一、找到工具箱存放位置
首先我们需要找到工具箱的存放位置,点击这个设置路径可以看到

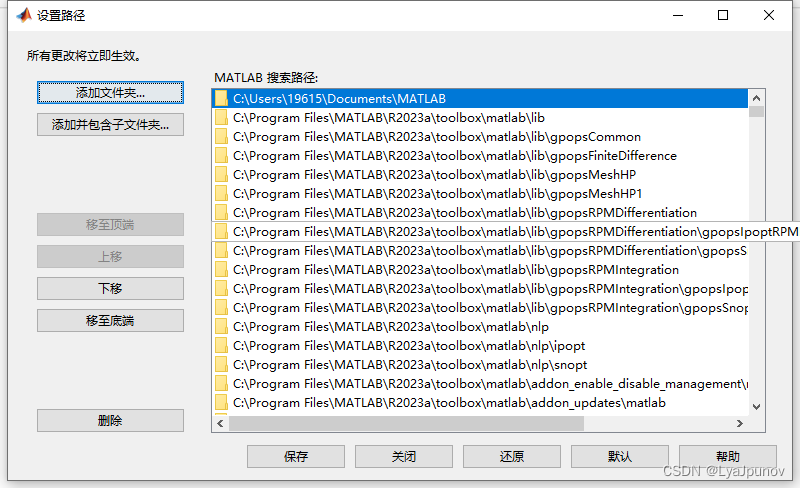
我们的matlab工具箱的存放位置
C:\Program Files\MATLAB\R2023a\toolbox\matlab
从资源管理器中打开这个位置,可以看到里面各种工具箱
二、放入工具箱
解压我们的工具箱gpops,可以看到里面有两个文件夹

将这两个文件夹直接放到上面的工具箱存放位置,可以复制也可以剪切。
三、添加文件
这时我们可以添加我们的工具箱了
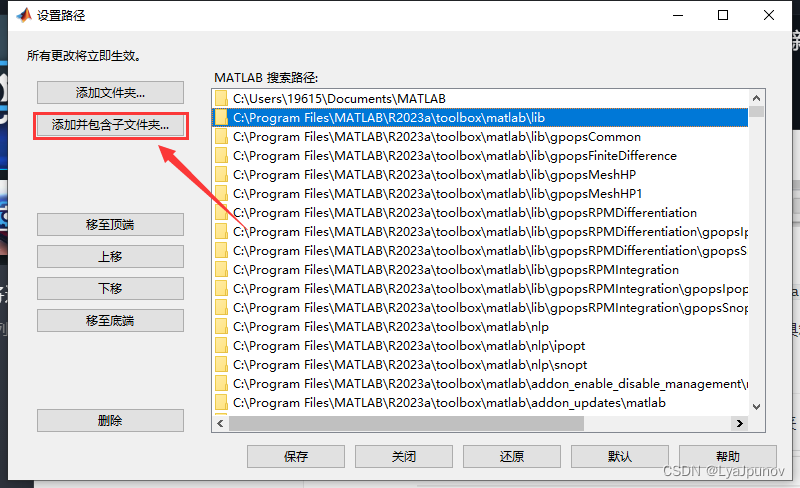
点击添加并包含子文件,找到之前的那两个文件的位置,也就是
C:\Program Files\MATLAB\R2023a\toolbox\matlab\lib
C:\Program Files\MATLAB\R2023a\toolbox\matlab\nlp
将这两个文件添加并包含子文件。
然后就可以在matlab程序中用这两个工具箱了
四、测试GPOPS
刚刚我们添加的工具箱是GPOPS2的工具箱,现在可以测试一下这个工具箱
clc;clear;close all;
tic;
% 设置时间
t0 = 0;
tf = 2;
% 设置状态量初值
x10 = -2;
x20 = 1;
% 设置状态量边界条件
x1Min = -5;
x1Max = 5;
x2Min = -5;
x2Max = 5;
% 设置控制量边界条件
uMin = -1.5;
uMax = 1.5;
bounds.phase.initialtime.lower = t0;
bounds.phase.initialtime.upper = t0;
bounds.phase.finaltime.lower = tf;
bounds.phase.finaltime.upper = tf;
bounds.phase.initialstate.lower = [x10 x20];
bounds.phase.initialstate.upper = [x10 x20];
bounds.phase.state.lower = [x1Min x2Min];
bounds.phase.state.upper = [x1Max x2Max];
bounds.phase.finalstate.lower = [0 0];
bounds.phase.finalstate.upper = [0 0];
bounds.phase.control.lower = uMin;
bounds.phase.control.upper = uMax;
bounds.phase.integral.lower = 0;
bounds.phase.integral.upper = 10000;
guess.phase.time = [t0; tf];
guess.phase.state = [[x10; 0],[x20; 0]];
guess.phase.control = [1; uMin];
guess.phase.integral = 100;
setup.name = 'Vehicle-Stopping-OCP';
setup.functions.continuous = @vsopcContinuous;
setup.functions.endpoint = @vsopcEndpoint;
setup.bounds = bounds;
setup.guess = guess;
setup.nlp.solver = 'snopt';
setup.derivatives.supplier = 'sparseCD';
setup.derivatives.derivativelevel = 'second';
setup.mesh.method = 'hp1';
setup.mesh.tolerance = 1e-6;
setup.mesh.maxiteration = 45;
setup.mesh.colpointsmax = 4;
setup.mesh.colpointsmin = 10;
setup.mesh.phase.fraction = 0.1*ones(1,10);
setup.mesh.phase.colpoints = 4*ones(1,10);
setup.method = 'RPMintegration';
output = gpops2(setup);
solution = output.result.solution;
toc;
%% 函数模块部分
% ----------------------------------------------------------------------- %
% ------------------------- BEGIN: vsopcContinuous.m -------------------- %
% ----------------------------------------------------------------------- %
function phaseout = vsopcContinuous(input)
t = input.phase.time;
% x1 = input.phase.state(:,1);
x2 = input.phase.state(:,2);
u = input.phase.control(:,1);
dx1 = x2;
dx2 = u;
phaseout.dynamics = [dx1, dx2];
phaseout.integrand = 0.5*u.^2;
end
% ----------------------------------------------------------------------- %
% -------------------------- END: vsopcContinuous.m --------------------- %
% ----------------------------------------------------------------------- %
% ----------------------------------------------------------------------- %
% -------------------------- BEGIN: vsopcEndpoint.m --------------------- %
% ----------------------------------------------------------------------- %
function output = vsopcEndpoint(input)
J = input.phase.integral;
output.objective = J;
end
% ----------------------------------------------------------------------- %
% --------------------------- END: vsopcEndpoint.m ---------------------- %
% ----------------------------------------------------------------------- %
这里我们直接使用了别人的程序来进行测试,测试结果是正确的。