准备学习ROS,所以在Linux Ubuntu16.04 的系统下安装ROS
(建议初学者,先在虚拟机里进行学习和实践,以避免诸多不必要的麻烦,务必保持网络的畅通)
本教程也是从ROS wiki官网:http://wiki.ros.org/cn/中精简出来的命令行,帮助大家快速构建ROS,如要详细学习ROS的最新知识,还要到上述网站去学习!!!
我这里以ROS Kinetic Kame的教程为例。
不用管其他的配置,直接调出终端,输入以下命令(没有明显的连接失败,error等字样即可进行)
1.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
3.
sudo apt-get update
4.
sudo apt-get install ros-kinetic-desktop-full
5.
sudo rosdep init
6.
rosdep update
7.
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
8.
source ~/.bashrc
9.
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
(这九条代码依次有序的输入到终端里,即可完成ROS的搭建。有序指,一个命令输入到结束后,再输入另一个命令。)
其中需要注意的是在进行到第6步的时候会出现下图所提示的错误:
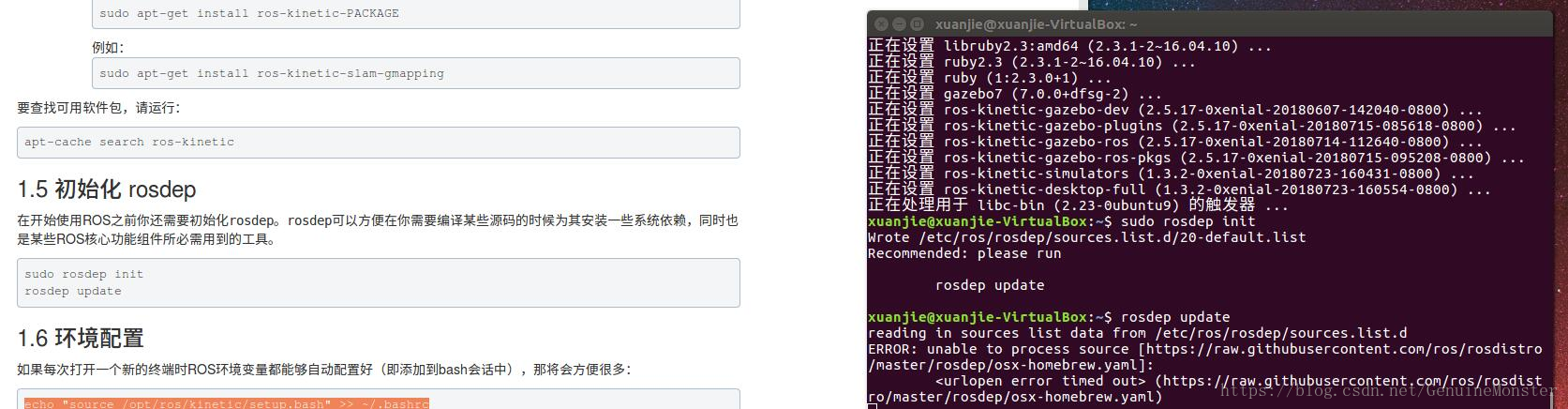
只要Ctrl+c,取消进程后,依次输入如下命令就可以顺利完成搭建。
可以用如下命令检测脚本环境配置是否完成或是否正确:
export | grep ROS
如果发现没有配置,那这个时候你就需要'source'某些'setup.*sh’文件了。
用以下代码即可完成:
source /opt/ros/<distro>/setup.bash
请使用具体的ROS发行版名称代替<distro>。
我们现在安装的是ROS Kinetic,则上述命令改为:
source /opt/ros/Kinetic/setup.bash
在每次打开终端时你都需要先运行上面这条命令后才能运行ros相关的命令,为了避免这一繁琐过程,你可以事先在.bashrc文件(初学者请注意:该文件是在当前系统用户的home目录下。)中添加这条命令,这样当你每次登录后系统已经帮你执行这些命令配置好环境。具体代码为:
vim .bash
在这个目录里(按大写的G),到达最底行,按i,将“source /opt/ros/Kinetic/setup.bash”添加进去,按“:”输入wq保存退出即可。