ENVI包括了ISODATA和K-Mean两种非监督分类方法。
ISODATA(Iterative Self-Orgnizing Data Analysize Technique)是一种重复自组织数据分析技术,计算数据空间中均匀分布的类均值,然后用最小距离技术将剩余像元进行迭代聚合,每次迭代都重新计算均值,且根据所得的新均值,对像元进行再分类。
K-Means使用聚类分析方法,随机地查找聚类簇的聚类相似度相近,即中心位置,是利用各聚类中对象的均值所获得一个“中心对象”(引力中心)来进行计算的,然后迭代地重新配置他们,完成分类过程。
非监督分类总体上一般可分为4个过程:执行非监督分类、类别定义、合并子类和评价分类结果。
1
1)执行非监督分类
下面以TM图像为例介绍非监督分类操作过程。
由于ISODATA和K-Mean参数设置不同,就两种分类方法分别介绍。
-
ISODATA
在Toolbox工具箱中,双击Classification/Unsupervised Classification/IsoData Classification工具,在Classification Input File对话框中,选择分类的TM图像文件,单击OK按钮,打开ISODATA Parameters对话框,下面设置ISODATA Parameters对话框中的参数。

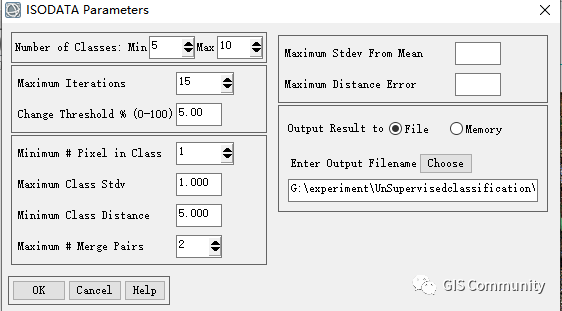
(1)类别数量范围(Number of Classes:Min,Max):一般输入最小数量不能小于最终分类数量,最大数量为最终分类数量的2~3倍。Min:5,Max:15。
(2)最大迭代次数(Maximum Iterations):15.迭代次数越大,得到的结果越精确,运算时间也越长。
(3)变换阈值(Change Threshold):5.当每一类的变化像元数小于阈值时,结束迭代过程。这个值越小,得到的结果越精确,运算量也越大。
(4)Minimun#Pixel in Class:键入形成一类所需的最少像元数。如果某一类中的像元数小于最少像元数,该类将被删除,其中的像元被归并到距离最近的类中。
(5)最大分类标准差(Maximum Class Stdv):1.以像素值为单位,如果某一类的标准差比该阈值大,该类将被拆分成两类。
(6)类别均值之间的最小距离(Minimum Class Distance):5.以像素值为单位,如果类均值之间的距离小于输入的最小值,则类别将被合并。
(7)合并类别最大值(Maximum#Merge Pairs):2。
(8)距离类别均值的最大标准差
(Maximum Stdev From Mean):为可选项。筛选小于这个标准差的像元参与分类。
(9)允许的最大距离误差(Maximum Distance Error):为可选项。筛选小于这个最大距离误差的像元参与分类。
(10)选择输出路径及文件名,单击OK按钮,执行非监督分类。

2.K-Means
在Toolbox工具箱中,双击Classification/Unsupervised Classification/K-Means Classifi-cation工具,在Classification Input File对话框中,选择分类的TM图像文件,单击OK;打开K-Means Parameters对话框,下面设置K-Means Parameters对话框中的参数。

(1)分类数量(Number of Classes):15.一般为输出最终分类数量的2~3倍。
(2)最大迭代次数(Maximum Iterations):10。
迭代次数越大,得到的结果越精确,运算时间也越长。
(3)距离类别均值的最大标准差Maximum Stdev From Mean):为可选项。筛选小于这个标准差的像元参与分类。
(4)允许的最大距离误差(Maximum Distance Eror):为可选项。筛选小于这个最大距离误差的像元参与分类。
(5)选择输出路径及文件名,单击OK按钮,执行非监督分类。

