主要介绍ROS中cv_bridge的使用。
在ROS中,当一个节点订阅到图像话题时,里面包含了我们所需要处理的图像信息,但是处理图像信息,在ROS中我们都是在opencv来进行的,这个时候如何将节点订阅到的图像信息发送到opencv呢?这当然就得提及到 cv_bridge 啦~~
下面是使用图片进行理解: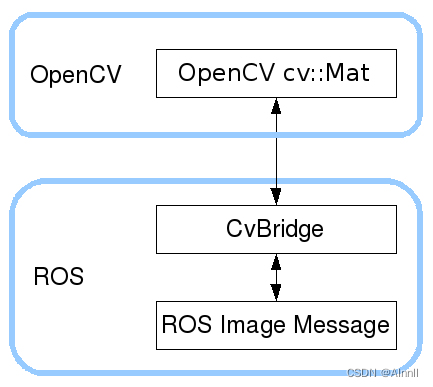
然后关于代码的说明,在代码里面基本上都进行了记录
#include <ros/ros.h>
#include <image_transport/image_transport.h>
#include <cv_bridge/cv_bridge.h>
#include <sensor_msgs/image_encodings.h>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
static const std::string OPENCV_WINDOW = "Image window"; // 静态常量 存储在全局区
class ImageConverter
{
// 下面四行 属于 private 属性,只能使用类内函数进行访问(封装)
ros::NodeHandle nh_;
image_transport::ImageTransport it_;
image_transport::Subscriber image_sub_;
image_transport::Publisher image_pub_;
public:
ImageConverter(): it_(nh_) // 构造函数用于对类成员进行初始化操作,使用 初始化列表;
{
// Subscrive to input video feed and publish output video feed
// image_sub_ = it_.subscribe("/camera/image_raw", 1,&ImageConverter::imageCb, this);
// “/probot_anno/camera/image_raw":订阅的话题
// 1:队列长度,即在消息队列中缓存几条消息
// &ImageConverter::imageCb, this:其中&ImageConverter::imageCb是回调函数,用于处理订阅到的图像信息;this指针是用于确保当前对象调用回调函数时候不会出错
image_sub_ = it_.subscribe("/probot_anno/camera/image_raw", 1,&ImageConverter::imageCb, this);
image_pub_ = it_.advertise("/image_converter/output_video", 1);
cv::namedWindow(OPENCV_WINDOW);
}
~ImageConverter() // 析构函数,对堆区 ImageConverter类 创建数据进行释放
{
cv::destroyWindow(OPENCV_WINDOW);
}
void imageCb(const sensor_msgs::ImageConstPtr& msg) // 对订阅到图像消息进行处理,并且返回给 it_.subscribe 对象
{
cv_bridge::CvImagePtr cv_ptr; // 创建 cv_ptr 对象,它属于 cv_bridge::CvImagePtr 类型
try
{
// msg:图像订阅到图像消息;
// sensor_msgs::image_encodings::BGR8:蓝色-绿色-红色顺序的彩色图像
cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8); // 使用cv_ptr 接收到图像消息
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("cv_bridge exception: %s", e.what());
return;
}
// Draw an example circle on the video stream,其实只有下面两行才是真正使用opencv处理的
if (cv_ptr->image.rows > 60 && cv_ptr->image.cols > 60)
cv::circle(cv_ptr->image, cv::Point(50, 50), 10, CV_RGB(255,0,0));
// Update GUI Window
cv::imshow(OPENCV_WINDOW, cv_ptr->image);
cv::waitKey(3);
// Output modified video stream
image_pub_.publish(cv_ptr->toImageMsg()); // 发布处理后的图像消息
}
};
int main(int argc, char** argv)
{
ros::init(argc, argv, "image_converter"); // 初始化ROS节点,节点名称:image_converter
ImageConverter ic;
ros::spin(); // 回旋函数,只要涉及到回调函数时候都需要使用
return 0;
}