PID(Proportional-Integral-Derivative)是一种常用的控制算法,广泛应用于工业控制系统中。本文将详细介绍PID算法的原理,并给出一个具体的例子和相应的C语言代码实现。

一、PID算法原理
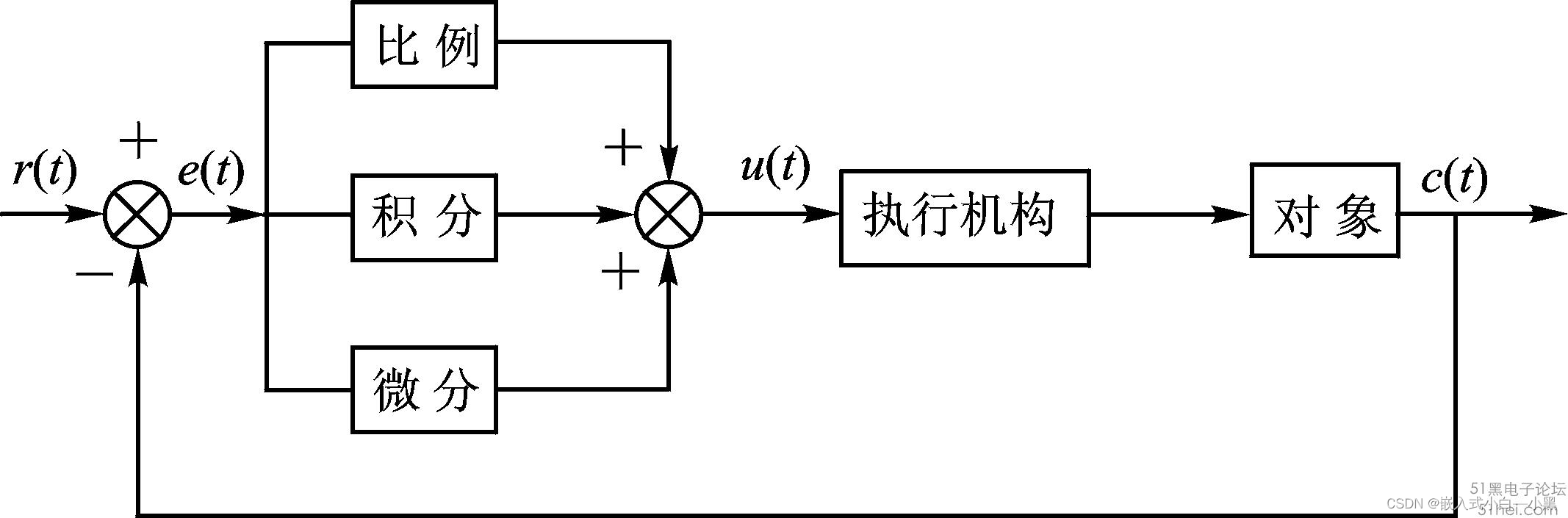
PID算法通过不断调整输出值,使得系统的实际值逐渐接近期望值。它由三个部分组成:比例(P)、积分(I)和微分(D)。
-
比例控制(P):根据误差的大小,按照一定的比例关系调整输出值。比例控制能够快速响应系统的变化,但可能引起超调和震荡。
-
积分控制(I):根据误差的累积值,按照一定的比例关系调整输出值。积分控制可以消除稳态误差,但可能导致系统响应过慢和超调。
-
微分控制(D):根据误差变化的速率,按照一定的比例关系调整输出值。微分控制可以提高系统的稳定性和响应速度,但对噪声敏感。
PID算法的输出值计算公式为:
o u t p u t = K p ∗ e r r o r + K i ∗ i n t e g r a l + K d ∗ d e r i v a t i v e output = Kp * error + Ki * integral + Kd * derivative output=Kp∗error+Ki∗integral+Kd∗derivative
其中,Kp、Ki和Kd分别是比例、积分和微分的系数,error为当前误差,integral为误差的积分值,derivative为误差的变化率。
二、PID算法实现示例
为了更好地理解PID算法的实现,我们以一个简单的温度控制系统为例。
假设我们需要将一个房间的温度控制在25摄氏度,而当前的温度为20摄氏度。我们可以使用PID算法来实现温度的控制。
2.1 初始化PID参数和变量:
float Kp = 0.5; // 比例系数
float Ki = 0.2; // 积分系数
float Kd = 0.1; // 微分系数
float setpoint = 25.0; // 期望温度
float temperature = 20.0; // 当前温度
float error = 0.0; // 误差
float integral = 0.0; // 误差累积值
float derivative = 0.0; // 误差变化率
float output = 0.0; // 输出值
2.2 计算PID输出:
while (1) {
error = setpoint - temperature; // 计算误差
integral += error; // 更新误差累积值
derivative = error - previous_error; // 计算误差变化率
output = Kp * error + Ki * integral + Kd * derivative; // 计算输出值
previous_error = error; // 保存当前误差作为上一次误差
// 根据输出值进行相应的控制操作,例如调整加热器功率或风扇转速
// 更新当前温度
// temperature = ...;
}
2.3 完整代码
#include <stdio.h>
float Kp = 0.5; // 比例系数
float Ki = 0.2; // 积分系数
float Kd = 0.1; // 微分系数
float setpoint = 25.0; // 期望温度
float temperature = 20.0; // 当前温度
float error = 0.0; // 误差
float integral = 0.0; // 误差累积值
float derivative = 0.0; // 误差变化率
float previous_error = 0.0; // 上一次误差
float output = 0.0; // 输出值
int main() {
while (1) {
error = setpoint - temperature; // 计算误差
integral += error; // 更新误差累积值
derivative = error - previous_error; // 计算误差变化率
output = Kp * error + Ki * integral + Kd * derivative; // 计算输出值
previous_error = error; // 保存当前误差作为上一次误差
// 根据输出值进行相应的控制操作,例如调整加热器功率或风扇转速
// 更新当前温度
// temperature = ...;
printf("Output: %.2f\n", output); // 打印输出值
}
return 0;
}
代码中的主要步骤如下:
- 初始化PID参数和变量。
- 进入循环,不断进行温度控制。
- 在循环中,首先计算当前误差(期望温度减去当前温度),然后更新误差累积值和误差变化率。
- 根据PID算法的公式计算输出值。
- 根据输出值进行相应的控制操作,例如调整加热器功率或风扇转速。
- 更新当前温度(这里只是一个示例,实际应用中需要根据具体情况更新温度)。
- 打印输出值。
三、总结
本文详细介绍了PID算法的原理,并给出了一个具体的温度控制系统的示例和相应的C语言代码实现。通过理解PID算法的工作原理和实际应用,我们可以更好地应用PID算法进行系统控制,提高系统的稳定性和响应速度。