MPU-60X0 是全球首例 9轴运动处理传感器。它集成了 3轴 MEMS陀螺仪, 3轴 MEMS
加速度计,以及一个可扩展的数字运动处理器 DMP(Digital Motion Processor),可用 I2C
接口连接一个第三方的数字传感器,比如磁力计。扩展之后就可以通过其 I2C或 SPI接口
输出一个 9 轴的信号(SPI接口仅在 MPU-6000可用)。 MPU-60X0也可以通过其 I2C接口
连接非惯性的数字传感器,比如压力传感器。
MPU-60X0 对陀螺仪和加速度计分别用了三个 16位的 ADC,将其测量的模拟量转化
为可输出的数字量。为了精确跟踪快速和慢速的运动,传感器的测量范围都是用户可控的,
陀螺仪可测范围为±250,±500,±1000,±2000°/秒(dps),加速度计可测范围为±2,±4,±8,±16g
对MPU6050的配置主要需要1.上电检测芯片序列号,自检 2.设定加速度陀螺仪的阈值和检测频率3.设定外部链接设备的驱动模式以及地址4.设定中断模式,比如要打开自由落体中断需要的设置,数据准备好中断需要的设置等5.设定电源管理模式,防止进入休眠6.循环读取数据
MPU输出一共三种数据,包括陀螺仪输出加速度传感器输出和温度输出,温度输出需要计算,计算方法是读出16位温度数据temp,然后temp/340.0 + 36.53
另外,中断引脚的模式也是可以配置的,详细的说明在MPU6050驱动的头文件中有,包含每一个寄存器的说明,请查看源码,如下
1 #ifndef __MPU6050_H_ 2 #define __MPU6050_H_ 3 4 #include "common.h" 5 #include "ioremap.h" 6 #include "stm32f10x.h" 7 #include "delay.h" 8 #include "uart.h" 9 10 #define MPU_ACK_WAIT_TIME 200 //us 11 12 #define MPU6050_ADDRESS_AD0_LOW 0xD0 // AD0为低的时候设备的写地址 13 #define MPU6050_ADDRESS_AD0_HIGH 0XD1 // AD0为高的时候设备的写地址 14 #define MPU_ADDR 0xD0 //IIC写入时的地址字节数据 15 16 17 #define MPU_DEBUG 1 18 19 //技术文档未公布的寄存器 主要用于官方DMP操作 20 #define MPU6050_RA_XG_OFFS_TC 0x00 //[bit7] PWR_MODE, [6:1] XG_OFFS_TC, [bit 0] OTP_BNK_VLD 21 #define MPU6050_RA_YG_OFFS_TC 0x01 //[7] PWR_MODE, [6:1] YG_OFFS_TC, [0] OTP_BNK_VLD 22 //bit7的定义,当设置为1,辅助I2C总线高电平是VDD。当设置为0,辅助I2C总线高电平是VLOGIC 23 24 #define MPU6050_RA_ZG_OFFS_TC 0x02 //[7] PWR_MODE, [6:1] ZG_OFFS_TC, [0] OTP_BNK_VLD 25 #define MPU6050_RA_X_FINE_GAIN 0x03 //[7:0] X_FINE_GAIN 26 #define MPU6050_RA_Y_FINE_GAIN 0x04 //[7:0] Y_FINE_GAIN 27 #define MPU6050_RA_Z_FINE_GAIN 0x05 //[7:0] Z_FINE_GAIN 28 29 #define MPU6050_RA_XA_OFFS_H 0x06 //[15:0] XA_OFFS 两个寄存器合在一起 30 #define MPU6050_RA_XA_OFFS_L_TC 0x07 31 32 #define MPU6050_RA_YA_OFFS_H 0x08 //[15:0] YA_OFFS 两个寄存器合在一起 33 #define MPU6050_RA_YA_OFFS_L_TC 0x09 34 35 #define MPU6050_RA_ZA_OFFS_H 0x0A //[15:0] ZA_OFFS 两个寄存器合在一起 36 #define MPU6050_RA_ZA_OFFS_L_TC 0x0B 37 38 #define MPU6050_RA_XG_OFFS_USRH 0x13 //[15:0] XG_OFFS_USR 两个寄存器合在一起 39 #define MPU6050_RA_XG_OFFS_USRL 0x14 40 41 #define MPU6050_RA_YG_OFFS_USRH 0x15 //[15:0] YG_OFFS_USR 两个寄存器合在一起 42 #define MPU6050_RA_YG_OFFS_USRL 0x16 43 44 #define MPU6050_RA_ZG_OFFS_USRH 0x17 //[15:0] ZG_OFFS_USR 两个寄存器合在一起 45 #define MPU6050_RA_ZG_OFFS_USRL 0x18 46 47 /*陀螺仪的采样频率*/ 48 /*传感器的寄存器输出,FIFO输出,DMP采样、运动检测、 49 *零运动检测和自由落体检测都是基于采样率。 50 *通过SMPLRT_DIV把陀螺仪输出率分频即可得到采样率 51 *采样率=陀螺仪输出率/ (1 + SMPLRT_DIV) 52 *禁用DLPF的情况下(DLPF_CFG = 0或7) ,陀螺仪输出率= 8 khz 53 *在启用DLPF(见寄存器26)时,陀螺仪输出率= 1 khz 54 *加速度传感器输出率是1 khz。这意味着,采样率大于1 khz时, 55 *同一个加速度传感器的样品可能会多次输入到FIFO、DMP和传感器寄存器*/ 56 #define MPU6050_RA_SMPLRT_DIV 0x19 //[0-7] 陀螺仪输出分频采样率 57 58 /*配置外部引脚采样和DLPF数字低通滤波器*/ 59 #define MPU6050_RA_CONFIG 0x1A 60 //bit5-bit3 一个连接到FSYNC端口的外部信号可以通过配置EXT_SYNC_SET来采样 61 // 也就是说,这里设置之后,FSYNC的电平0或1进入最终数据寄存器,具体如下 62 // 0 不使用 1 FSYNC电平进入所有数据寄存器 2 FSYNC电平进入GYRO_XOUT_L 3 FSYNC电平进入GYRO_YOUT_L 63 // 4 FSYNC电平进入GYRO_ZOUT_L 5 FSYNC电平进入ACCEL_XOUT_L 6 FSYNC电平进入ACCEL_YOUT_L 64 // 7 FSYNC电平进入SYNC_ACCEL_ZOUT_L 65 //bit2-bit0 数字低通滤波器 用于滤除高频干扰 高于这个频率的干扰被滤除掉 66 /*对应关系如下 67 * * | 加速度传感器 | 陀螺仪 68 * * DLPF_CFG | 带宽 | 延迟 | 带宽 | 延迟 | 采样率 69 * -------------+--------+-------+--------+------+------------- 70 * 0 | 260Hz | 0ms | 256Hz | 0.98ms | 8kHz 71 * 1 | 184Hz | 2.0ms | 188Hz | 1.9ms | 1kHz 72 * 2 | 94Hz | 3.0ms | 98Hz | 2.8ms | 1kHz 73 * 3 | 44Hz | 4.9ms | 42Hz | 4.8ms | 1kHz 74 * 4 | 21Hz | 8.5ms | 20Hz | 8.3ms | 1kHz 75 * 5 | 10Hz | 13.8ms | 10Hz | 13.4ms | 1kHz 76 * 6 | 5Hz | 19.0ms | 5Hz | 18.6ms | 1kHz 77 * 7 | Reserved | Reserved | Reserved 78 * */ 79 80 81 /*陀螺仪的配置,主要是配置陀螺仪的量程与自检(通过相应的位7 6 5 开启自检)*/ 82 #define MPU6050_RA_GYRO_CONFIG 0x1B 83 //bit4-bit3 量程设置如下 84 // 0 = +/- 250 度/秒 85 // 1 = +/- 500 度/秒 86 // 2 = +/- 1000 度/秒 87 // 3 = +/- 2000 度/秒*/ 88 89 /*加速度计的配置,主要是配置加速度计的量程与自检(通过相应的位7 6 5 开启自检) 90 *另外,还能配置系统的高通滤波器*/ 91 #define MPU6050_RA_ACCEL_CONFIG 0x1C 92 //bit7 启动X自检 加速度计的自检 93 //bit6 启动Y自检 94 //bit5 启动Z自检 95 //bit4-bit3 加速度传感器的量程配置 96 // 0 = +/- 2g 97 // 1 = +/- 4g 98 // 2 = +/- 8g 99 // 3 = +/- 16g*/ 100 //bit0到bit2 加速度传感器的高通滤波器 101 /*DHPF是在路径中连接于运动探测器(自由落体,运动阈值,零运动)的一个滤波器模块。 102 *高通滤波器的输出值不在数据寄存器中 103 *高通滤波器有三种模式: 104 *重置:在一个样本中将滤波器输出值设为零。这有效的禁用了高通滤波器。这种模式可以快速切换滤波器的设置模式。 105 *开启:高通滤波器能通过高于截止频率的信号 106 *持续:触发后,过滤器持续当前采样。过滤器输出值是输入样本和持续样本之间的差异 107 *设置值如下所示 108 * ACCEL_HPF | 高通滤波模式| 截止频率 109 * ----------+-------------+------------------ 110 * 0 | Reset | None 111 * 1 | On | 5Hz 112 * 2 | On | 2.5Hz 113 * 3 | On | 1.25Hz 114 * 4 | On | 0.63Hz 115 * 7 | Hold | None 116 */ 117 118 #define MPU6050_RA_FF_THR 0x1D 119 /*自由落体加速度的阈值 120 *这个寄存器为自由落体的阈值检测进行配置。 121 *FF_THR的单位是1LSB = 2mg。当加速度传感器测量而得的三个轴的绝对值 122 *都小于检测阈值时,就可以测得自由落体值。这种情况下,(加速度计每次检测到就+1以下,所以还要依靠加速度采样率) 123 *自由落体时间计数器计数一次 (寄存器30)。当自由落体时间计数器达到 124 *FF_DUR中规定的时间时,自由落体被中断(或发生自由落体中断) 125 **/ 126 127 #define MPU6050_RA_FF_DUR 0x1E 128 /* 129 *自由落体加速度的时间阈值 130 * 这个寄存器为自由落体时间阈值计数器进行配置。 131 * 时间计数频率为1 khz,因此FF_DUR的单位是 1 LSB = 1毫秒。 132 * 当加速度器测量而得的绝对值都小于检测阈值时, 133 * 自由落体时间计数器计数一次。当自由落体时间计数器 134 * 达到该寄存器的规定时间时,自由落体被中断。 135 * (或发生自由落体中断) 136 * */ 137 138 #define MPU6050_RA_MOT_THR 0x1F 139 /* 140 *运动检测的加速度阈值 141 *这个寄存器为运动中断的阈值检测进行配置。 142 *MOT_THR的单位是 1LSB = 2mg。 143 *当加速度器测量而得的绝对值都超过该运动检测的阈值时, 144 *即可测得该运动。这一情况下,运动时间检测计数器计数一次。 145 *当运动检测计数器达到MOT_DUR的规定时间时,运动检测被中断。 146 * 运动中断表明了被检测的运动MOT_DETECT_STATUS (Register 97)的轴和极性。 147 */ 148 149 #define MPU6050_RA_MOT_DUR 0x20 150 /* 151 *运动检测时间的阈值。 152 *这个寄存器为运动中断的阈值检测进行配置。 153 *时间计数器计数频率为1 kHz ,因此MOT_THR的单位是 1LSB = 1ms。 154 *当加速度器测量而得的绝对值都超过该运动检测的阈值时(Register 31), 155 *运动检测时间计数器计数一次。当运动检测计数器达到该寄存器规定的时间时, 156 *运动检测被中断。 157 **/ 158 159 #define MPU6050_RA_ZRMOT_THR 0x21 160 /* 161 *零运动检测加速度阈值。 162 * 这个寄存器为零运动中断检测进行配置。 163 * ZRMOT_THR的单位是1LSB = 2mg。 164 * 当加速度器测量而得的三个轴的绝对值都小于检测阈值时, 165 * 就可以测得零运动。这种情况下,零运动时间计数器计数一次 (寄存器34)。 166 * 当自零运动时间计数器达到ZRMOT_DUR (Register 34)中规定的时间时,零运动被中断。 167 * 与自由落体或运动检测不同的是,当零运动首次检测到以及当零运动检测不到时,零运动检测都被中断。 168 * 当零运动被检测到时,其状态将在MOT_DETECT_STATUS寄存器(寄存器97) 中显示出来。 169 * 当运动状态变为零运动状态被检测到时,状态位设置为1。当零运动状态变为运动状态被检测到时, 170 * 状态位设置为0。 171 **/ 172 173 #define MPU6050_RA_ZRMOT_DUR 0x22 174 /* 175 *零运动检测的时间阈值 176 * 这个寄存器为零运动中断检测进行时间计数器的配置。 177 * 时间计数器的计数频率为16 Hz,因此ZRMOT_DUR的单位是1 LSB = 64 ms。 178 * 当加速度器测量而得的绝对值都小于检测器的阈值(Register 33)时, 179 * 运动检测时间计数器计数一次。当零运动检测计数器达到该寄存器规定的时间时, 180 * 零运动检测被中断。 