I2C
I2C(内部集成电路)总线可用于与连接到与 ESP32 相同的总线的多个外部设备进行通信。 ESP32 板上有两个 I2C 控制器,每个控制器可以设置为主模式或从模式。
概述
以下部分将指导您完成配置和操作 I2C 驱动程序的基本步骤:
- 配置驱动程序 - 选择驱动程序的参数,如主模式或从模式,设置特定的 GPIO 引脚作为 SDA 和 SCL,设置时钟速度等。
- 安装驱动程序 - 在主站或从站模式下激活驱动程序,以便在 ESP32 上运行两个 I2C 控制器其中一个。
- 进行通讯:
- 主机模式 - 作为主机运行通信
- 从机模式 - 从机响应来自主机的消息
- 中断处理 - 配置和 I2C 中断服务。
- 超出默认值 - 调整 I2C 通信的时序,引脚配置和其他参数。
- 错误处理 - 如何识别和处理驱动程序配置和通信错误。
- 删除驱动程序 - 在通信结束时释放 I2C 驱动程序所使用的资源。
I2C 驱动程序标识是从 i2c_port_t中选择的两个端口号之一。在驱动程序配置期间通过i2c_mode_t选择“master”或“slave”指定端口的操作模式。
配置驱动程序
建立I2C通信的第一步是配置驱动程序。 这是通过设置i2c_config_t结构中包含的几个参数来完成的:
- I2C操作模式 - 从
i2c_opmode_t中选择slave或master - 通讯引脚配置:
- 分配给SDA和SCL信号的GPIO引脚编号
- 是否为各个引脚启用ESP32的内部上拉
- I2C时钟速度,如果此配置涉及主模
- 如果此配置涉及从属模式:
- 是否应启用10位地址模式
- 从机地址
然后,要初始化给定I2C端口的配置,请使用端口号和i2c_config_t结构作为函数调用参数调用函数i2c_param_config()。
在此阶段,i2c_param_config()还将“其他I2C配置参数”设置为常用的默认值。 要检查值是什么以及如何更改它们,请参阅超出默认值。
安装驱动程序
初始化配置后,下一步是通过调用i2c_driver_install()来安装 I2C 驱动程序。 此函数调用需要以下参数:
- 端口号,可用的两个端口之一,从
i2c_port_t中选择 - 从
i2c_opmode_t中选择的操作模式,从机或主机 - 将分配用于在从机模式下发送和接收数据的缓冲区的大小
- 用于分配中断的标志
进行通讯
安装I2C驱动程序后,ESP32即可与其他I2C设备通信。 通信编程取决于所选I2C端口是以主机模式还是从机模式工作。
主机模式
ESP32 工作在主机模式的 I2C 端口负责与从 I2C 设备建立通信,并发送命令以触发从机设备工作,如进行测量和发回结果。
为了组织这个过程,驱动程序提供了一个称为“command link”的容器,该容器应填充一系列命令,然后传递给 I2C 控制器执行。
主机 Write
构建 I2C 主设备向从设备发送n个字节的命令链接的示例如下所示:
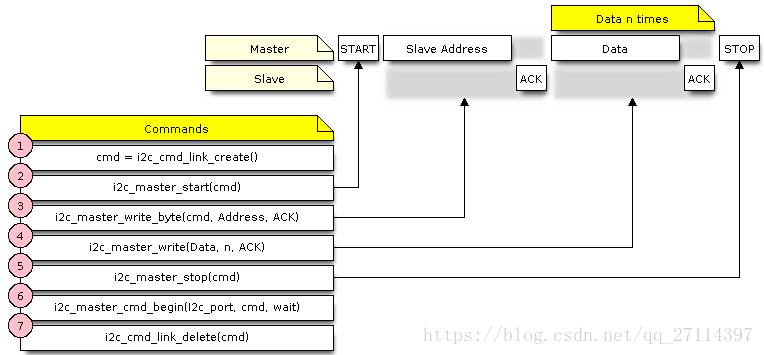
下面介绍如何设置“主写入”的命令链接以及内部的内容:
- 第一步是使用
i2c_cmd_link_create()创建命令链接。然后命令链接填充一系列要发送给从站的数据:
- 起始位 -
i2c_master_start() - 单字节从机地址 -
i2c_master_write_byte()。 该地址作为此函数调用的参数提供。 - 一个或多个字节的数据作为
i2c_master_write()的参数。 - 停止位 -
i2c_master_stop()
- 起始位 -
i2c_master_write_byte()和i2c_master_write()命令都有另外的参数来定义slave是否应该确认接收的数据。
2. 通过调用i2c_master_cmd_begin()来触发 I2C 控制器执行命令链接。
