如何用vrep进行UR5e机械臂末端沿着已知路径进行运动仿真?如何设置机械臂逆运动学?
目录
10.点击运行按钮开始仿真,点击平移按钮拖动target检验逆运动学
参考连接
1.添加dummy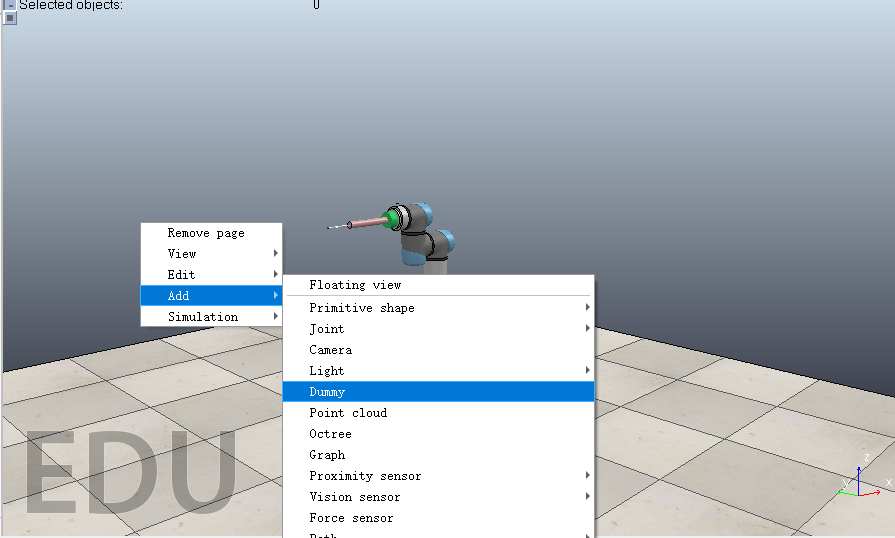
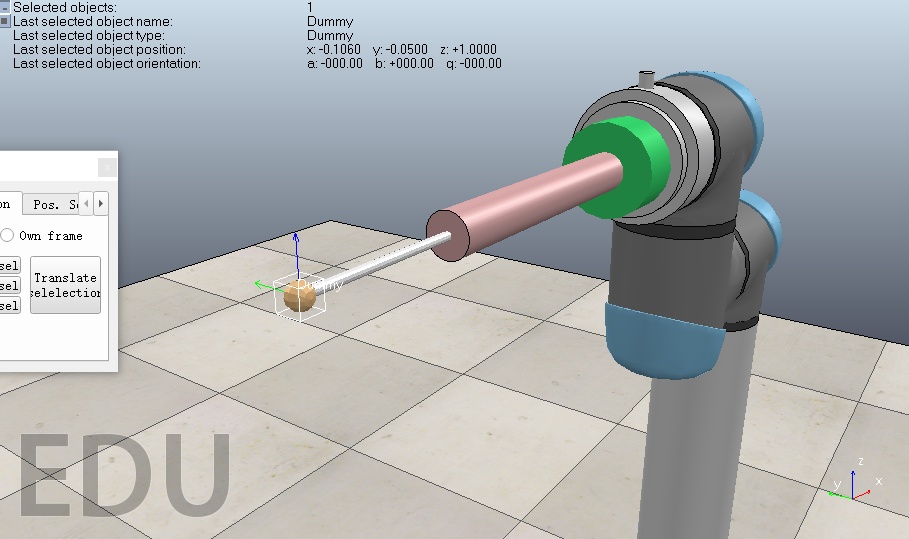