181 **/ 182 183 184 /* 185 *设备的各种FIFO使能,包括温度 加速度 陀螺仪 从机 186 *将相关的数据写入FIFO缓冲中 187 **/ 188 #define MPU6050_RA_FIFO_EN 0x23 189 //bit7 温度fifo使能 190 //bit6 陀螺仪Xfifo使能 191 //bit5 陀螺仪Yfifo使能 192 //bit4 陀螺仪Zfifo使能 193 //bit3 加速度传感器fifo使能 194 //bit2 外部从设备2fifo使能 195 //bit1 外部从设备1fifo使能 196 //bit0 外部从设备0fifo使能 197 198 #define MPU6050_RA_I2C_MST_CTRL 0x24 199 //配置单主机或者多主机下的IIC总线 200 //bit7 监视从设备总线,看总线是否可用 MULT_MST_EN设置为1时,MPU-60X0的总线仲裁检测逻辑被打开 201 //bit6 延迟数据就绪中断,直达从设备数据也进入主机再触发 相当于数据同步等待 202 //bit5 当设置为1时,与Slave3 相连的外部传感器数据(寄存器73 到寄存器 96)写入FIFO缓冲中,每次都写入 203 //bit4 主机读取一个从机到下一个从机读取之间的动作 为0 读取之间有一个restart,为1 下一次读取前会有一个重启,然后 204 // 一直读取直到切换写入或者切换设备 205 //bit3-bit0 配置MPU作为IIC主机时的时钟,基于MPU内部8M的分频 206 /* I2C_MST_CLK | I2C 主时钟速度 | 8MHz 时钟分频器 207 * ------------+------------------------+------------------- 208 * 0 | 348kHz | 23 209 * 1 | 333kHz | 24 210 * 2 | 320kHz | 25 211 * 3 | 308kHz | 26 212 * 4 | 296kHz | 27 213 * 5 | 286kHz | 28 214 * 6 | 276kHz | 29 215 * 7 | 267kHz | 30 216 * 8 | 258kHz | 31 217 * 9 | 500kHz | 16 218 * 10 | 471kHz | 17 219 * 11 | 444kHz | 18 220 * 12 | 421kHz | 19 221 * 13 | 400kHz | 20 222 * 14 | 381kHz | 21 223 * 15 | 364kHz | 22 224 * */ 225 226 227 228 /**************************MPU链接IIC从设备控制寄存器,没使用从机连接的基本不用考虑这些************************************/ 229 /*指定slave (0-3)的I2C地址 230 * 注意Bit 7 (MSB)控制了读/写模式。如果设置了Bit 7,那么这是一个读取操作, 231 * 如果将其清除,那么这是一个编写操作。其余位(6-0)是slave设备的7-bit设备地址。 232 * 在读取模式中,读取结果是存储于最低可用的EXT_SENS_DATA寄存器中。 233 * MPU-6050支持全5个slave,但Slave 4有其特殊功能(getSlave4* 和setSlave4*)。 234 * 如寄存器25中所述,I2C数据转换通过采样率体现。用户负责确保I2C数据转换能够 235 * 在一个采样率周期内完成。 236 * I2C slave数据传输速率可根据采样率来减小。 237 * 减小的传输速率是由I2C_MST_DLY(寄存器52)所决定的。 238 * slave数据传输速率是否根据采样率来减小是由I2C_MST_DELAY_CTRL (寄存器103)所决定的。 239 * slave的处理指令是固定的。Slave的处理顺序是Slave 1, Slave 2, Slave 3 和 Slave 4。 240 * 如果某一个Slave被禁用了,那么它会被自动忽略。 241 * 每个slave可按采样率或降低的采样率来读取。在有些slave以采样率读取有些以减小 242 * 的采样率读取的情况下,slave的读取顺序依旧不变。然而, 243 * 如果一些slave的读取速率不能在特定循环中进行读取,那么它们会被自动忽略 244 * 更多降低的读取速率相关信息,请参阅寄存器52。 245 * Slave是否按采样率或降低的采样率来读取由寄存器103得Delay Enable位来决定 246 **/ 247 248 //从机0设置相关 249 #define MPU6050_RA_I2C_SLV0_ADDR 0x25 250 //bit7 当前IIC 从设备0的操作,1为读取 0写入 251 //bit6-bit0 从机设备的地址 252 /* 要读取或者要写入的设备内部的寄存器地址,不管读取还是写入*/ 253 #define MPU6050_RA_I2C_SLV0_REG 0x26 254 /*iic从机系统配置寄存器*/ 255 #define MPU6050_RA_I2C_SLV0_CTRL 0x27 256 //bit7 启动或者禁止这个设备的IIC数据传送过程 257 //bit6 当设置为1时,字节交换启用。当启用字节交换时,词对的高低字节即可交换 258 //bit5 当 I2C_SLV0_REG_DIS 置 1,只能进行读取或者写入数据。当该位清 0,可以再读取 259 // 或写入数据之前写入一个寄存器地址。当指定从机设备内部的寄存器地址进行发送或接收 260 // 数据时,该位必须等于 0 261 //bit4 指定从寄存器收到的字符对的分组顺序。当该位清 0,寄存器地址 262 // 0和 1, 2 和 3 的字节是分别成对(甚至,奇数寄存器地址 ) ,作为一个字符对。当该位置 1, 263 // 寄存器地址 1 和 2, 3 和 4 的字节是分别成对的,作为一个字符对 264 //bit3-bit0 指定从机 0 发送字符的长度。由Slave 0转换而来和转换至Slave 0的字节数,(IIC一次传输的长度) 265 // 该位清 0,I2C_SLV0_EN 位自动置 0. 266 267 /*IIC SLAVE1配置寄存器,与0相同*/ 268 269 #define MPU6050_RA_I2C_SLV1_ADDR 0x28 270 #define MPU6050_RA_I2C_SLV1_REG 0x29 271 #define MPU6050_RA_I2C_SLV1_CTRL 0x2A 272 273 /*IIC SLAVE2配置寄存器,与0相同*/ 274 #define MPU6050_RA_I2C_SLV2_ADDR 0x2B 275 #define MPU6050_RA_I2C_SLV2_REG 0x2C 276 #define MPU6050_RA_I2C_SLV2_CTRL 0x2D 277 278 /*IIC SLAVE3配置寄存器,与0相同*/ 279 #define MPU6050_RA_I2C_SLV3_ADDR 0x2E 280 #define MPU6050_RA_I2C_SLV3_REG 0x2F 281 #define MPU6050_RA_I2C_SLV3_CTRL 0x30 282 283 /*slave4的I2C地址 IIC4与前几个的寄存器定义有所不同*/ 284 #define MPU6050_RA_I2C_SLV4_ADDR 0x31 //与IIC SLAVE1类似 285 #define MPU6050_RA_I2C_SLV4_REG 0x32 /*slave4的当前内部寄存器*/ 286 #define MPU6050_RA_I2C_SLV4_DO 0x33 287 /*写于slave4的新字节这一寄存器可储存写于slave4的数据。 288 * 如果I2C_SLV4_RW设置为1(设置为读取模式),那么该寄存器无法执行操作*/ 289 #define MPU6050_RA_I2C_SLV4_CTRL 0x34 290 //当设置为1时,此位启用了slave4的转换操作。当设置为0时,则禁用该操作 291 #define MPU6050_I2C_SLV4_EN_BIT 7 292 //当设置为1时,此位启用了slave4事务完成的中断信号的生成。 293 // 当清除为0时,则禁用了该信号的生成。这一中断状态可在寄存器54中看到。 294 #define MPU6050_I2C_SLV4_INT_EN_BIT 6 295 //当设置为1时,只进行数据的读或写操作。当设置为0时, 296 // 在读写数据之前将编写一个寄存器地址。