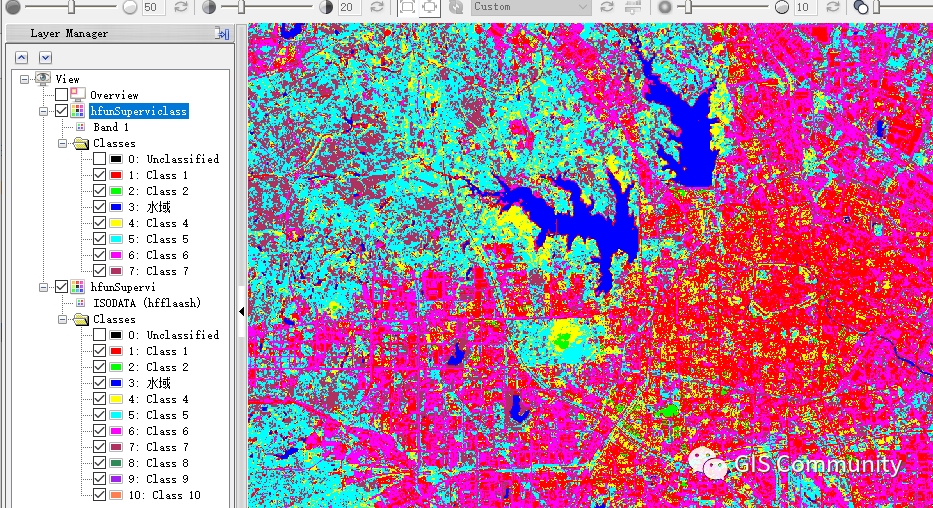
非监督分类结果:

背景值可以通过裁剪去除;

执行非监督分类之后,获得了一个初步的分类结果,需要进行类别定义和合并子类的操作。
第一步类别定义
类别定义的根据可以通过更高分辨率图像上目视解译获得,也可以是基于野外实地调查数据。
(1)打开目视解译底图并在视窗中显示(如果有)。
(2)打开TM非监督分类结果图像并在视窗口中显示。
(3)在图层管理器(Layer Manager)中,在Classes上右键选择Hide All Classes菜单,之后勾选Classl,只显示一个分类类别,通过目视判别该类的名称。

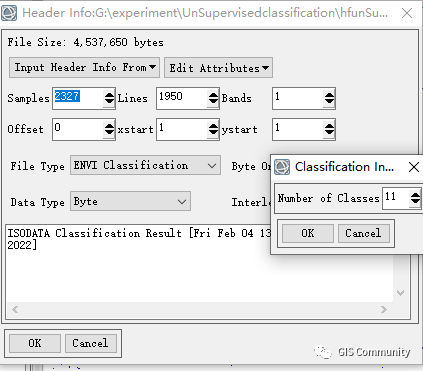
(4)在Toolbox工具箱中,双击Raster Management/Edit ENVI Header工具,在文件输入对话框中选择TM非监督分类结果。

(5)在Header Info面板中,选择Edit Attributes-→Classification Info,按照默认单击OK按钮,打开Class Color Map Editing面板。
(6)在Class Color Map Editing面板中,选择对应的类别,在Class Name中输入重新定义的类别名称,同时修改显示颜色。

(7)重复(3)~(6)步骤,定义其他类别。
提示:由于NVI5.1版本中每次修改图像头文件信息后自动关闭图像,因此最好在步骤(3)中把所有的分类都判读后,在Class Color Map Editing面板中修改分类名称和颜色。
第二步合并子类
在选择非监督分类类别数量时候,一般选择最终结果数量的2~3倍,因此在定义类别之后,需要将相同类别合并。
(1)在Toolbox工具箱中,双击Classification/Post Classification/Combine Classes工具。
在Combine Classes Input File对话框中,选择定义好的分类结果,单击OK按钮,打开Combine Classes Parameters面板。

(2)在Combine Classes Parameters面板中,从Select Input Class中选择合并的类别,从Selecct Out Class中选择并人的类别,单击Add Combination按钮添加到合并方案中。合并方案显示在Combined Classes列表中,在Combined Classes列表中单击其中一项,可以从方案中移除。

(3)合并方案确立之后,单击OK按钮,打开Combine Classes Output对话框,在Re-move Empty Classes项中选择“Yes”,将空白类移除。

(4)选择输出合并结果路径及文件名,单击OK按钮,执行合并。
评价分类结果的过程与监督分类的方法一样,可参考前面监督分类评价的内容,这里不再赘述。