这个项目是从0到1 的一个过程,碰到这种项目给我的第一反应就是先查查有没有轮子,往往站在巨人的肩膀上 事情就会变得简单多了。各种搜索后发现网站这类的项目少之又少,唯一一个值得参考的项目 就是Opentcs 了,而且这个项目最近也在不断的更新,还是有很高的参考价值的。
什么是opentcs ?
OpenTCS(Open Transport Control System)是一款独立于供应商且可灵活使用的控制系统软件,适用于自动引导车辆系统 (AGVS) 和其他非连续输送机,例如电动单轨输送机和移动装配平台。它最初是在公共资助项目期间开发的。现在,位于德国多特蒙德的弗劳恩霍夫材料流和物流研究所 (IML)正在维护代码库并继续开发。
OpenTCS 提供了以下主要功能:
- 自动导航和路径规划:OpenTCS支持AGV的自主导航和路径规划,使车辆能够安全地在工厂、仓库或其他环境中移动,避免碰撞和障碍物。
- 任务管理:用户可以使用OpenTCS创建、分配和管理AGV的任务。这些任务可以包括货物搬运、仓库内的分拣、装载和卸载等操作。
- 设备管理:OpenTCS允许用户管理和监视AGV和其他运输设备的状态和性能。这有助于及时发现和解决设备故障。
- 灵活性:OpenTCS是一个高度可配置和可扩展的系统,可以根据特定应用的需求进行定制。它还提供了一个插件系统,允许用户添加自定义功能。
- 用户界面:OpenTCS提供了用户友好的图形用户界面,使操作员能够轻松地监控和控制AGV和任务。
- 集成:OpenTCS可以与其他工厂自动化系统集成,如仓库管理系统(WMS)和生产计划系统(MES),以实现协调的工作流程。
官网地址:https://www.opentcs.org/en/download.html
源代码地址:
现在版本5.9
https://github.com/openTCS/opentcs