当指定寄存器地址在slave设备中时 297 // ,这应该等于0,而在该寄存器中会进行数据处理。 298 #define MPU6050_I2C_SLV4_REG_DIS_BIT 5 299 //采样率延迟,这为根据采样率减小的I2C slaves传输速率进行了配置。 300 // 当一个slave的传输速率是根据采样率而降低的,那么该slave是以每1 / (1 + I2C_MST_DLY) 个样本进行传输。 301 // 这一基本的采样率也是由SMPLRT_DIV (寄存器 25)和DLPF_CFG (寄存器26)所决定的的。 302 // slave传输速率是否根据采样率来减小是由I2C_MST_DELAY_CTRL (寄存器103)所决定的 303 #define MPU6050_I2C_SLV4_MST_DLY_BIT 4 //[4:0] 304 #define MPU6050_I2C_SLV4_MST_DLY_LENGTH 5 305 /*slave4中可读取的最后可用字节*/ 306 #define MPU6050_RA_I2C_SLV4_DI 0x35 307 308 /* 309 * IIC辅助从机系统中断状态 310 **/ 311 #define MPU6050_RA_I2C_MST_STATUS 0x36 312 //bit7 此位反映了一个与MPU-60X0相连的外部设备的FSYNC中断状态。 313 // 当设置为1且在INT_PIN_CFG(寄存器55)中断言FSYNC_INT_EN时,中断产生。 314 //bit6 当slave4事务完成时,设备会自动设置为1 如果定义了INT_ENABLE中的I2C_MST_INT_EN则产生中断 315 //bit5 I2C主机失去辅助I2C总线(一个错误状态)的仲裁,此位自动设置为1.如果断言了INT_ENABLE寄存器 316 // (寄存器56)中的I2C_MST_INT_EN位,则中断产生 317 //bit4 slave4的NACK状态 318 //bit3 slave3的NACK状态 319 //bit2 slave2的NACK状态 320 //bit1 slave1的NACK状态 321 //bit0 slave0的NACK状态 322 323 324 /*中断引脚配置寄存器*/ 325 #define MPU6050_RA_INT_PIN_CFG 0x37 326 //bit7 中断的逻辑电平模式,高电平时,设置为0;低电平时,设置为1 327 //bit6 中断驱动模式,推拉模式设置为0,开漏模式设置为1. 328 //bit5 中断锁存模式.50us-pulse模式设置为0,latch-until-int-cleared模式设置为1 329 //bit4 中断锁存清除模式 status-read-only状态设置为0,any-register-read状态设置为1. 330 //bit3 FSYNC中断逻辑电平模式 0=active-high, 1=active-low 331 //bit2 FSYNC端口中断启用设置设置为0时禁用,设置为1时启用 332 //bit1 I2C支路启用状态,此位等于1且I2C_MST_EN (寄存器 106 位[5])等于0时,主机应用程序处理器能够直接访问MPU-60X0的辅助I2C总线 333 // 否则无论如何都不能直接访问 334 //bit0 当此位为1时,CLKOUT端口可以输出参考时钟。当此位为0时,输出禁用 335 336 337 /*部分中断使能*/ 338 #define MPU6050_RA_INT_ENABLE 0x38 339 //bit7 自由落体中断使能 340 //bit6 运动检测中断使能 341 //bit5 零运动检测中断使能 342 //bit4 FIFO溢出中断使能 343 //bit3 IIC主机所有中断源使能 344 //bit0 数据就绪中断使能 345 346 347 /*DMP中断使能*/ 348 #define MPU6050_RA_DMP_INT_STATUS 0x39 349 //不知道这些位的具体作用是什么,官方语焉不详,但是的确存在 350 #define MPU6050_DMPINT_4_BIT 4 351 #define MPU6050_DMPINT_3_BIT 3 352 #define MPU6050_DMPINT_2_BIT 2 353 #define MPU6050_DMPINT_1_BIT 1 354 #define MPU6050_DMPINT_0_BIT 0 355 356 /*DMP中断配置*/ 357 #define MPU6050_RA_INT_STATUS 0x3A 358 //DMP中断位之一使能 359 #define MPU6050_INTERRUPT_PLL_RDY_INT_BIT 2 360 //DMP中断位之二使能 361 #define MPU6050_INTERRUPT_DMP_INT_BIT 1 362 363 /*加速度X输出*/ 364 #define MPU6050_RA_ACCEL_XOUT_H 0x3B 365 #define MPU6050_RA_ACCEL_XOUT_L 0x3C 366 367 /*加速度Y输出*/ 368 #define MPU6050_RA_ACCEL_YOUT_H 0x3D 369 #define MPU6050_RA_ACCEL_YOUT_L 0x3E 370 371 /*加速度Z输出*/ 372 #define MPU6050_RA_ACCEL_ZOUT_H 0x3F 373 #define MPU6050_RA_ACCEL_ZOUT_L 0x40 374 375 /*温度值输出*/ 376 #define MPU6050_RA_TEMP_OUT_H 0x41 377 #define MPU6050_RA_TEMP_OUT_L 0x42 378 379 /*陀螺仪X输出*/ 380 #define MPU6050_RA_GYRO_XOUT_H 0x43 381 #define MPU6050_RA_GYRO_XOUT_L 0x44 382 383 /*陀螺仪Y输出*/ 384 #define MPU6050_RA_GYRO_YOUT_H 0x45 385 #define MPU6050_RA_GYRO_YOUT_L 0x46 386 387 /*陀螺仪Z输出*/ 388 #define MPU6050_RA_GYRO_ZOUT_H 0x47 389 #define MPU6050_RA_GYRO_ZOUT_L 0x48 390 391 /*从IIC从机上获取到的数据*/ 392 #define MPU6050_RA_EXT_SENS_DATA_00 0x49 393 #define MPU6050_RA_EXT_SENS_DATA_01 0x4A 394 #define MPU6050_RA_EXT_SENS_DATA_02 0x4B 395 #define MPU6050_RA_EXT_SENS_DATA_03 0x4C 396 #define MPU6050_RA_EXT_SENS_DATA_04 0x4D 397 #define MPU6050_RA_EXT_SENS_DATA_05 0x4E 398 #define MPU6050_RA_EXT_SENS_DATA_06 0x4F 399 #define MPU6050_RA_EXT_SENS_DATA_07 0x50 400 #define MPU6050_RA_EXT_SENS_DATA_08 0x51 401 #define MPU6050_RA_EXT_SENS_DATA_09 0x52 