MPU6050为三轴陀螺仪,单个MPU6050连接Arduino可参考:Arduino操作MPU6050
当2个MPU6050同时连接Arduino并分别读取数据时,操作如下(以Arduino MEGA board为例):
接线
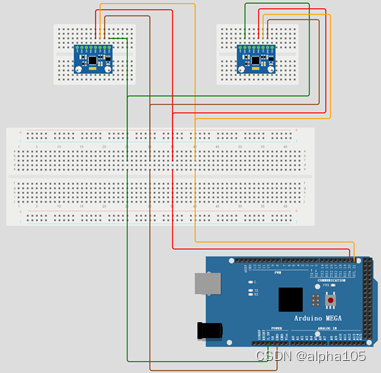
对于第一个MPU6050:
| MPU6050(1) | Arduino MEGA board |
|---|---|
| VCC | 3.3V |
| GND | GND |
| SCL | SCL |
| SDA | SDA |
对于第二个MPU6050(将VCC替换为AD0,连接至3.3V处,其他接线相同):
| MPU6050 (2) | Arduino MEGA board |
|---|---|
| AD0 | 3.3V |
| GND | GND |
| SCL | SCL |
| SDA | SDA |
代码
Arduino IDE中代码如下:
#include "Wire.h"
const int MPU_ADDR1 = 0X68;
const int MPU_ADDR2 = 0X69;
int16_t accelerometer_x, accelerometer_y, accelerometer_z;
int16_t gyro_x, gyro_y, gyro_z;
int16_t temperature;
char tmp_str[7];
char* convert_int16_to_str(int16_t i) {
sprintf(tmp_str, "%d", i);
return tmp_str;
}
void setup() {
Serial.begin(9600);
Wire.begin();
Wire.beginTransmission(MPU_ADDR1);
Wire.write(0x6B);
Wire.write(0);
Wire.endTransmission(true);
Wire.begin();
Wire.beginTransmission(MPU_ADDR2);
Wire.write(0x6B);
Wire.write(0);
Wire.endTransmission(true);
}
void loop() {
Wire.beginTransmission(MPU_ADDR1);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU_ADDR1, 7 * 2, true);
accelerometer_x = Wire.read() << 8 | Wire.read();
accelerometer_y = Wire.read() << 8 | Wire.read();
accelerometer_z = Wire.read() << 8 | Wire.read();
Serial.print(convert_int16_to_str(accelerometer_x));
Serial.print(",");
Serial.print(convert_int16_to_str(accelerometer_y));
Serial.print(",");
Serial.print(convert_int16_to_str(accelerometer_z));
Serial.print("|");
Wire.beginTransmission(MPU_ADDR2);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU_ADDR2, 7 * 2, true);
accelerometer_x = Wire.read() << 8 | Wire.read();
accelerometer_y = Wire.read() << 8 | Wire.read();
accelerometer_z = Wire.read() << 8 | Wire.read();
Serial.print(convert_int16_to_str(accelerometer_x));
Serial.print(",");
Serial.print(convert_int16_to_str(accelerometer_y));
Serial.print(",");
Serial.print(convert_int16_to_str(accelerometer_z));
Serial.println();
delay(200);
}