目录
1.安装树莓派镜像工具(Raspberry Pi)
用途:用来烧录Ubuntu系统
下载地址:Raspberry Pi OS – Raspberry Pi

2.下载适用于树莓派的Ubuntu
适用于树莓派的Ubuntu系统 清华下载地址:Index of /ubuntu-cdimage/ubuntu/releases/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror![]()
3.通过Raspberry Pi把Ubuntu烧录进SD卡
(1)先擦除SD卡中的数据,烧入确认(擦除操作)


(2)找到刚刚下载的Ubuntu文件,进行烧入

4.启动树莓派
接入电源,接入显示器,接入键盘,接入鼠标(鼠标在桌面出来之前都不需要)
刚开始进去会输入账号和密码默认都是:ubuntu
5.连接网络
方法一:在终端中进行修改
因为只有终端所以需要配置文件来进行联网
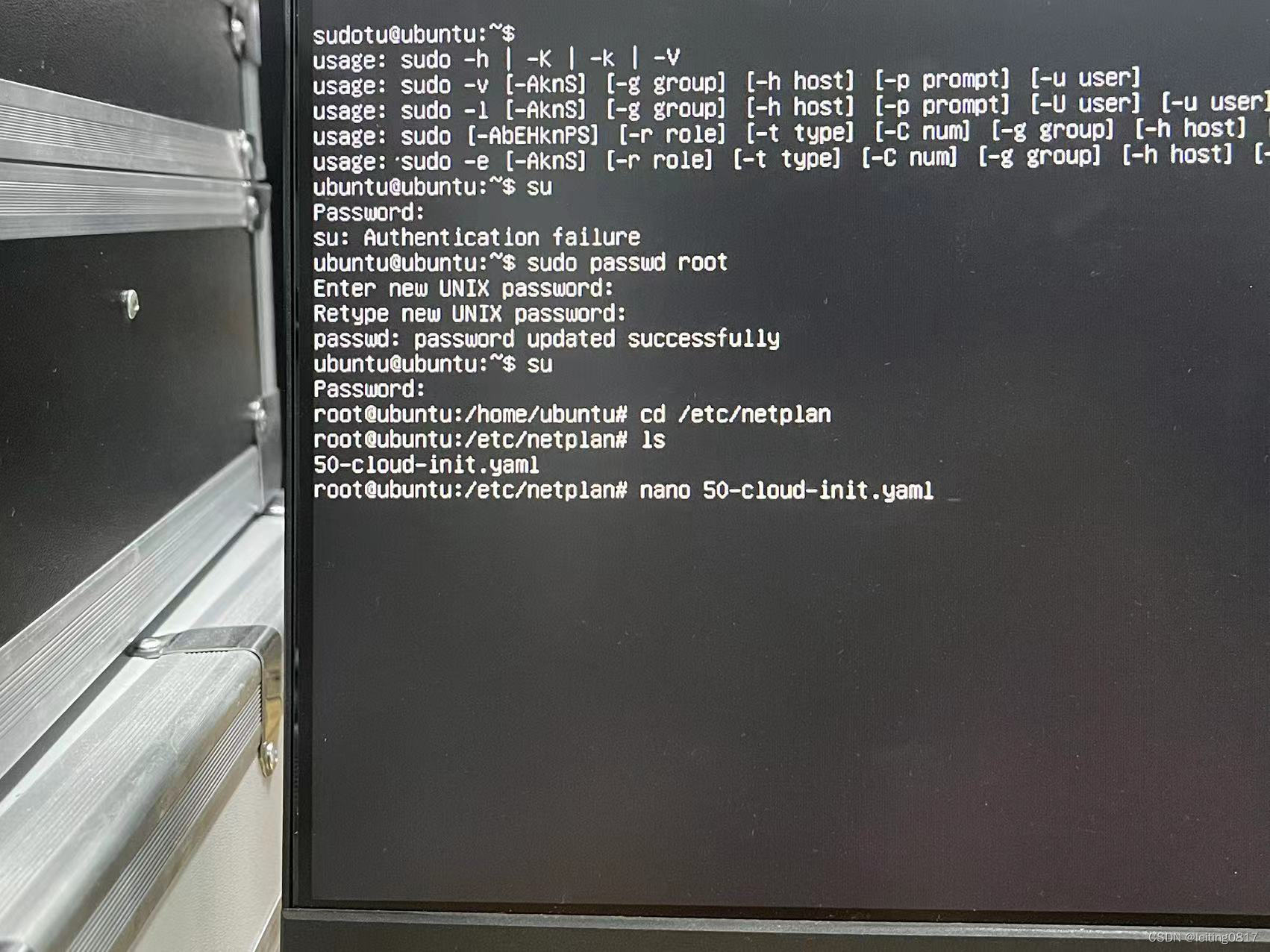
su进入超级用户
su进入路径,找到文件,并且打开
cd /etc/netplan
ls
nano 50-cloud-init.yaml
配置网络
特别注意:每一个:后面必须有一个空格,不要使用tab缩进,每一个缩进是两个空格
network:
ethernets:
eth0:
dhcp4: true
optional: true
version: 2
wifis:
wlan0:
access-points:
'WifiName'(你的wifi名字):
password: 88888888(你的wifi密码)
dhcp4: true
optional: true

