfit(x,a1)
% f = exp(x(1))*(4*x(1)^2 + 2*x(2)^2 + 4*x(1)*x(2) + 2*x(2) + a1);
%
% and
%
% function [c,ceq] = myconstr(x,a2)
% c = [1.5 + x(1)*x(2) - x(1) - x(2);
% -x(1)*x(2) - a2];
% % No nonlinear equality constraints:
% ceq = [];
%
% To optimize for specific values of a1 and a2, first assign the values
% to these two parameters. Then create two one-argument anonymous
% functions that capture the values of a1 and a2, and call myfit and
% myconstr with two arguments. Finally, pass these anonymous functions to
% GA:
%
% a1 = 1; a2 = 10; % define parameters first
% % Mutation function for constrained minimization
% options = optimoptions('ga','MutationFcn',@mutationadaptfeasible);
% x = ga(@(x)myfit(x,a1),2,[],[],[],[],[],[],@(x)myconstr(x,a2),options)
%
% Example: Solving a mixed-integer optimization problem
% An example of optimizing a function where a subset of the variables are
% required to be integers:
%
% % Define the objective and call GA. Here variables x(2) and x(3) will
% % be integer.
% fun = @(x) (x(1) - 0.2)^2 + (x(2) - 1.7)^2 + (x(3) -5.1)^2;
% x = ga(fun,3,[],[],[],[],[],[],[],[2 3])
%
% See also OPTIMOPTIONS, FITNESSFUNCTION, GAOUTPUTFCNTEMPLATE, PATTERNSEARCH, @.
% Copyright 2003-2015 The MathWorks, Inc.
% If the first arg is not a gaoptimset, then it's a fitness function followed by a genome
% length. Here we make a gaoptimset from the args.
遗传算法的调用方式和参数的说明
可以这样查看默认参数的值
A = [1 1; -1 2; 2 1];
b = [2; 2; 3]; lb = zeros(2,1);
[x,fval,exitflag] = ga(@lincontest6,2,A,b,[],[],lb)
注意顺序决定传值遗传算法简单的几个测试用例
遗传算法测试用例
1.分段函数测试
%分段函数测试 ok
function y=ga_f_test(x)
y=0;
if x>1
y=y+x;
else
y=y+2*y;
end
end
2.关于解的测试,我觉得解应该只能是一维的
2.
A = [1 1; -1 2; 2 1];
b = [2; 2; 3];
lb = zeros(2,1);
[x,fval,exitflag] = ga(@lincontest6,2,A,b,[],[],lb)
%lb表示x的下界,up表示上界
Optimization terminated:
average change in the fitness value less than
options.TolFun.
x = 0.7794 1.2205
fval =-8.03916 exitflag =谈谈我使用遗传算法过程中的一些坑
1.遗传算法只能生成一维的向量做为解 所以参数栏只会让你输入一个个数
2.那些参数的意义 可以见上面的
3.遗传算法适合各各样的问题,不论你的函数里面是分段的还是提前退出的,可以使用return 但是要注意的是退出的时候最好是个一个较大的随机值,而不是一个固定的值,否则最后会认为解基本上没有变化,然后就终止掉了