3. 最后一步,完成命令发送后,通过调用i2c_cmd_link_delete()释放命令链接使用的资源。
主机 Read
和主机类似的步骤序列,用于从从机读取数据。
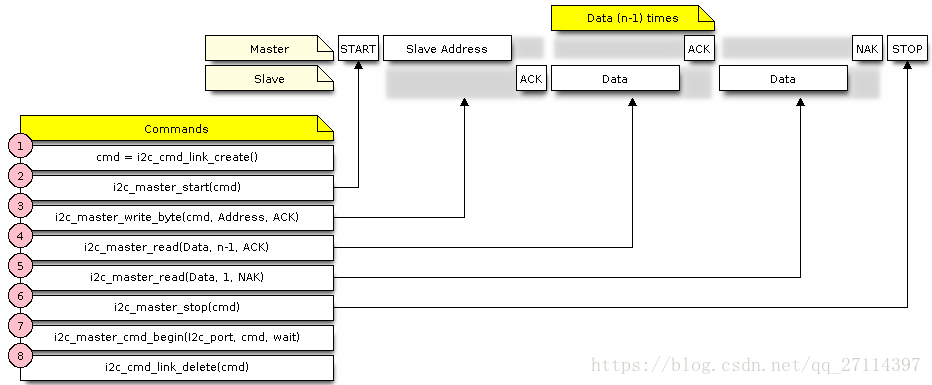
在读取数据时,不是“i2c_master_read …”,而是使用i2c_master_read_byte()和/或i2c_master_read()填充命令链接。 此外,最后一次读取配置为不提供主机的确认。
发送从机地址后,请参见上图中的步骤3,主机可以写入或从从机读取数据。 主设备实际执行的操作信息隐藏在从设备地址的最低位。
因此,命令链接指示从机主机将写入数据包含地址,如(ESP_SLAVE_ADDR << 1)| I2C_MASTER_WRITE,如下所示:
从机模式
API提供了从属设备读取和写入数据的功能 - * i2c_slave_read_buffer()和i2c_slave_write_buffer()。 peripherals/i2c中提供了使用这些功能的示例。
中断处理
调用函数i2c_isr_register()注册中断处理程序,调用i2c_isr_free()删除处理程序。 ESP32技术参考手册(PDF)中提供了 I2C 控制器触发的中断描述。
超出默认值
在驱动程序配置期间(调用i2c_param_config()时,请参阅配置驱动程序),有一些 I2C 通信参数设置为某些默认的常用值。 某些参数也已在 I2C 控制器的寄存器中配置。 通过调用专用函数,可以将这些参数更改为用户定义的值:
- SCL 脉冲周期为高和低 -
i2c_set_period() - 在产生启动/停止信号期间使用的 SCL 和 SDA 信号时序 -
i2c_set_start_timing()/i2c_set_stop_timing() - 从器件采样时以及通过主器件发送时 SCL 和 SDA 信号之间的时序关系 -
i2c_set_data_timing() I2C 超时 -
i2c_set_timeout()定时值在 APB 时钟周期中定义。 APB的频率在
I2C_APB_CLK_FREQ中指定。首先发送/接收 LSB 或 MSB -
i2c_set_data_mode()可在i2c_trans_mode_t中定义的模式中选择
上述每个函数都有一个_get_对应项来检查当前设置的值。
要在驱动程序配置期间查看参数设置的默认值,请参阅文件driver / i2c.c查找定义了_DEFAULT后缀。
通过功能i2c_set_pin(),还可以选择不同的 SDA 和 SCL 引脚并改变上拉配置,改变已经输入的i2c_param_config()。
ESP32 的内部上拉电阻范围为几十 kOhm,因此在大多数情况下,它们本身不足以用作 I2C 上拉电阻。 我们建议添加外部上拉电阻,其值如 I2C 标准中所述。
错误处理
大多数驱动程序的函数在成功完成时返回ESP_OK,或者在失败时返回特定的错误代码。 始终检查返回的值并实现错误处理是一种好习惯。 例如,驱动程序也打印出日志消息。 检查输入配置的正确性,其中包含错误说明。 有关详细信息,请参阅文件driver / i2c.c查找定义_ERR_STR后缀。
使用专用中断来捕获通信故障。 例如,当 I2C 花费太长时间来接收数据时,会触发I2C_TIME_OUT_INT中断。 有关相关信息,请参阅中断处理。
要在通信失败时重置内部硬件缓冲区,可以使用i2c_reset_tx_fifo()和i2c_reset_rx_fifo()。
删除驱动程序
如果使用i2c_driver_install()建立 I2C 通信一段时间之后不再需要 I2C 通信,则可以通过调用i2c_driver_delete()来移除驱动程序以释放分配的资源。
应用示例
I2C 主机和从机示例:peripherals/i2c.