402 #define MPU6050_RA_EXT_SENS_DATA_10 0x53 403 #define MPU6050_RA_EXT_SENS_DATA_11 0x54 404 #define MPU6050_RA_EXT_SENS_DATA_12 0x55 405 #define MPU6050_RA_EXT_SENS_DATA_13 0x56 406 #define MPU6050_RA_EXT_SENS_DATA_14 0x57 407 #define MPU6050_RA_EXT_SENS_DATA_15 0x58 408 #define MPU6050_RA_EXT_SENS_DATA_16 0x59 409 #define MPU6050_RA_EXT_SENS_DATA_17 0x5A 410 #define MPU6050_RA_EXT_SENS_DATA_18 0x5B 411 #define MPU6050_RA_EXT_SENS_DATA_19 0x5C 412 #define MPU6050_RA_EXT_SENS_DATA_20 0x5D 413 #define MPU6050_RA_EXT_SENS_DATA_21 0x5E 414 #define MPU6050_RA_EXT_SENS_DATA_22 0x5F 415 #define MPU6050_RA_EXT_SENS_DATA_23 0x60 416 417 //运动检测的状态 418 #define MPU6050_RA_MOT_DETECT_STATUS 0x61 419 //bit7 x轴反向运动检测中断状态 420 //bit6 x轴正向运动检测中断状态 421 //bit5 Y轴反向运动检测中断状态 422 //bit4 Y轴正向运动检测中断状态 423 //bit3 Z轴反向运动检测中断状态 424 //bit2 Z轴正向运动检测中断状态 425 //bit1 426 //bit0 零运动检测中断状态 427 // 428 429 430 /*写入到IIC从机中的数据,指定的slv数据输出容器*/ 431 #define MPU6050_RA_I2C_SLV0_DO 0x63 432 #define MPU6050_RA_I2C_SLV1_DO 0x64 433 #define MPU6050_RA_I2C_SLV2_DO 0x65 434 #define MPU6050_RA_I2C_SLV3_DO 0x66 435 436 /*外部影子寄存器的配置,这个寄存器用于指定外部传感器数据影子的时间 437 *当启用了某一特定的slave,其传输速率就会减小。 438 *当一个slave的传输速率是根据采样率而降低的,那么该slave是以 439 *每1 / (1 + I2C_MST_DLY) 个样本进行传输。 440 * 1 / (1 + I2C_MST_DLY) Samples 441 * 这一基本的采样率也是由SMPLRT_DIV (寄存器 25)和DLPF_CFG (寄存器26)所决定的的。*/ 442 #define MPU6050_RA_I2C_MST_DELAY_CTRL 0x67 443 //DELAY_ES_SHADOW设置为1,跟随外部传感器数据影子将会延迟到所有的数据接收完毕。 444 #define MPU6050_DELAYCTRL_DELAY_ES_SHADOW_BIT 7 445 //slv4-0的配置 446 #define MPU6050_DELAYCTRL_I2C_SLV4_DLY_EN_BIT 4 447 #define MPU6050_DELAYCTRL_I2C_SLV3_DLY_EN_BIT 3 448 #define MPU6050_DELAYCTRL_I2C_SLV2_DLY_EN_BIT 2 449 #define MPU6050_DELAYCTRL_I2C_SLV1_DLY_EN_BIT 1 450 #define MPU6050_DELAYCTRL_I2C_SLV0_DLY_EN_BIT 0 451 452 /*用于陀螺仪,加速度计,温度传感器的模拟和数字信号通道的复位。 453 复位会还原模数转换信号通道和清除他们的上电配置*/ 454 #define MPU6050_RA_SIGNAL_PATH_RESET 0x68 455 //bit2 重置陀螺仪的信号路径 456 //bit1 重置加速度传感器的信号路径 457 //bit0 重置温度传感器的信号路径 458 459 460 /*获取加速度传感器启动延迟 还有滤波器的一些配置 461 * 加速度传感器数据路径为传感器寄存器、运动检测、 462 * 零运动检测和自由落体检测模块提供样本。在检测模块开始操作之前, 463 * 包含过滤器的信号路径必须用新样本来启用。 464 * 默认的4毫秒唤醒延迟时间可以加长3毫秒以上。在ACCEL_ON_DELAY中规定 465 * 这个延迟以1 LSB = 1 毫秒为单位。除非InvenSense另行指示, 466 * 用户可以选择任何大于零的值。*/ 467 #define MPU6050_RA_MOT_DETECT_CTRL 0x69 468 //具体的有效控制位 469 //bit5-bit4 [5:4]1-4ms 延时时间1-4ms选择 470 //bit3-bit2 自由落体检测计数器的减量配置。 471 // 当指定数量的样本的加速度测量都满足其各自的阈值条件时, 472 // 检测结果存储于自由落体检测模块中。当满足阈值条件时, 473 // 相应的检测计数器递增1。用户可通过FF_COUNT配置不满足阈值条件来减量。 474 // 减量率可根据下表进行设置: 475 /* FF_COUNT | 计数器减量 476 * ---------+------------------ 477 * 0 | 重置 478 * 1 | 1 479 * 2 | 2 480 * 3 | 4 481 * 当FF_COUNT配置为0(复位)时,任何不合格的样品都将计数器重置为0*/ 482 //bit1-bit0 运动检测计数器的减量配置。 483 // 当指定数量的样本的加速度测量都满足其各自的阈值条件时, 484 // 检测结果存储于运动检测模块中。当满足阈值条件时,相应的检测计数器递增1。 485 // 用户可通过MOT_COUNT配置不满足阈值条件来减量。减量率可根据下表进行设置: 486 // MOT_COUNT | 计数器减量 487 /* ----------+------------------ 488 * 0 | 重置 489 * 1 | 1 490 * 2 | 2 491 * 3 | 4 492 * 当MOT_COUNT配置为0(复位)时,任何不合格的样品都将计数器重置为0*/ 493 494 495 /*这个寄存器允许用户使能或使能 FIFO 缓冲区, 496 *I2C 主机模式和主要 I2C 接口。FIFO 缓冲 497 区,I2C 主机,传感器信号通道和传感器寄存器也可以使用这个寄存器复位*/ 498 #define MPU6050_RA_USER_CTRL 0x6A 499 //bit7 DMP禁止 500 //bit6 当此位设置为0,FIFO缓冲是禁用的 501 //bit5 当这个模式被启用,MPU-60X0即成为辅助I2C总线上的外部传感器slave设备的I2C主机 502 // 当此位被清除为0时,辅助I2C总线线路(AUX_DA and AUX_CL)理论上是由I2C总线 503 // (SDA和SCL)驱动的。这是启用旁路模式的一个前提 504 //bit4 I2C转换至SPI模式(只允许MPU-6000) 505 //bit3 重置DMP模式,官方文档未说明的寄存器 506 //bit2 重置FIFO当设置为1时,此位将重置FIFO缓冲区,此时FIFO_EN等于0。