2.将dummy移动到想要规划路径的末端点
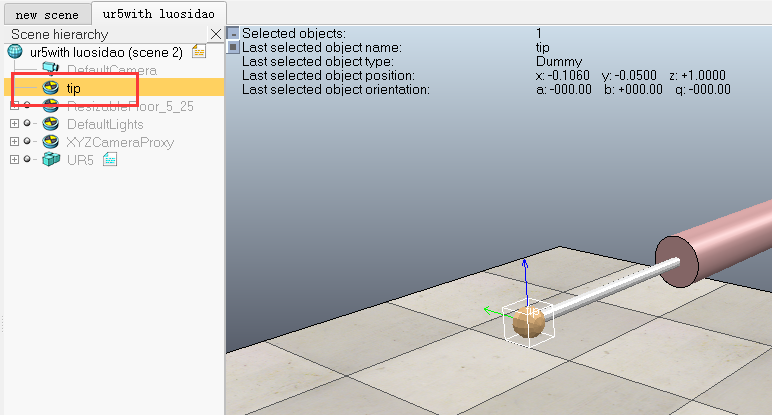
3.将dummy改名为tip
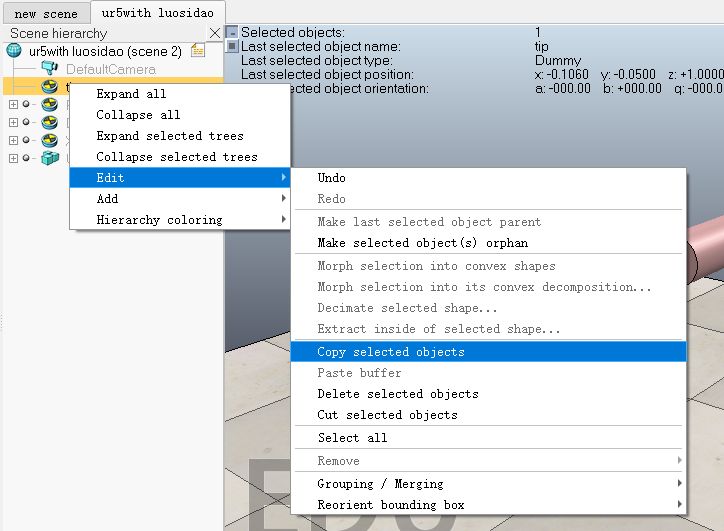
4.复制一个dummy
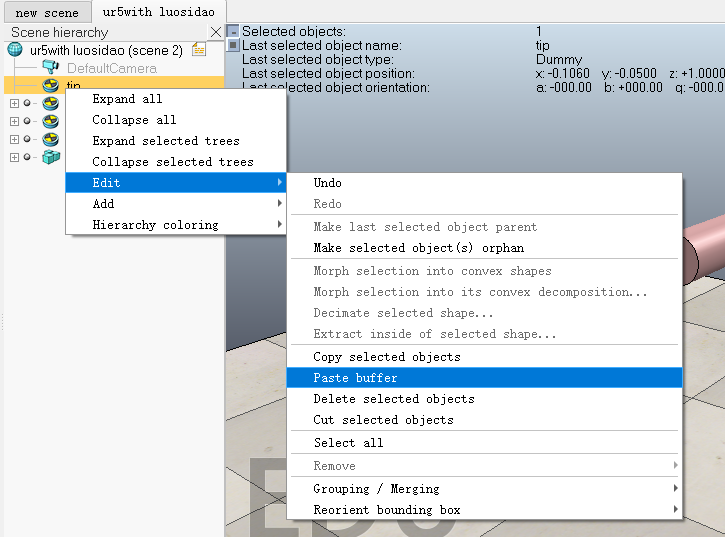
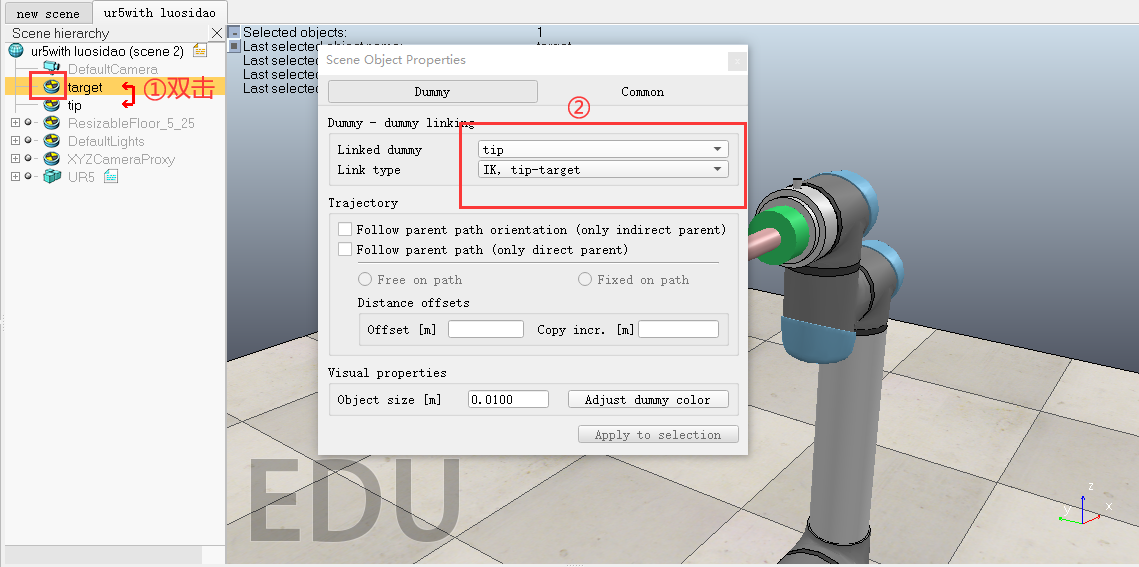