为了下面操作的一致性,这里克隆了5.9 版本,地址如下:
https://github.com/hai411741962/opentcs
源码下来后是需要gradle 来下载依赖包,需要安装的请点击这里 gradle 安装
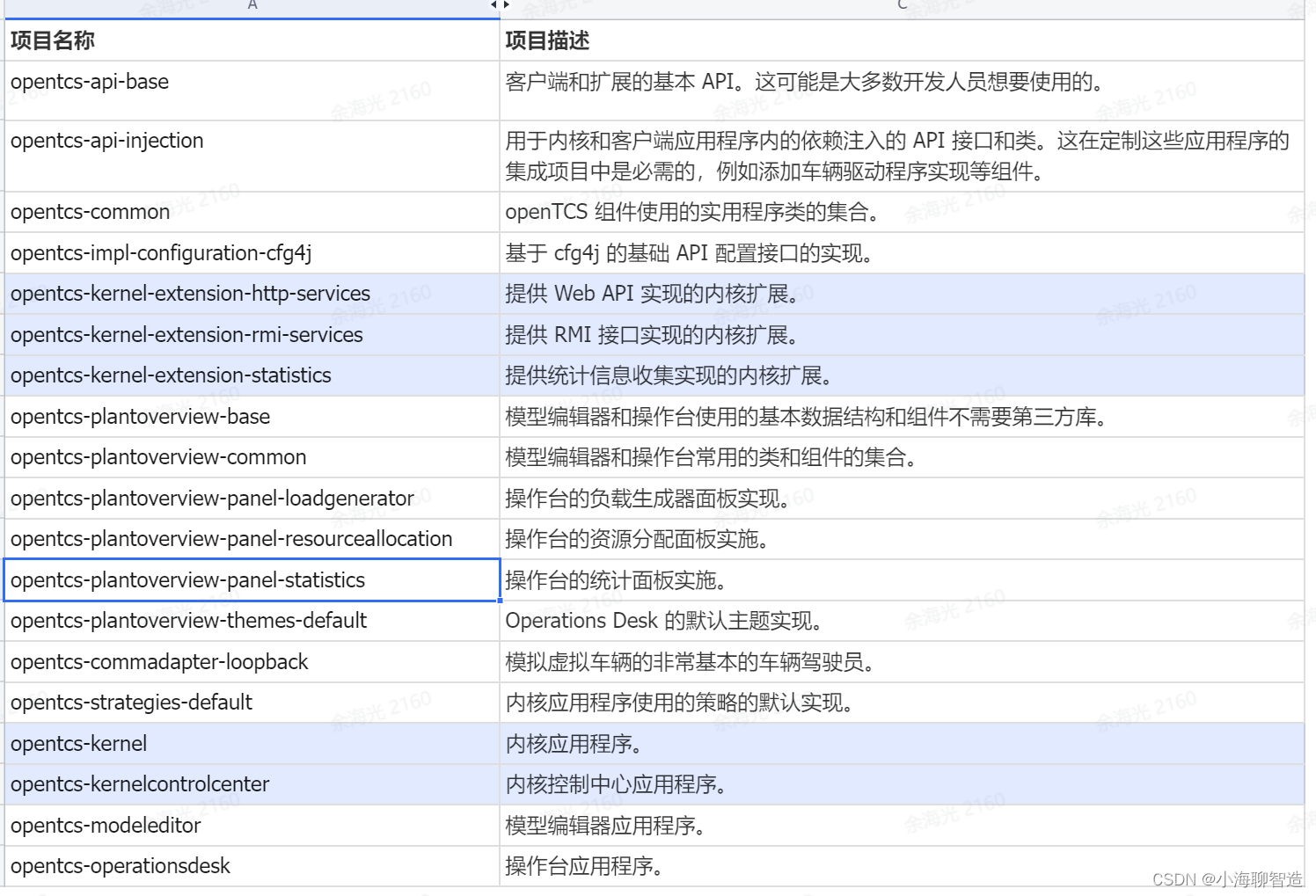
下载后idea 导入后项目目录如下:
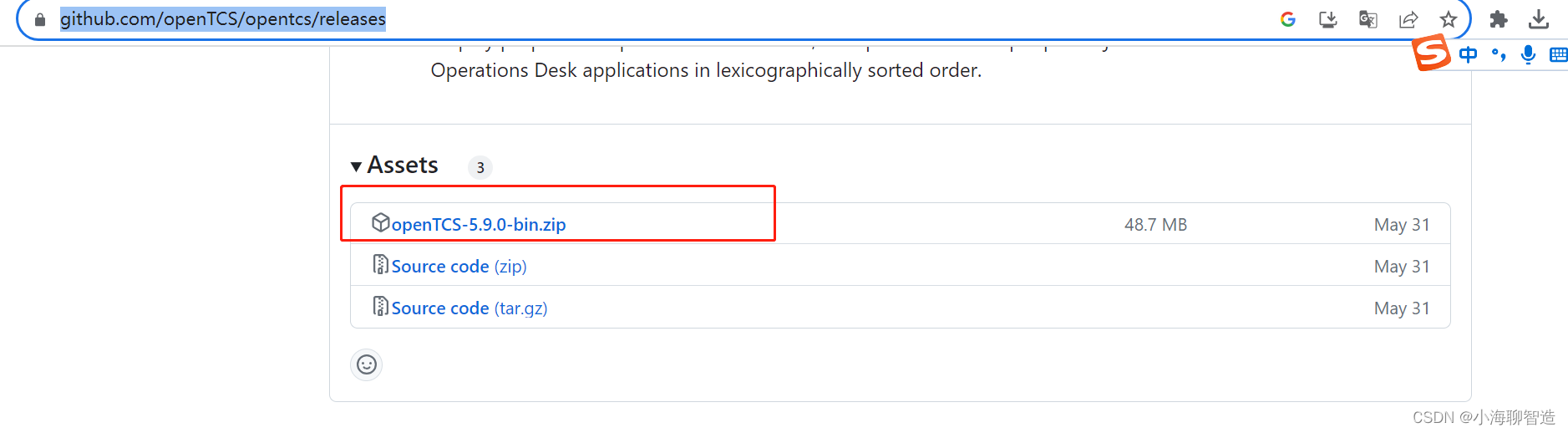
如果只是想体验下的话可直接下载编译后的包
下载地址:https://github.com/openTCS/opentcs/releases
解压后目录如下
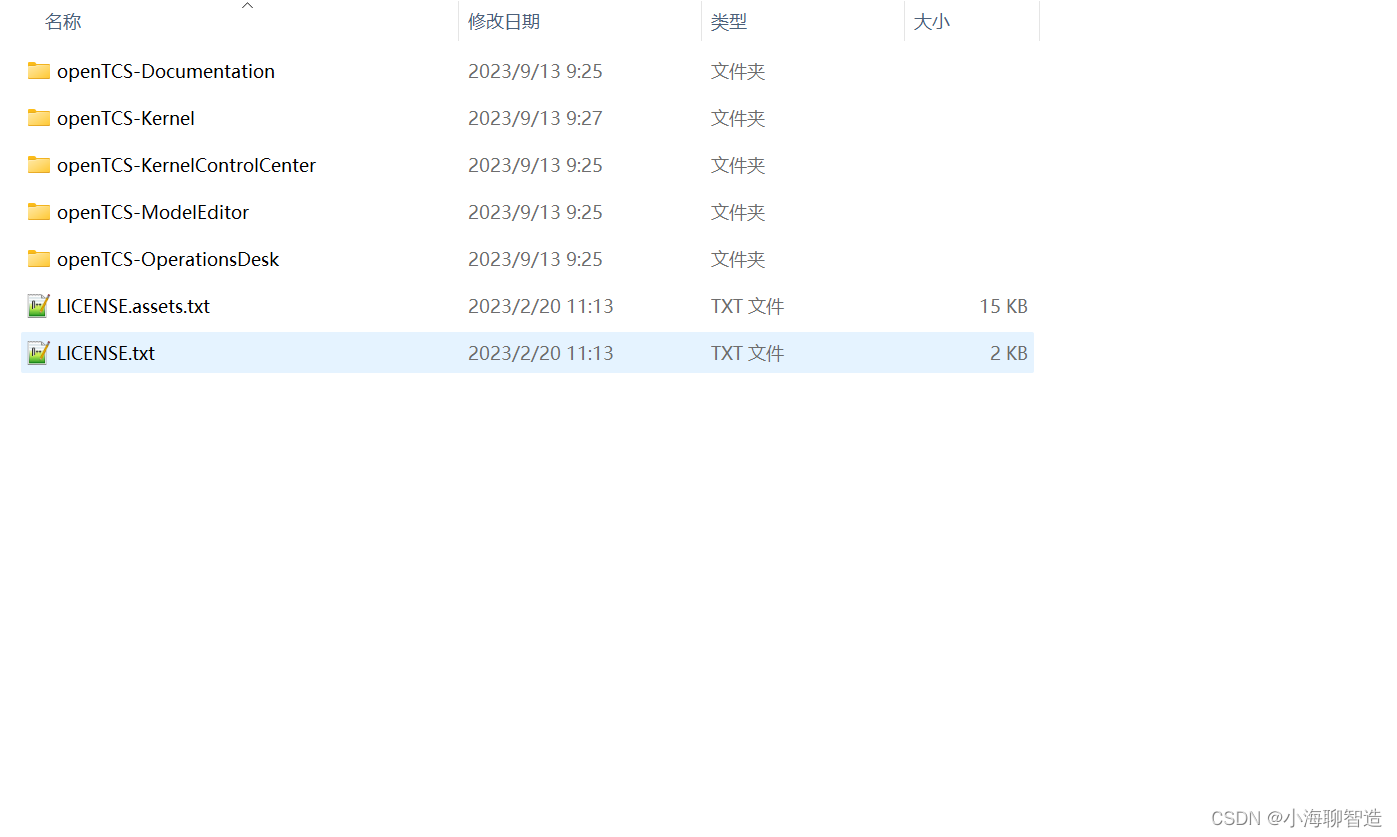
第一个是文档,接下来依次是Kennel 监控中心,监控中间控制器,地图编辑器,以及运行桌面控制器。这样基本的环境都已经准备好了,后面我们就要体验一下 这个软件的各个流程是怎样的!