触发重置后,此位将自动清为0 507 //bit1 重置I2C主机当设置为1时,此位将重置I2C主机,此时I2C_MST_EN等于0。触发重置后,此位将自动清为0 508 //bit0 重置所有传感器寄存器和信号路径 如果只重置信号路径(不重置传感器寄存器),请使用寄存器104 509 510 511 /*允许用户配置电源模式和时钟源。还提供了复位整个设备和禁用温度传感器的位*/ 512 #define MPU6050_RA_PWR_MGMT_1 0x6B 513 //bit7 触发一个设备的完整重置。 触发重置后,一个~ 50 毫秒的小延迟是合理的 514 //bit6 寄存器的SLEEP位设置使设备处于非常低功率的休眠模式。 515 //bit5 唤醒周期启用状态当此位设为1且SLEEP禁用时.在休眠模式和唤醒模式间循环,以此从活跃的传感器中获取数据样本 516 //bit3 温度传感器启用状态控制内部温度传感器的使用 517 //bit2-bit0 设定时钟源设置,一个频率为8 mhz的内部振荡器,基于陀螺仪的时钟或外部信息源都可以被选为MPU-60X0的时钟源 518 /* CLK_SEL | 时钟源 519 * --------+-------------------------------------- 520 * 0 | 内部振荡器 521 * 1 | PLL with X Gyro reference 522 * 2 | PLL with Y Gyro reference 523 * 3 | PLL with Z Gyro reference 524 * 4 | PLL with external 32.768kHz reference 525 * 5 | PLL with external 19.2MHz reference 526 * 6 | Reserved 527 * 7 | Stops the clock and keeps the timing generator in reset 528 * */ 529 530 531 /*这个寄存器允许用户配置加速度计在低功耗模式下唤起的频率。也允许用户让加速度计和 532 陀螺仪的个别轴进入待机模式。*/ 533 #define MPU6050_RA_PWR_MGMT_2 0x6C 534 //bit7-bit6 Accel-Only低电量模式下的唤醒频率 535 /* 通过把Power Management 1寄存器(寄存器107)中的PWRSEL设为1, 536 * MPU-60X0可以处于Accerlerometer Only的低电量模式。在这种模式下, 537 设备将关闭除了原I2C接口以外的所有设备,只留下accelerometer以固定时间 538 间隔醒来进行测量。唤醒频率可用LP_WAKE_CTRL进行配置,如下表所示: 539 * LP_WAKE_CTRL | 唤醒频率 540 * -------------+------------------ 541 * 0 | 1.25 Hz 542 * 1 | 2.5 Hz 543 * 2 | 5 Hz 544 * 3 | 10 Hz 545 * */ 546 //bit5 备用的x轴加速度传感器启用状态,也就是进入待机模式 547 //bit4 备用的Y轴加速度传感器启用状态 548 //bit3 备用的Z轴加速度传感器启用状态 549 //bit2 备用的x轴陀螺仪启用状态 550 //bit1 备用的Y轴陀螺仪启用状态 551 //bit0 备用的Z轴陀螺仪启用状态 552 553 /*设定DMP模式下的bank*/ 554 #define MPU6050_RA_BANK_SEL 0x6D 555 //DMP内存配置 556 #define MPU6050_BANKSEL_PRFTCH_EN_BIT 6 557 #define MPU6050_BANKSEL_CFG_USER_BANK_BIT 5 558 #define MPU6050_BANKSEL_MEM_SEL_BIT 4 559 #define MPU6050_BANKSEL_MEM_SEL_LENGTH 5 560 //dmp内存地址设置 561 #define MPU6050_DMP_MEMORY_BANKS 8 562 #define MPU6050_DMP_MEMORY_BANK_SIZE 256 563 #define MPU6050_DMP_MEMORY_CHUNK_SIZE 16 564 565 /*设定DMP模式下的起始地址*/ 566 #define MPU6050_RA_MEM_START_ADDR 0x6E 567 /*一个字节的dmp数据缓存*/ 568 #define MPU6050_RA_MEM_R_W 0x6F 569 /*DMP配置寄存器1*/ 570 #define MPU6050_RA_DMP_CFG_1 0x70 571 /*DMP配置寄存器2*/ 572 #define MPU6050_RA_DMP_CFG_2 0x71 573 574 /*当前FIFO缓冲区大小 575 * 这个值表明了存储于FIFO缓冲区的字节数。 576 * 而这个数字也是能从FIFO缓冲区读取的字节数, 577 * 它与存储在FIFO(寄存器35和36)中的传感器数据组所提供的可用样本数成正比。 578 * 两个寄存器一起构成一个16位数据*/ 579 #define MPU6050_RA_FIFO_COUNTH 0x72 580 #define MPU6050_RA_FIFO_COUNTL 0x73 581 582 /*这个寄存器用于从FIFO缓冲区中读取和编写数据。数据在寄存器编号(从低到高)的指 583 *令下编写入数据写入FIFO。如果所有的FIFO启用标志(见下文)都被启用了且 584 *所有外部传感器数据寄存器(寄存器73至寄存器96)都与一个slave设备相连 585 *,那么寄存器59到寄存器96的内容都将在采样率的指令下编写。 586 * 当传感器数据寄存器(寄存器59到寄存器96)的相关FIFO启用标志在FIFO_EN 寄存 587 * 器35)中都设为1时,它们的内容将被写入FIFO缓冲区。在I2C_MST_CTRL (寄存器 36) 588 * 中能找到一个与I2C Slave 3相连的额外的传感器数据寄存器标志。 589 * 如果FIFO缓冲区溢出,状态位FIFO_OFLOW_INT自动设置为1。 590 * 此位位于INT_STATUS (寄存器58)中。当FIFO缓冲区溢出时,最早的数据将会丢失 591 * 而新数据将被写入FIFO。如果FIFO缓冲区为空, 读取将返回原来从FIFO中读取的 592 * 最后一个字节,直到有可用的新数据。用户应检查FIFO_COUNT,以确保不在FIFO缓冲为空时读取。*/ 593 #define MPU6050_RA_FIFO_R_W 0x74 594 595 /*寄存器是用来验证设备的身份的 默认值是0X34*/ 596 #define MPU6050_RA_WHO_AM_I 0x75 597 //bit6-bit1 设备身份验证 0x34 最高位和最低位都剔除掉 598 599 600 601 602 typedef struct ACCELSTRUCT 603 { 604 s16 accelX; 605 s16 accelY; 606 s16 accelZ; 607 }ACCELSTRUCT; 608 609 typedef struct GYROSTRUCT 610 { 611 s16 gyroX; 612 s16 gyroY; 613 s16 gyroZ; 614 }GYROSTRUCT; 615 616 extern struct ACCELSTRUCT accelStruct ; 617 extern struct GYROSTRUCT gyroStruct ; 618 619 620 u8 MpuInit(void); 621 622 void MpuGetData(void); 623 624 625 626 #endif 627 628 629 630