5.将复制的dummy改为target

6.连接两个dummy
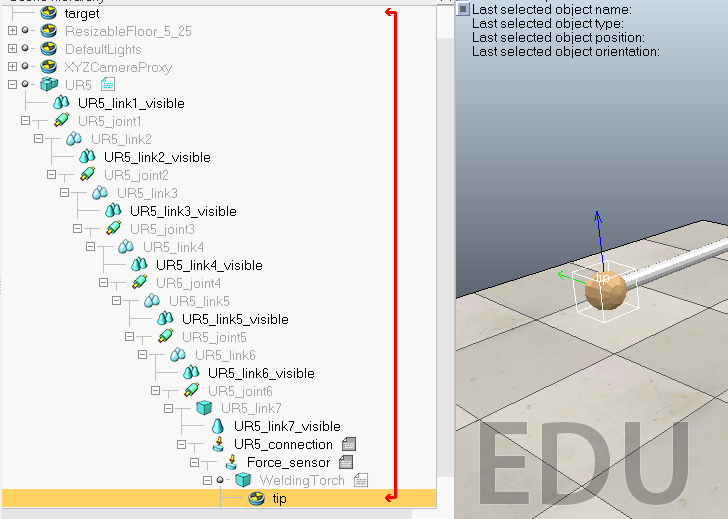
 7.将tip拖到机械臂末端关系中(就是想要移动的末端)
7.将tip拖到机械臂末端关系中(就是想要移动的末端)
8.设置逆运动学


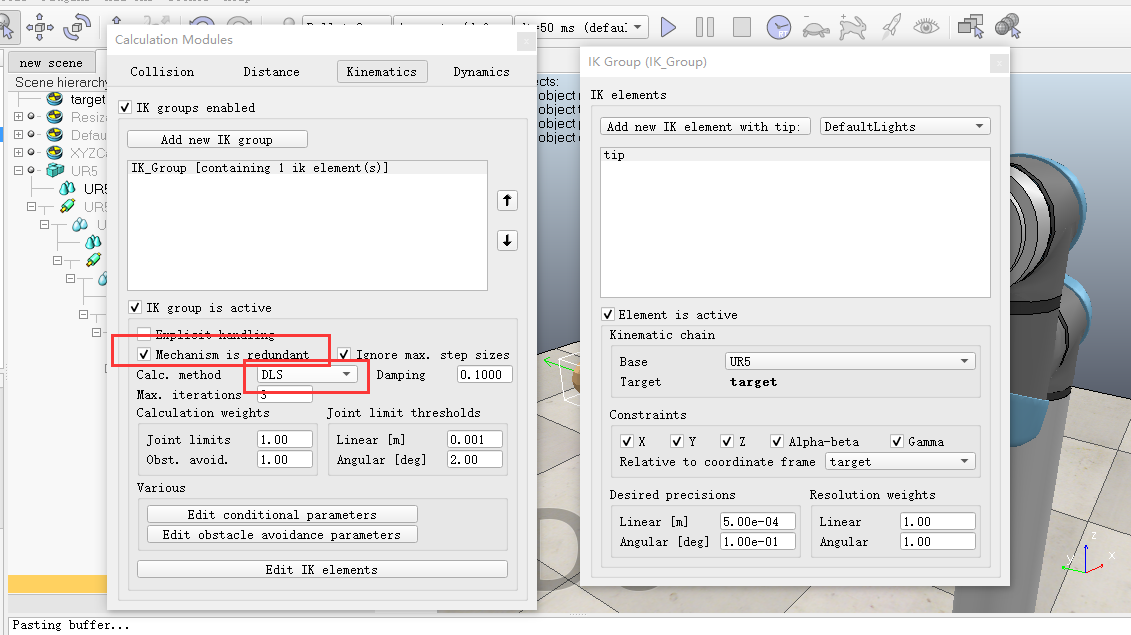