if x(i)==x(j) %一旦发现重复的值 给他一个很大的值然后马上退出
distance=randi(1000)*100000 ; 4.对于这种离散的点,其实可以先给点编号,然后随机生成1-6之间的数,再根据序号进行读值,这样可提高效率,保证有解
5.如何控制不生成重复的解目前还只能通过自己的程序进行控制
%控制一下不能有重复的值
for i=1:Number_of_trash
for j=i+1:Number_of_trash
if x(i)==x(j) %一旦发现重复的值 给他一个很大的值然后马上退出
distance=randi(1000)*100000 ;
return ;
end
end
end
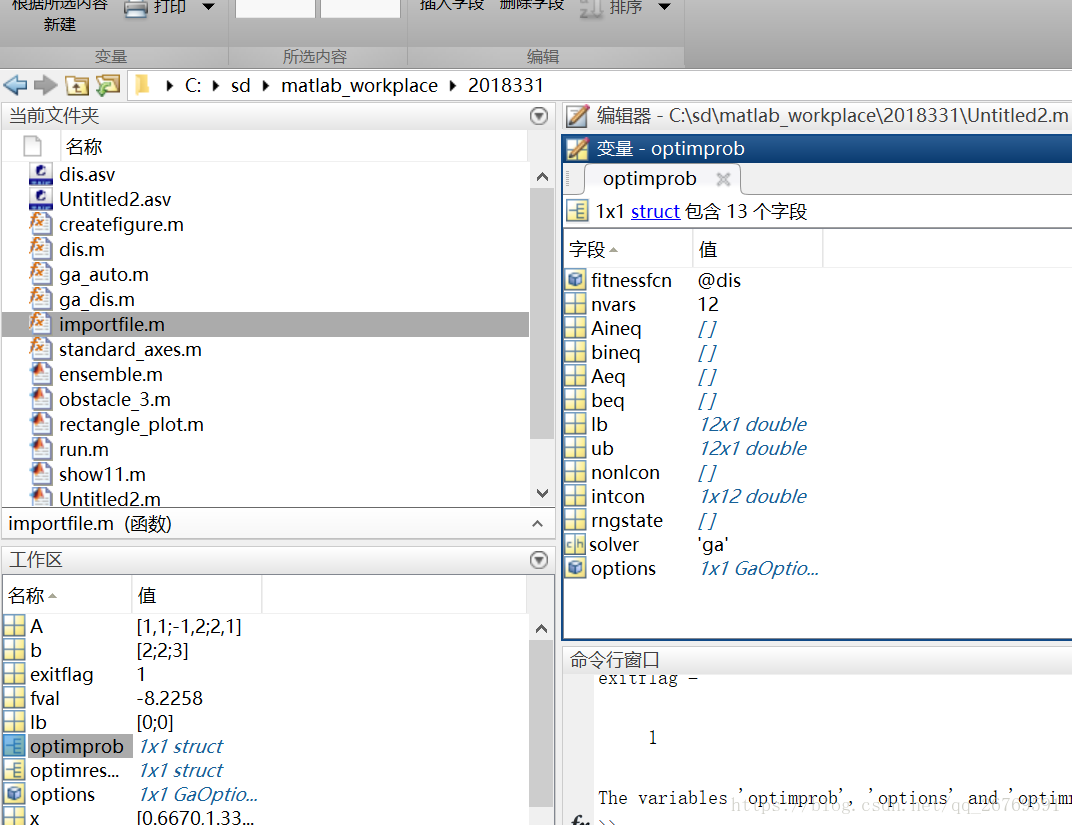
最后贴上自己的完整的代码
dis2
function distance=dis2(x)
%准备数据
%x=[1 2 3 4 5 6];
input = importfile('input.txt');
Num_of_obstacle=input{3:3,{'VarName1'}};
trash=zeros(1,3);
Number_of_trash=input{3+Num_of_obstacle+1:3+Num_of_obstacle+1,{'VarName1'}};
for i=1:Number_of_trash
trash_temp=input{3+Num_of_obstacle+1+i:3+Num_of_obstacle+1+i,{'VarName1','VarName2','VarName3'}};
trash(:,:,i)= trash_temp;
w(i)=trash_temp(1,3);
end
%把垃圾读进来
robot=input{2:2,{'VarName1','VarName2','VarName3','VarName4'}};
garbage=input{3+Num_of_obstacle+Number_of_trash+2:3+Num_of_obstacle+Number_of_trash+2,{'VarName1','VarName2'}};
w_temp=0;
weight=5;
distance=0;
%控制一下不能有重复的值
for i=1:Number_of_trash
for j=i+1:Number_of_trash
if x(i)==x(j) %一旦发现重复的值 给他一个很大的值然后马上退出
distance=randi(1000)*100000 ;
return ;
end
end
end
for i=1:Number_of_trash
%每到达一个点 首先计算距离和权重
w_temp=w_temp+ trash(1,3,x(i));
%若没有超重
if w_temp<weight
if i==1
distance=abs(trash(1,1,x(i))-robot(1,1))+abs(trash(1,2,x(i))-robot(1,2))+distance;
else if i==Number_of_trash
distance=abs(trash(1,1,x(i))-garbage(1,1))+abs(trash(1,2,x(i))-garbage(1,2))+distance;
else if i<Number_of_trash&&i>1
distance=distance+abs(trash(1,1,x(i))-trash(1,2,x(i-1)))+abs(trash(1,1,x(i))-trash(1,1,x(i-1)));
end %i<Number_of_trash&&i>1
end %i==Number_of_trash
end %i==1
else %若是超重
%先把之前的放下,只计算当前一个的重量
w_temp=0;
w_temp=w_temp+ trash(1,3,x(i));
%这里默认第一个永远都不是超重的 所以就不会陷入死循环
%距离=到达的距离+扔垃圾的距离
if i>1
distance=abs(trash(1,1,x(i-1))-garbage(1,1))+abs(trash(1,2,x(i))-garbage(1,2))+abs(trash(1,1,x(i))-garbage(1,1))+abs(trash(1,2,x(i))-garbage(1,2))+distance;
else %第一个垃圾就大于 weight 直接退出 一般情况下这是不可能存在的
distance=inf;
return
end
end
end
ga_dis2
function [x,fval,exitflag,output,population,score] = ga_dis2()
%% This is an auto generated MATLAB file from Optimization Tool.