2. Mpu6050.c
1 #include "mpu6050.h" 2 3 struct ACCELSTRUCT accelStruct = {0,0,0}; 4 struct GYROSTRUCT gyroStruct = {0,0,0}; 5 6 7 //IO方向设置 8 #define MPU_SDA_IN() {GPIOC->CRH&=0XFFFF0FFF;GPIOC->CRH|=8<<12;} 9 #define MPU_SDA_OUT() {GPIOC->CRH&=0XFFFF0FFF;GPIOC->CRH|=3<<12;} 10 11 //IO操作函数 12 #define MPU_SCL PCout(10) //MPU SCL 13 #define MPU_SDA PCout(11) //MPU SDA 14 #define MPU_READ_SDA PCin(11) //输入SDA 15 16 17 /**************************MPU5883 IIC驱动函数*********************************/ 18 19 static void MPU5883IOInit(void) 20 { 21 GPIO_InitTypeDef GPIO_InitStructure; 22 RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOC, ENABLE ); 23 24 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10|GPIO_Pin_11;//PC10 PC11 25 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //推挽输出 26 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; 27 GPIO_Init(GPIOC, &GPIO_InitStructure); 28 29 30 MPU_SCL = 1;//初始化均为浮空状态 31 MPU_SDA = 1; 32 } 33 34 35 36 //发送IIC起始信号 37 static void ComStart(void) 38 { 39 MPU_SDA_OUT(); //sda线输出 40 MPU_SDA=1; 41 MPU_SCL=1; 42 DelayUs(5); 43 MPU_SDA=0;//START:when CLK is high,DATA change form high to low 44 DelayUs(5); 45 MPU_SCL=0;//钳住I2C总线,准备发送或接收数据 46 } 47 //发送IIC停止信号 48 static void ComStop(void) 49 { 50 MPU_SDA_OUT();//sda线输出 51 MPU_SDA=0;//STOP:when CLK is high DATA change form low to high 52 MPU_SCL=1; 53 DelayUs(5); 54 MPU_SDA=1;//发送I2C总线结束信号 55 DelayUs(5); 56 } 57 //等待ACK,为1代表无ACK 为0代表等到了ACK 58 static u8 ComWaitAck(void) 59 { 60 u8 waitTime = 0; 61 MPU_SDA_OUT();//sda线输出 62 MPU_SDA = 1; 63 DelayUs(5); 64 MPU_SDA_IN(); //SDA设置为输入 65 MPU_SCL=1; 66 DelayUs(5); 67 while(MPU_READ_SDA) 68 { 69 waitTime++; 70 DelayUs(1); 71 if(waitTime > MPU_ACK_WAIT_TIME) 72 { 73 ComStop(); 74 return 1; 75 } 76 } 77 MPU_SCL = 0; 78 return 0; 79 80 } 81 82 //static void ComSendAck(void) 83 //{ 84 // MPU_SCL = 0; 85 // MPU_SDA_OUT(); 86 // MPU_SDA = 0; 87 // DelayUs(2); 88 // MPU_SCL = 1; 89 // DelayUs(5); 90 // MPU_SCL = 0; 91 // DelayUs(5); 92 //} 93 94 static void ComSendNoAck(void) 95 { 96 MPU_SCL = 0; 97 MPU_SDA_OUT(); 98 MPU_SDA = 1; 99 DelayUs(2); 100 MPU_SCL = 1; 101 DelayUs(5); 102 MPU_SCL = 0; 103 DelayUs(5); 104 } 105 //返回0 写入收到ACK 返回1写入未收到ACK 106 static u8 ComSendByte(u8 byte) 107 { 108 u8 t; 109 MPU_SDA_OUT(); 110 for(t=0;t<8;t++) 111 { 112 MPU_SDA=(byte&0x80)>>7; 113 byte<<=1; 114 MPU_SCL=1; 115 DelayUs(5); 116 MPU_SCL=0; 117 DelayUs(5); 118 } 119 return ComWaitAck(); 120 } 121 122 static void ComReadByte(u8* byte) 123 { 124 u8 i,receive=0; 125 MPU_SDA_IN();//SDA设置为输入 126 for(i=0;i<8;i++ ) 127 { 128 receive <<= 1; 129 MPU_SCL=1; 130 DelayUs(5); 131 if(MPU_READ_SDA)receive++; 132 MPU_SCL=0; 133 DelayUs(5); 134 } 135 *byte = receive; 136 } 137 138 /**************************MPU5883 IIC驱动函数*********************************/ 139 140 141 //向MPU写入一个字节数据,失败返回1 成功返回0 142 u8 MPUWriteReg(u8 regValue,u8 setValue) 143 { 144 u8 res; 145 ComStart(); //起始信号 146 res = ComSendByte(MPU_ADDR); //发送设备地址+写信号 147 if(res) 148 { 149 #ifdef MPU_DEBUG 150 printf("file=%s,func=%s,line=%d\r\n",__FILE__,__FUNCTION__,__LINE__); 151 #endif 152 return res; 153 } 154 res = ComSendByte(regValue); //内部寄存器地址 155 if(res) 156 { 157 #ifdef MPU_DEBUG 158 printf("file=%s,func=%s,line=%d\r\n",__FILE__,__FUNCTION__,__LINE__); 159 #endif 160 return res; 161 } 162 res = ComSendByte(setValue); //内部寄存器数据 163 if(res) 164 { 165 #ifdef MPU_DEBUG 166 printf("file=%s,func=%s,line=%d\r\n",__FILE__,__FUNCTION__,__LINE__); 167 #endif 168 return res; 169 } 170 ComStop(); //发送停止信号 171 return res; 172 } 173 174 //************************************** 175 //从I2C设备读取一个字节数据 返回值 读取成功或失败 176 //************************************** 177 u8 MPUReadReg(u8 regAddr,u8* readValue) 178 { 179 u8 res; 180 ComStart(); //起始信号 181 res = ComSendByte(MPU_ADDR); //发送设备地址+写信号 182 if(res) 183 { 184 #ifdef MPU_DEBUG 185 printf("file=%s,func=%s,line=%d\r\n",__FILE__,__FUNCTION__,__LINE__); 186 #endif 187 return res; 188 } 189 res = ComSendByte(regAddr); //发送存储单元地址,从0开始 190 if(res) 191 { 192 #ifdef MPU_DEBUG 193 printf("file=%s,func=%s,line=%d\r\n",__FILE__,__FUNCTION__,__LINE__); 194 #endif 195 return res; 196 } 197 ComStart(); //起始信号 198 res = ComSendByte(MPU_ADDR+1); //发送设备地址+读信号 199 if(res) 200 { 201 #ifdef MPU_DEBUG 202 printf("file=%s,func=%s,line=%d\r\n",__FILE__,__FUNCTION__,__LINE__); 203 #endif 204 return res; 205 } 206 ComReadByte(readValue); //读出寄存器数据 207 ComSendNoAck(); //发送非应答信号 208 ComStop(); //停止信号 209 return res; 210 } 211 212 //MPU读取两个字节的数据 213 s16 MpuReadTwoByte(u8 addr) 214 { 215 u8 H,L; 216 MPUReadReg(addr,&H); 217 MPUReadReg(addr+1,&L); 218 return (s16)((((u16)H)<<8)+L); //合成数据 219 } 220 221 /* 222 *初始化,返回0代表失败 返回1代表成功 223 **/ 224 u8 MpuInit(void) 225 { 226 u8 result; 227 u8 id = 0; 228 MPU5883IOInit(); 229 result = MPUReadReg(MPU6050_RA_WHO_AM_I,&id); 230 if(result) return result; //IIC总线错误 231 else 232 { 233 id &= 0x7e;//除去最高位最低位 234 id>>= 1; 235 if(id != 0x34) return 1; //获取到的芯片ID错误 236 } 237 //初始化成功,设置参数 238 MPUWriteReg(MPU6050_RA_PWR_MGMT_1,0x01); // 退出睡眠模式,设取样时钟为陀螺X轴。 239 MPUWriteReg(MPU6050_RA_SMPLRT_DIV,0x04); // 取样时钟4分频,1k/4,取样率为25Hz。 240 MPUWriteReg(MPU6050_RA_CONFIG,2); // 低通滤波,截止频率100Hz左右。 241 MPUWriteReg(MPU6050_RA_GYRO_CONFIG,3<<3); // 陀螺量程,2000dps 242 MPUWriteReg(MPU6050_RA_ACCEL_CONFIG,2<<3); // 加速度计量程,8g。 243 MPUWriteReg(MPU6050_RA_INT_PIN_CFG,0x32); // 中断信号为高电平,推挽输出,直到有读取操作才消失,直通辅助I2C。 244 MPUWriteReg(MPU6050_RA_INT_ENABLE,0x01); // 使用“数据准备好”中断。 245 MPUWriteReg(MPU6050_RA_USER_CTRL,0x00); // 不使用辅助I2C。 246 return 0; 247 } 248 249 250 //获取相应的测量数据 251 void MpuGetData(void) 252 { 253 s16 temp = 0; 254 accelStruct.accelX = MpuReadTwoByte(MPU6050_RA_ACCEL_XOUT_H); 255 accelStruct.accelY = MpuReadTwoByte(MPU6050_RA_ACCEL_YOUT_H); 256 accelStruct.accelZ = MpuReadTwoByte(MPU6050_RA_ACCEL_ZOUT_H); 257 gyroStruct.gyroX = MpuReadTwoByte(MPU6050_RA_GYRO_XOUT_H); 258 gyroStruct.gyroY = MpuReadTwoByte(MPU6050_RA_GYRO_YOUT_H); 259 gyroStruct.gyroZ = MpuReadTwoByte(MPU6050_RA_GYRO_ZOUT_H); 260 temp = MpuReadTwoByte(MPU6050_RA_TEMP_OUT_H); 261 #ifdef MPU_DEBUG 262 printf("accel x = %d ,y = %d ,z = %d \r\n",accelStruct.accelX,accelStruct.accelY,accelStruct.accelZ); 263 printf("gyro x = %d ,y = %d ,z = %d \r\n",gyroStruct.gyroX,gyroStruct.gyroY,gyroStruct.gyroZ); 264 printf("temp is %0.3f \r\n",(((float)temp)/340.0 + 36.53)); 265 #endif 266 267 }
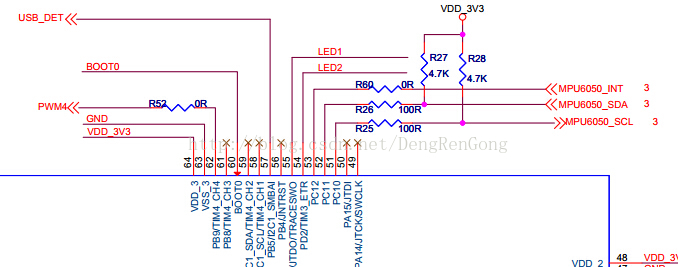
电路图如下

通过加速度传感器和陀螺仪我们就可以知道芯片当前的姿态,从而进行姿态控制,具体姿态算法后续会说明
另,mpu6050有一套自己的DMP姿态解算的算法,不过需要说完姿态解算之后介绍,否则看不懂