导师研究的课题是永磁同步电机的控制,首先给我安排的任务就是将其矢量控制系统仿真搭建出来。本文记录矢量控制系统学习过程。因为是初学我的理解可能不够,其中每个内容的出处都会在文章内标注出来,大家可以参考原文原著。
1、永磁同步电机的数学模型 (参考于解小刚、陈进采用Id=0永磁同步电机矢量控制文章)
永磁同步电机是一个非线性系统,具有多变量、强耦合的特点。我们对其分析的时候有以下假设:
- 忽略铁芯饱和,不计涡流和磁滞损耗
- 忽略换相过程中的电枢反应
- 转子上无阻尼绕组,永磁体无阻尼作用
- 永磁体产生的磁场和三相绕组产生的感应磁场呈正弦分布
- 定子绕组电流在气隙中只产生正弦分布的磁势,无高次谐波
在此理想条件下:
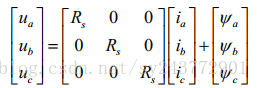
1.1 永磁同步电机在三相静止坐标系下定子电压方程:
式中Rs为电枢电阻,ψa ψb ψc分别为abc三相磁链
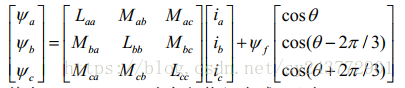
1.2 三相静止坐标系下磁链方程
其中Laa、Lbb、Lcc为各相绕组自感,且Laa=Lbb=Lcc,式中Mab等为绕组之间互感且均相等。ψf是永磁体磁链,θ为转子N极和a相轴线之间的夹角。
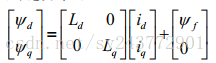
经过CLARK和PARK左边变换后,得到其在dq坐标系下的数学模型:
1.3 dq坐标系下电压方程
其中ud、uq为dq轴电压,id、iq为dq轴电流,ψd、ψq为dq轴磁链,Ld、Lq为dq轴电感,we为转速。
1.4 dq坐标系下磁链方程
1.5 转矩方程
从上1.5中转矩方程可以看出,电磁转矩由两个部分组成,第一项是永磁体和定子绕组磁链之间相互作用产生,第二项则是由磁阻变化而产生的。这里我们需要区分一下凸极和隐极电机的区别,隐极电机由于Lq=Ld,所以磁阻变化转矩是凸极电机特有的,我们在搭建仿真的时候也需要注意这的电机类型。


2、永磁同步电机控制原理
矢量控制框图如下图所示:

矢量控制的原理是在永磁同步电机上设法模拟直流电动机的转矩控制规律,经过坐标变换,使其电流矢量分解为产生磁通的电流分量和产生转矩的电流分量,两个分量互相垂直,相互独立。这样就可以对它们进行单独调节,与直流电动机的双闭环控制系统类似。(双闭环控制系统在陈伯时电力拖动控制书的2.4章节有详细的介绍,有需要的可以回顾一下。大三学的现在基本都忘了-_-)
对以上框图的理解从反馈到给定再到SVPWM,按照顺时针方向推进。
2.1 坐标变换(参考于陈伯时电力拖动自动控制系统6.6.3章节)
2.1.1 进行坐标变换的原因
- 永磁同步电机中,定子磁势Fs、转子磁势Fr、气隙磁势之间的夹角都不是90°,耦合性强,根本无法对磁场和电磁转矩进行独立控制
- 直流电机励磁磁场垂直于电枢磁势,二者各自独立,互不影响
直流电机控制策略多种多样,能够使其应对不同场合
所以将永磁同步电机的数学模型分析后,进行坐标变换将其模拟为直流电机进行控制,会很大程度上提高电机可控性和运行效率。
2.1.2 坐标变换基本思路**
*
不同电机模型等效的原则:在不同坐标系所产生的磁动势完全一致。
*

如上图中a中,电机通入三相平衡的正弦电流时,所产生的合成磁动势是旋转磁动势,它在空间上是呈正弦分布的,以同步转速w1顺着A-B-C的顺序进行旋转。而旋转磁动势,并不是只有三相绕组才可以产生,通入平衡的多相电流都可以产生想要的旋转电磁场,其中两相的最为简便。只需要通入时间上互查90°的平衡交流电就可以产生旋转磁场。如果控制a中和b中的旋转磁动势的大小和转速都相同,那么即可认为二者等效。
在看c图,两个相互垂直的绕组M和T,其中通以电流im和it,产生合成磁动势F,显然这个磁动势相对于M和T绕组是固定的,这个时候如果人为的将两个绕组在内的整个铁芯按照以上同步转速旋转,那么即可以产生跟三相绕组等效的旋转磁场。如果假设有人站在这个铁芯上看,这个电机的模型就完全与直流电机等效了。
磁动势的等效也就代表着电流的等效,iA/iB/iB 、ia/ib 和 im/it等效,他们三者能产生相同的磁动势,现在最重要的任务就是找到 以上三组电流之间准确的等效关系。
2.3 3相静止-两相静止变换——3/2变换
物理基础:各相磁动势=有效匝数 * 电流大小

如上图所示,为方便起见,将A相与a相重合,ABC为三相静止磁动势矢量图,ab为两相静止磁动势矢量图。
当两者磁动势相等时,两套绕组瞬时磁动势在ab轴上的投影相等。
即有以下关系式:


由陈伯时书籍附录4所证明,变换前后功率不变时,三相和两相的匝数比为

结合以上二式可得变换矩阵为:

若三相绕组是Y形联结不带零线,那么ia+ib+ic=0,代入上式可得变换矩阵:

2.4 两相静止-两相旋转变换——2s/2r变换

如上图所示,ab为两相静止坐标系,MT为两相旋转坐标系,两相交流电 ia/ib 和两个直流电流 im/it 产生相同的以同步转速w1旋转的合成磁动势。