nvars=6;
lb=[1 1 1 1 1 1];
ub=[6 6 6 6 6 6];
intcon=[1 2 3 4 5 6];
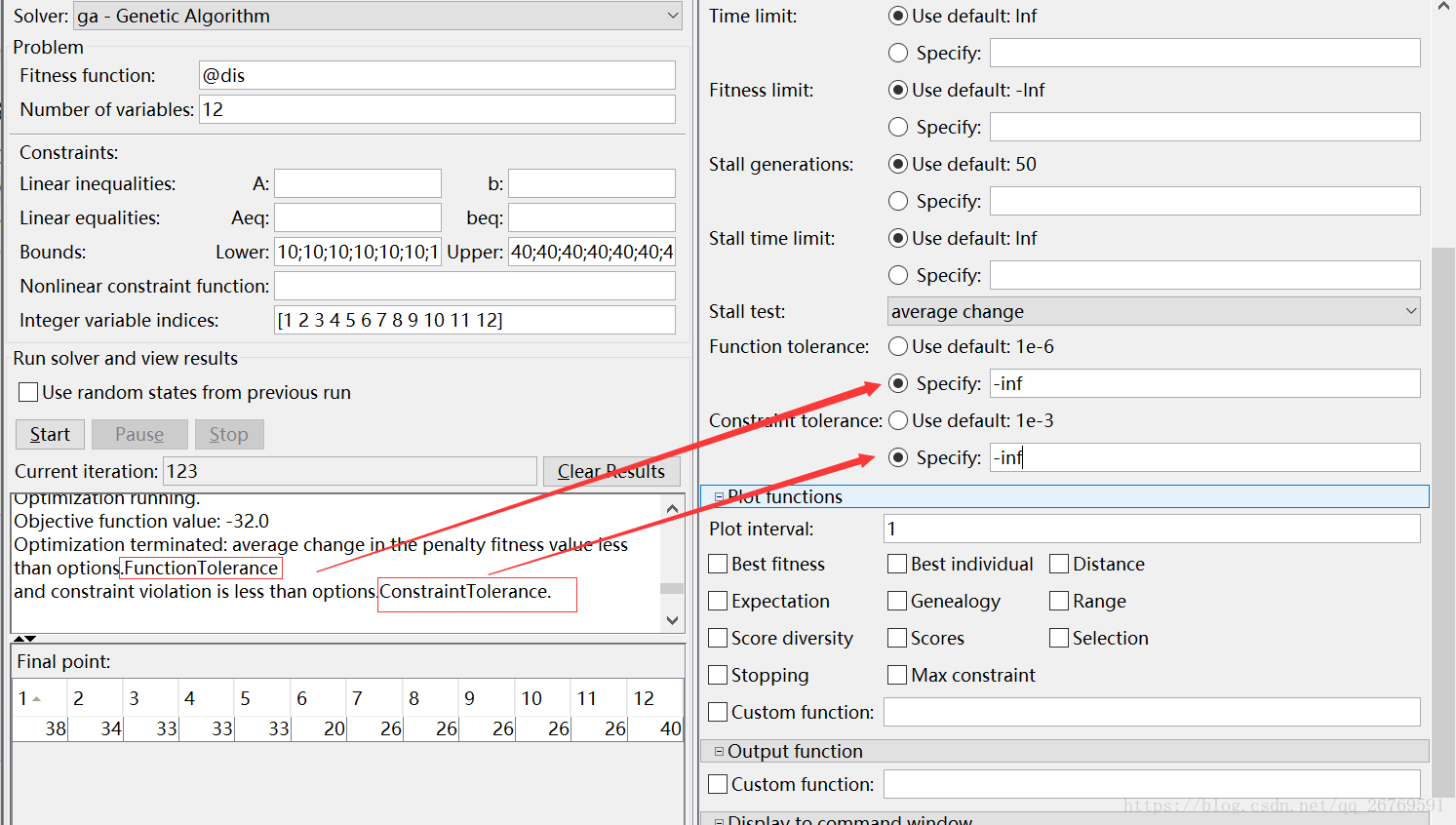
FunctionTolerance_Data=1e-6;
ConstraintTolerance_Data=1e-3;
%% Start with the default options
options = optimoptions('ga');
%% Modify options setting
options = optimoptions(options,'FunctionTolerance', FunctionTolerance_Data);
options = optimoptions(options,'ConstraintTolerance', ConstraintTolerance_Data);
options = optimoptions(options,'Display', 'off');
[x,fval,exitflag,output,population,score] = ...
ga(@dis2,nvars,[],[],[],[],lb,ub,[],intcon,options);