9.将每个关节设置改为下图所示:

10.点击运行按钮开始仿真,点击平移按钮拖动target检验逆运动学
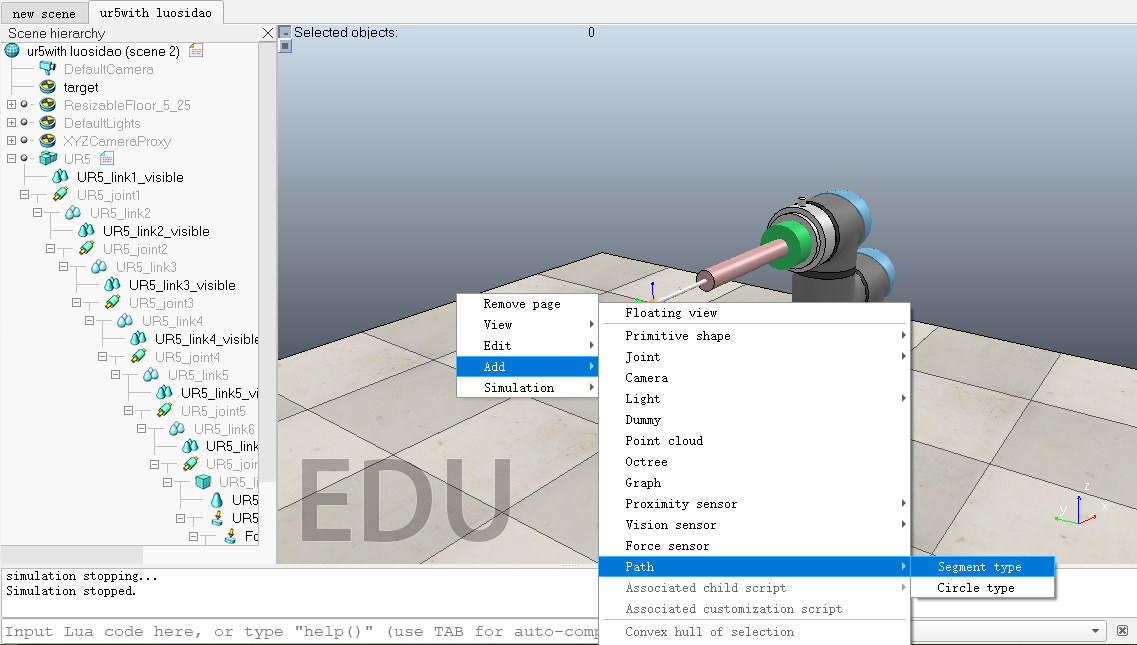
11.使机械臂末端沿着路径运动
添加路径path
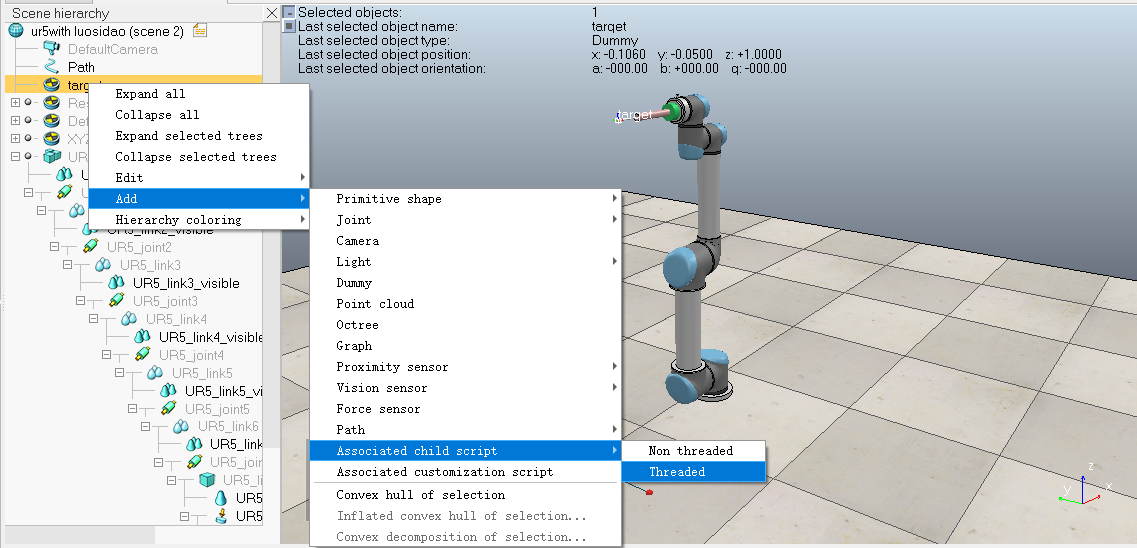
在target上添加代码