使用如下命令使其网络配置生效
sudo netplan generate
sudo netplan applyping一个网站查看是否连接成功
方法二:在启动树莓派之前进行文件配置
将空白的ssh文件放入sd卡
手动创建一个空白记事本.txt文件,命名为ssh,重命名,删掉.txt扩展名。将这个文件放入SD卡的boot盘中。
配置WiFI文件
用同样的方法新建一个空白文件wpa_supplicant.conf(注意要删掉扩展名.txt)
用记事本打开文件,输入以下配置,可以用多个network{}来配置多个wifi:
country=GB
ctrl_interface=DIR=/var/run/wpa_supplicant GROUP=netdev
update_config=1
network={
ssid="替换成第一个WiFi的名字,不删除引号,不能有中文"
psk="替换成WiFi密码,不删除引号"
priority=替换成数字,数字越大代表优先级越高
}
network={
ssid="替换成第二个WiFi的名字,不删除引号,不能有中文"
psk="替换成WiFi密码,不删除引号"
priority=替换成数字,数字越大代表优先级越高
}ssid是wifi名字,psk是密码,priority是优先级,数字大的wifi优先连接。
启动树莓派后,ping一个网站查看是否连接成功
6.直接鱼香ROS,换源安装ROS一步到位
这是一个大佬弄的,非常香,直接一条命令,换源+ROS一步到位,一路选择选项安装即可
wget http://fishros.com/install -O fishros && bash fishros7.刷新本地的软件列表,并安装
sudo apt update这个命令,会读取软件仓库的所有源列表,然后保存在本机。方便本机用户检索、对比。
相当于刷新本地的软件列表。
用户安装软件时,会直接从本地的源列表中,检索出 URL,进行安装。
sudo apt upgrade
将本地安装软件与本地软件列表对比,如本地安装版本低,会提示更新。
8.下载Ubuntu桌面
sudo apt install ubuntu-desktop安装完成后重启即可
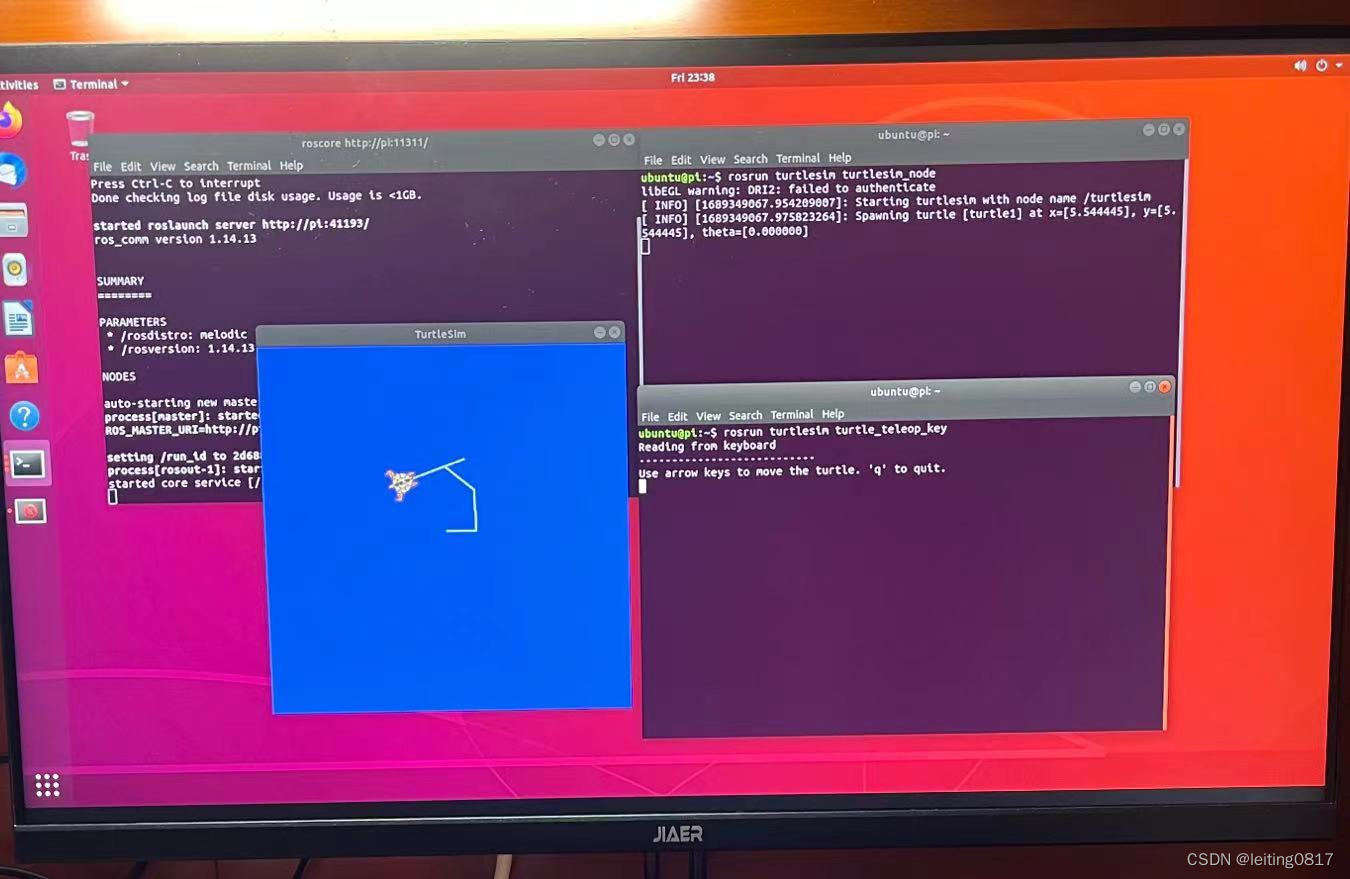
reboot9.成功运行小海龟
启动ros
roscore重新打开一个终端 ,运行成功后会弹出图形化界面
rosrun turtlesim turtlesim_node运行以下代码可以通过上下左右控制小海龟运动
rosrun turtlesim turtle_teleop_key