双击代码,输入如下代码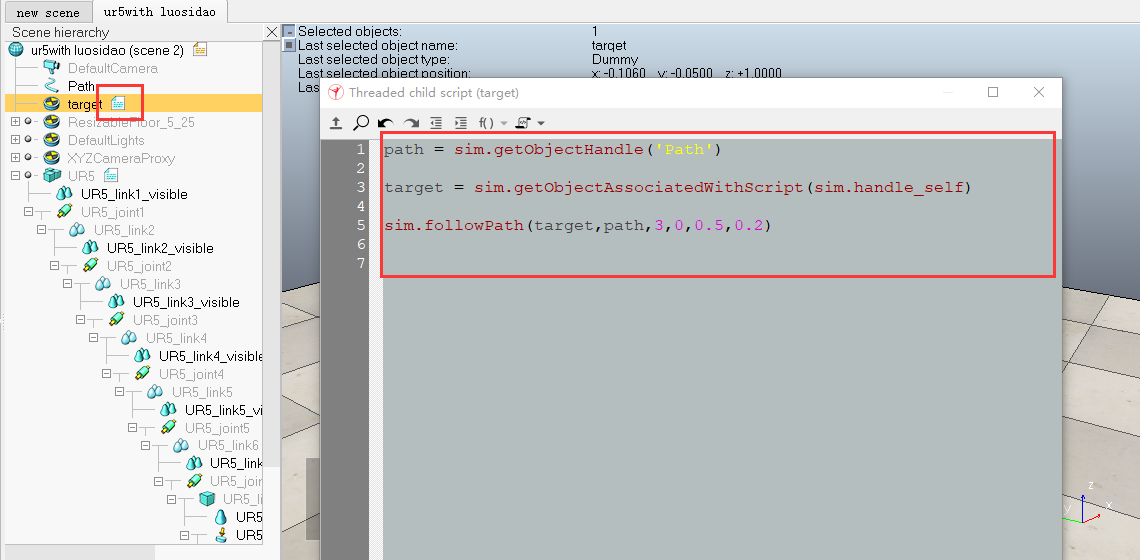
path = sim.getObjectHandle('Path')
target = sim.getObjectAssociatedWithScript(sim.handle_self)
sim.followPath(target,path,3,0,0.5,0.2)